
基于机电联合仿真的天线伺服系统控制性能优化设计方法.pdf

努力****承悦


1/10

2/10

3/10
4/10

5/10
6/10

7/10
8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于机电联合仿真的天线伺服系统控制性能优化设计方法.pdf
本发明公开了一种基于机电联合仿真的天线伺服系统控制性能优化设计方法,属于天线系统优化设计领域。本发明运用了刚体动力学建模方法,建立了天线系统控制方案,设计了控制方案的优化流程,实现了较精准地跟踪天线系统的目标路径。该方法基于机电联合一体化仿真,考虑对天线机械系统的控制闭环子系统进行自动化优化,可提高天线控制性能,降低样机试制成本。
基于联合仿真的机电液一体化系统优化设计方法研究.pptx
,目录PartOnePartTwo机电液一体化系统概述联合仿真技术介绍研究意义与目的PartThree系统优化设计流程联合仿真模型的建立优化算法选择与实现优化结果评估与验证PartFour仿真模型建立与验证优化设计实例分析技术优势与局限性分析PartFive研究成果总结创新点与贡献研究展望与未来发展方向PartSixTHANKS

基于联合仿真的机电液一体化系统优化设计方法研究的中期报告.docx
基于联合仿真的机电液一体化系统优化设计方法研究的中期报告一、研究背景及意义:随着科技的快速发展,机电液一体化系统已逐渐应用于工业生产中,其解决了传统机械系统存在的电、气、液、机一体化程度低、控制精度不高、能源利用效率低等问题。同时,机电液一体化系统优化设计也成为了一个热门领域,如何提高系统的效率、降低能耗、保持系统的安全性等问题一直是制造业界的关注点。此外,机电液一体化系统涉及多个领域知识,如机械、电气、液压等,因此需要进行联合仿真分析,提高系统设计的精度和可靠性。二、研究内容:本文主要通过建立机电液一体

基于联合仿真的机电液一体化系统优化设计方法研究的开题报告.docx
基于联合仿真的机电液一体化系统优化设计方法研究的开题报告一、选题背景随着工业自动化水平的不断提高,机电液一体化系统在工业生产线中得到了广泛的应用。机电液一体化系统是将机械、电器、液压等技术有机结合起来,形成一个集成化的系统,实现自动化控制、运动控制等功能。对于机电液一体化系统的优化设计,需要考虑系统的动态性、稳定性、可靠性等方面,因此需要进行大量的试验和仿真研究。而传统的试验方法成本较高、周期较长,因此,利用联合仿真技术进行机电液一体化系统的优化设计成为了研究的热点。二、研究内容和目的本研究以机电液一体化
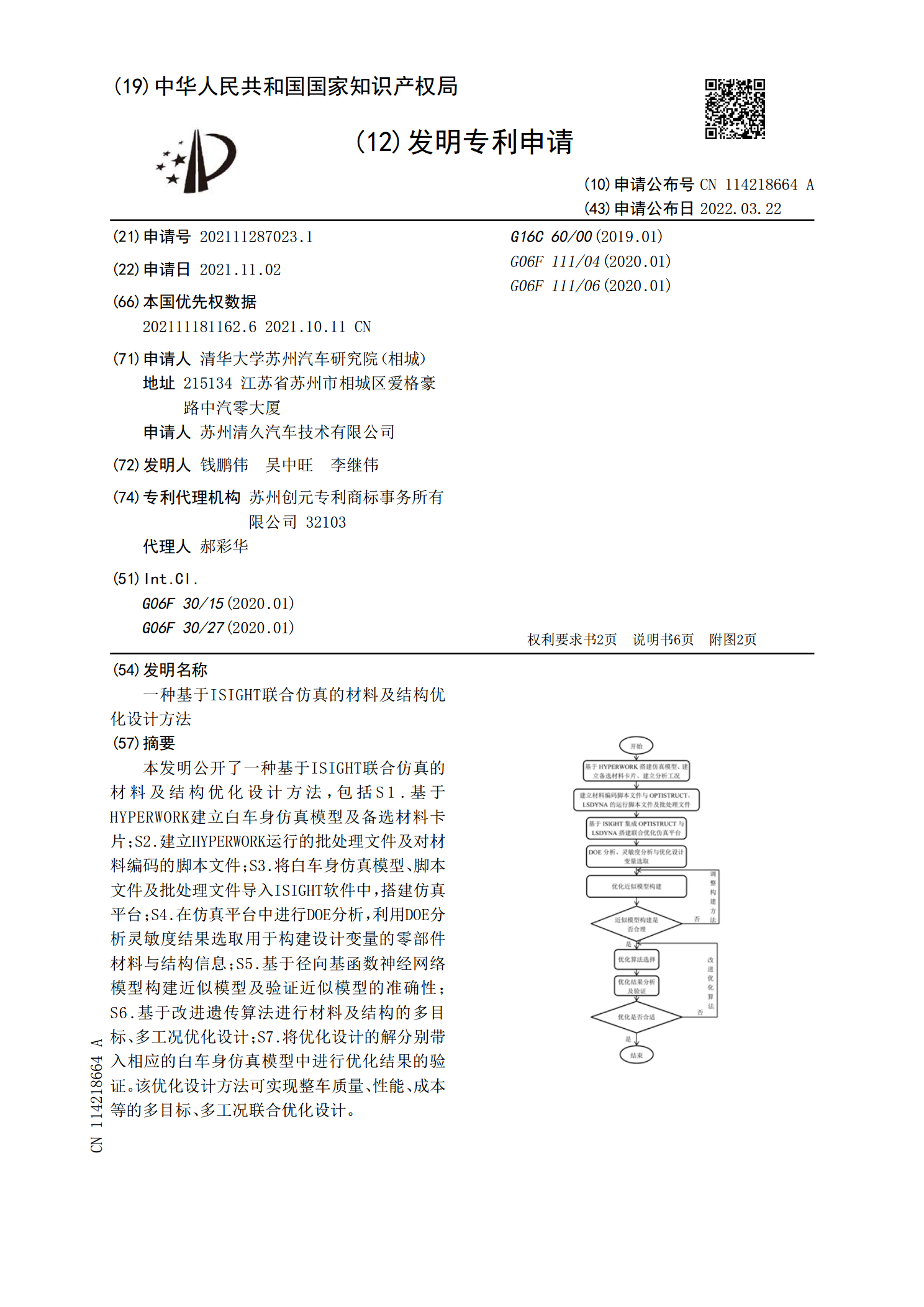
一种基于ISIGHT联合仿真的材料及结构优化设计方法.pdf
本发明公开了一种基于ISIGHT联合仿真的材料及结构优化设计方法,包括S1.基于HYPERWORK建立白车身仿真模型及备选材料卡片;S2.建立HYPERWORK运行的批处理文件及对材料编码的脚本文件;S3.将白车身仿真模型、脚本文件及批处理文件导入ISIGHT软件中,搭建仿真平台;S4.在仿真平台中进行DOE分析,利用DOE分析灵敏度结果选取用于构建设计变量的零部件材料与结构信息;S5.基于径向基函数神经网络模型构建近似模型及验证近似模型的准确性;S6.基于改进遗传算法进行材料及结构的多目标、多工况优化设