
基于改进蚁群算法的自动导引运输车全局路径规划方法研究.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于改进蚁群算法的自动导引运输车全局路径规划方法研究.docx
基于改进蚁群算法的自动导引运输车全局路径规划方法研究基于改进蚁群算法的自动导引运输车全局路径规划方法研究摘要:随着自动导引运输车在物流和工业等领域的广泛应用,全局路径规划成为其关键技术之一。传统的全局路径规划方法如A*算法和Dijkstra算法在规划效率和路径质量方面存在一定的不足。为了解决这一问题,本文提出了一种基于改进蚁群算法的自动导引运输车全局路径规划方法。通过对蚁群算法进行改进,结合自动导引运输车的特点,提高了路径规划的效率和路径质量。实验结果表明,该方法能够有效规划出全局路径,提高自动导引运输车
一种基于改进蚁群算法的全局规划路径方法.pdf
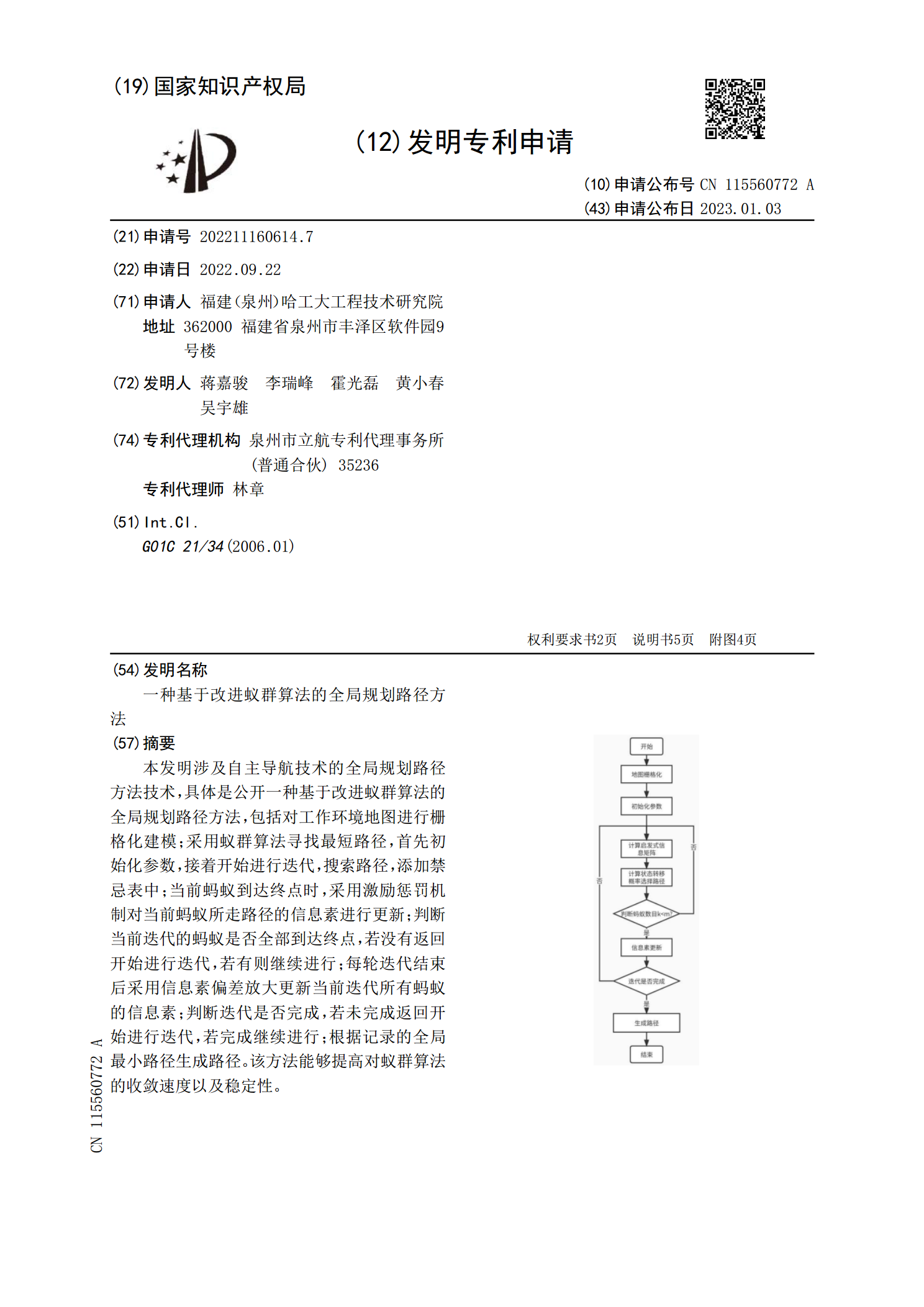
本发明涉及自主导航技术的全局规划路径方法技术,具体是公开一种基于改进蚁群算法的全局规划路径方法,包括对工作环境地图进行栅格化建模;采用蚁群算法寻找最短路径,首先初始化参数,接着开始进行迭代,搜索路径,添加禁忌表中;当前蚂蚁到达终点时,采用激励惩罚机制对当前蚂蚁所走路径的信息素进行更新;判断当前迭代的蚂蚁是否全部到达终点,若没有返回开始进行迭代,若有则继续进行;每轮迭代结束后采用信息素偏差放大更新当前迭代所有蚂蚁的信息素;判断迭代是否完成,若未完成返回开始进行迭代,若完成继续进行;根据记录的全局最小路径生成

改进蚁群算法在AGV全局路径规划中的研究.docx
改进蚁群算法在AGV全局路径规划中的研究标题:蚁群算法在AGV全局路径规划中的研究与改进摘要:蚁群算法是一种启发式算法,灵感来源于蚂蚁的觅食行为,已被广泛应用于全局路径规划问题。本文综述了蚁群算法在AGV(自动导引车)全局路径规划中的研究进展,并对其进行了改进。首先介绍了蚁群算法的基本思想和步骤,然后分析了在AGV全局路径规划应用中的问题和挑战,包括路径选择的多样性、算法的收敛速度和路径长度的优化。接着,提出了一种改进的蚁群算法,结合了启发式信息的引入、路径优化策略和多目标优化方法,以提高算法的性能和效率

基于改进蚁群算法的煤矿救援机器人全局路径规划研究.docx
基于改进蚁群算法的煤矿救援机器人全局路径规划研究基于改进蚁群算法的煤矿救援机器人全局路径规划研究摘要:随着科学技术的进步和工业化的发展,矿井事故的频发对工人的生命财产安全产生了严重的威胁。传统的煤矿救援方法存在着效率低、风险大等问题,因此研究一种高效可靠的煤矿救援机器人全局路径规划方法具有重要的理论和实际意义。本文将基于改进蚁群算法的全局路径规划算法,应用于煤矿救援机器人的路径规划中,以提高矿井救援的效率和安全性。关键词:煤矿救援;机器人;全局路径规划;蚁群算法一、引言矿井事故是煤矿产业中的一大难题,长期

一种基于改进蚁群算法的机器人全局路径规划方法.pdf
本发明请求保护一种基于改进蚁群算法的机器人全局路径规划的方法,属于移动机器人路径规划领域。该方法包括步骤:S1,机器人根据实际环境地图构建合适的栅格地图;S2,根据机器人构建的地图,对地图进行区域划分;S3,对划分的不同区域进行不均匀分层的初始化信息素浓度的赋值;S4,算法进行迭代,机器人根据不均匀分层的初始信息素浓度进行选择下一个路径节点;S5,算法进行多次迭代,每一次迭代后对算法的启发函数进行重新计算,然后计算选择下一个节点的概率;S6,算法每次迭代后对路径上的信息素浓度进行重新计算。本发明降低了算法