
一种信息控制方法、装置、系统、设备和存储介质.pdf

书生****ma

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种信息控制方法、装置、系统、设备和存储介质.pdf
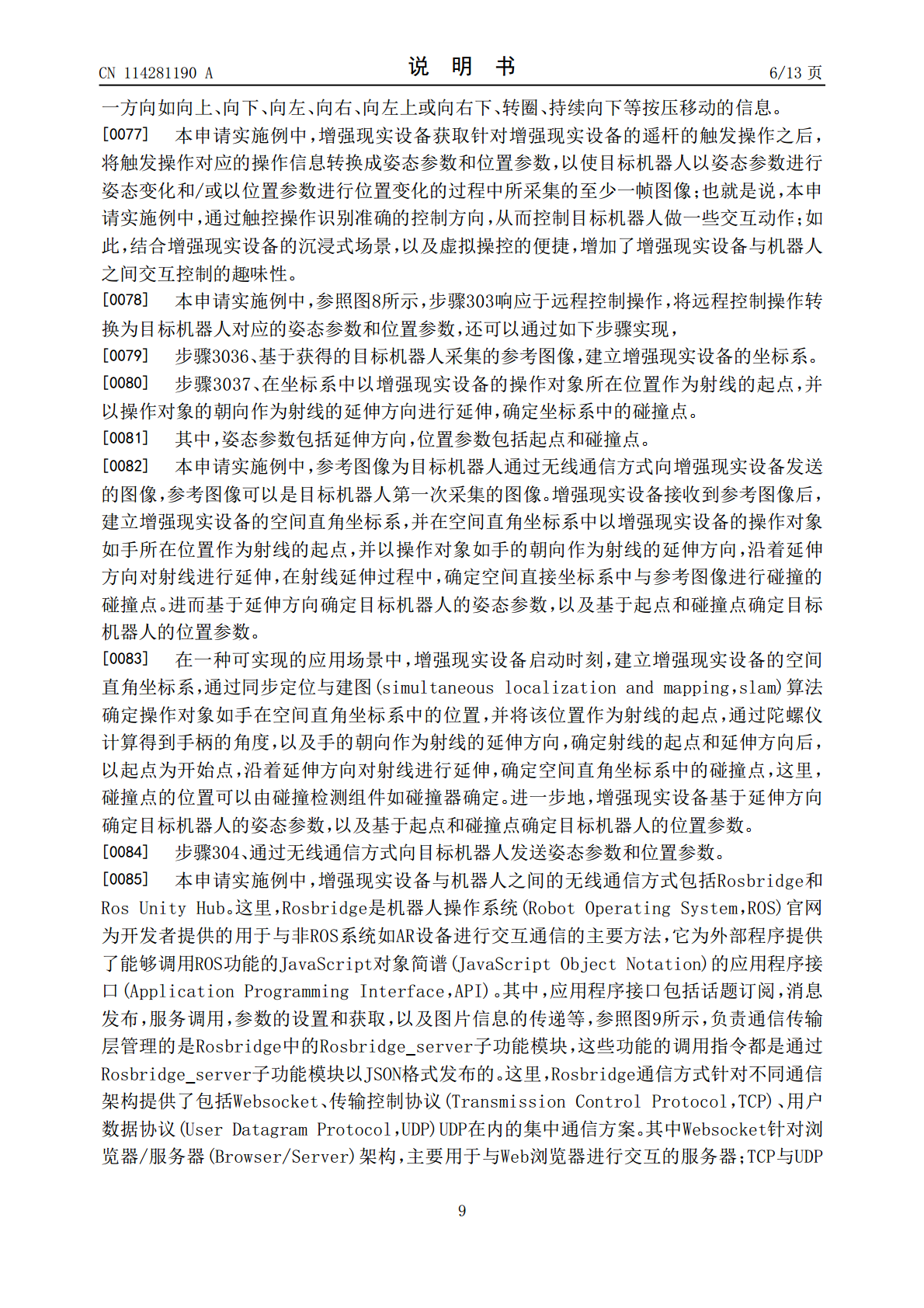
本申请实施例公开了一种信息控制方法,方法包括:响应于针对机器人的选择操作,选择目标机器人;响应于针对目标机器人的远程控制操作,获得目标机器人在远程控制操作下所采集的至少一帧图像,并在增强现实设备上呈现至少一帧图像。本申请实施例同时还公开了一种信息控制装置、机器人控制系统、增强现实设备和存储介质。
一种信息通知方法、装置、系统、设备和存储介质.pdf
本发明公开了一种信息通知方法、装置、系统、设备和存储介质。该方法包括:根据接收到的peer节点发送的验证失败结果生成对应的失败标记信息;其中,验证失败结果为peer节点对一个待验证消息进行验证得到的结果;在失败标记信息的当前累计数量达到预先配置的背书策略数量时,确定待验证消息相关联对应的无效消息;对无效消息执行剔除操作,得到对应的目标消息。本实施例通过对验证失败的待验证消息相关联的无效消息执行剔除操作,避免了无效消息的进一步验证,从而减少了计算开销和存储空间。

换挡控制方法、装置、设备、存储介质和系统.pdf
本申请属于汽车技术领域,具体涉及一种换挡控制方法、装置、设备、存储介质和系统。所述方法应用于油电混动四驱车辆,所述车辆包括动力单元和分动箱,所述动力单元包括控制器、以及与所述控制器连接的发动机和驱动电机,所述方法应用于所述动力单元的控制器,其通过在接收到分动箱发送的防阻请求时,判断驱动电机是否正常运行;在驱动电机正常运行时,控制驱动电机输出预设扭矩值,使得啮合组件中的至少部分结构发生转动;在驱动电机无法运行时,控制发动机按照预设转速转动,使得啮合组件中的至少部分结构发生转动,从而消除啮合卡滞;该方法消除了

设备的功能控制方法、装置、系统和存储介质.pdf
本申请涉及一种设备的功能控制方法、系统、装置和存储介质。所述方法包括:获取语音控制设备发送的语音验证码并验证是否正确,语音验证码通过购买设备的功能服务得到;在语音验证码验证正确后,根据语音验证码激活设备的所述功能服务;当获取到语音控制设备发送的功能控制语音时,验证语音控制设备对应的语音验证码是否有效;在语音验证码有效时,根据功能控制语音控制设备的功能服务。采用本方法能够提高使用的便捷性和安全性。
一种信息生成的方法、装置、系统和存储介质.pdf
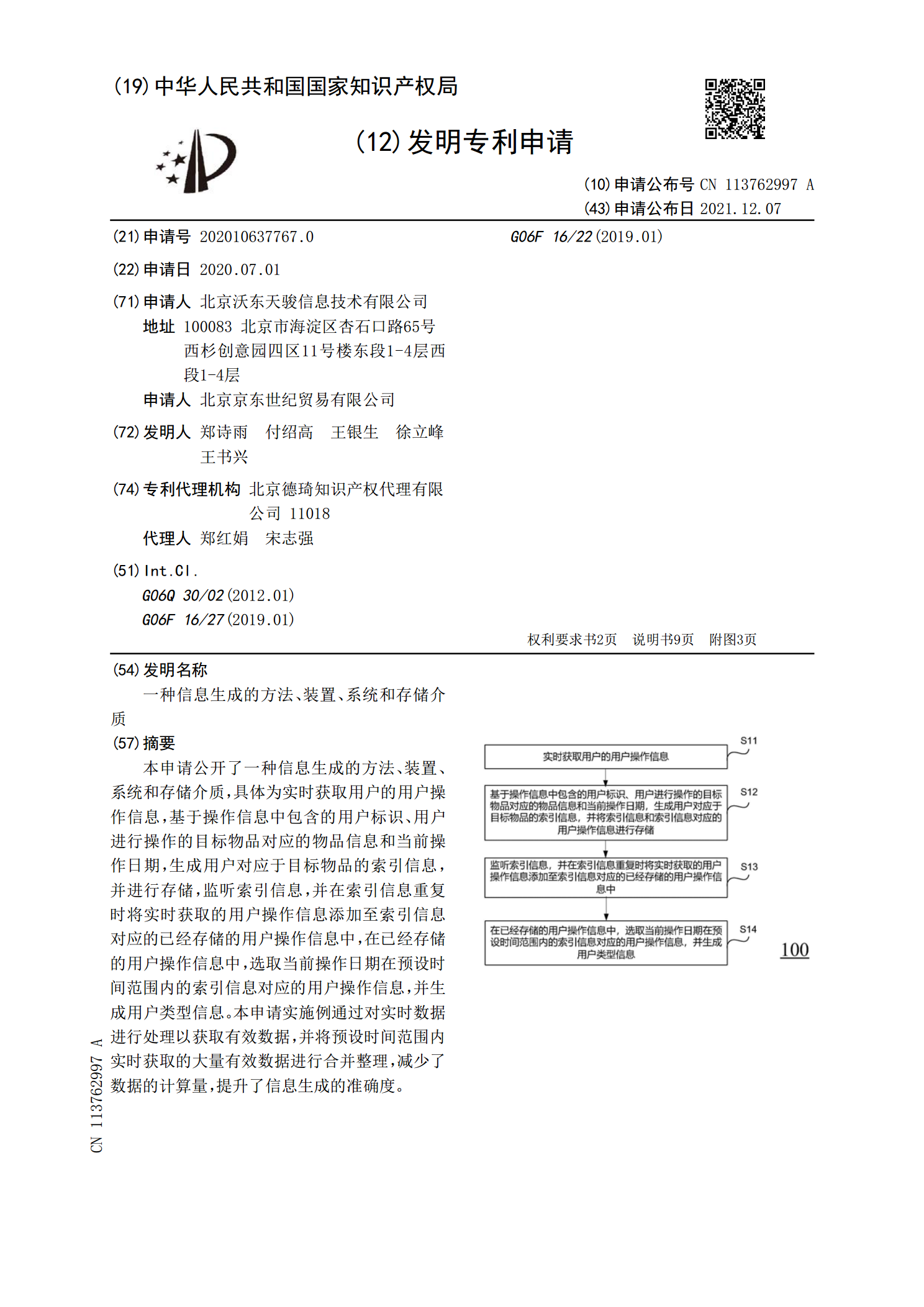
本申请公开了一种信息生成的方法、装置、系统和存储介质,具体为实时获取用户的用户操作信息,基于操作信息中包含的用户标识、用户进行操作的目标物品对应的物品信息和当前操作日期,生成用户对应于目标物品的索引信息,并进行存储,监听索引信息,并在索引信息重复时将实时获取的用户操作信息添加至索引信息对应的已经存储的用户操作信息中,在已经存储的用户操作信息中,选取当前操作日期在预设时间范围内的索引信息对应的用户操作信息,并生成用户类型信息。本申请实施例通过对实时数据进行处理以获取有效数据,并将预设时间范围内实时获取的大量