
目标跟踪控制方法及装置、机械臂控制设备和存储介质.pdf

丹烟****魔王


1/10

2/10

3/10

4/10
5/10
6/10
7/10

8/10

9/10

10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

目标跟踪控制方法及装置、机械臂控制设备和存储介质.pdf
本申请提供一种目标跟踪控制方法及装置、机械臂控制设备和存储介质,涉及机器臂控制技术领域。本申请在获取到智能机械臂的作业工具末端在当前控制时刻的实时作业位姿和实时位姿变化速度,以及待处理目标在当前控制时刻的实时目标位姿后,会根据实时作业位姿及实时目标位姿,调用针对待处理目标的位姿时变速度场模型,计算从实时作业位姿指向实时目标位姿的目标位姿变化速度,接着基于实时位姿变化速度对目标位姿变化速度进行速度场平滑处理,得到作业工具末端的期望位姿变化速度,然后按照期望位姿变化速度控制智能机械臂针对待处理目标进行跟踪运动
机械臂控制方法、装置、控制设备及存储介质.pdf
本发明提出一种机械臂控制方法、装置、控制设备及存储介质,其中,方法包括:获取机械臂应用场景全局图像及机械臂各关节轴分别对应的各当前角度值,其中场景全局图像用于表征机械臂与目标点的相对位置;根据所述机械臂应用场景全局图像及各当前角度值,利用预先训练的神经网络模型,确定下一时刻机械臂各关节轴分别对应的各目标角度值;根据所述各目标角度值,控制所述机械臂移动。通过本方法,实现了利用神经网络模型对机械臂动作的预测,提高对机械臂动作预测的准确性提高机械臂动作的灵活性。
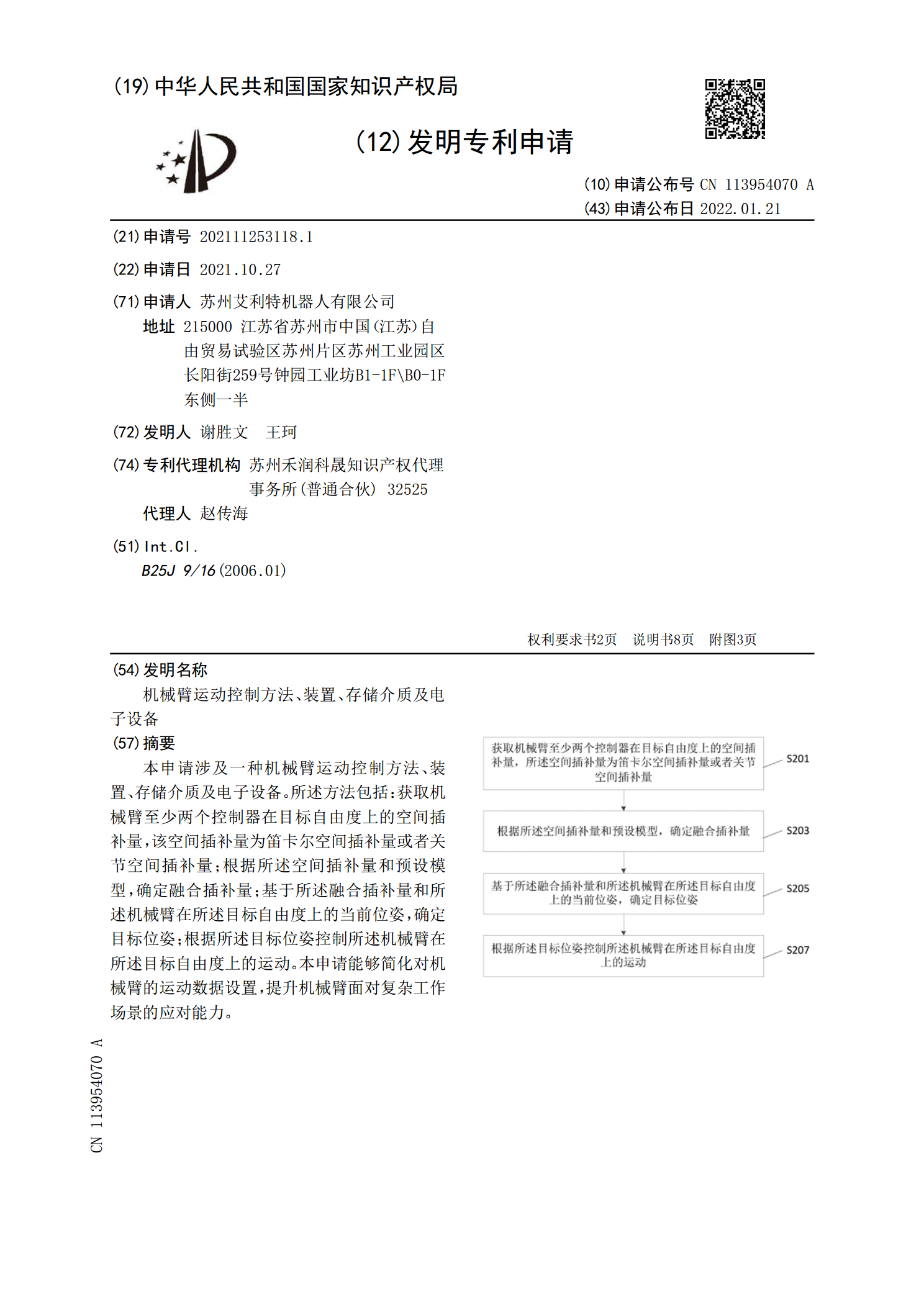
机械臂运动控制方法、装置、存储介质及电子设备.pdf
本申请涉及一种机械臂运动控制方法、装置、存储介质及电子设备。所述方法包括:获取机械臂至少两个控制器在目标自由度上的空间插补量,该空间插补量为笛卡尔空间插补量或者关节空间插补量;根据所述空间插补量和预设模型,确定融合插补量;基于所述融合插补量和所述机械臂在所述目标自由度上的当前位姿,确定目标位姿;根据所述目标位姿控制所述机械臂在所述目标自由度上的运动。本申请能够简化对机械臂的运动数据设置,提升机械臂面对复杂工作场景的应对能力。
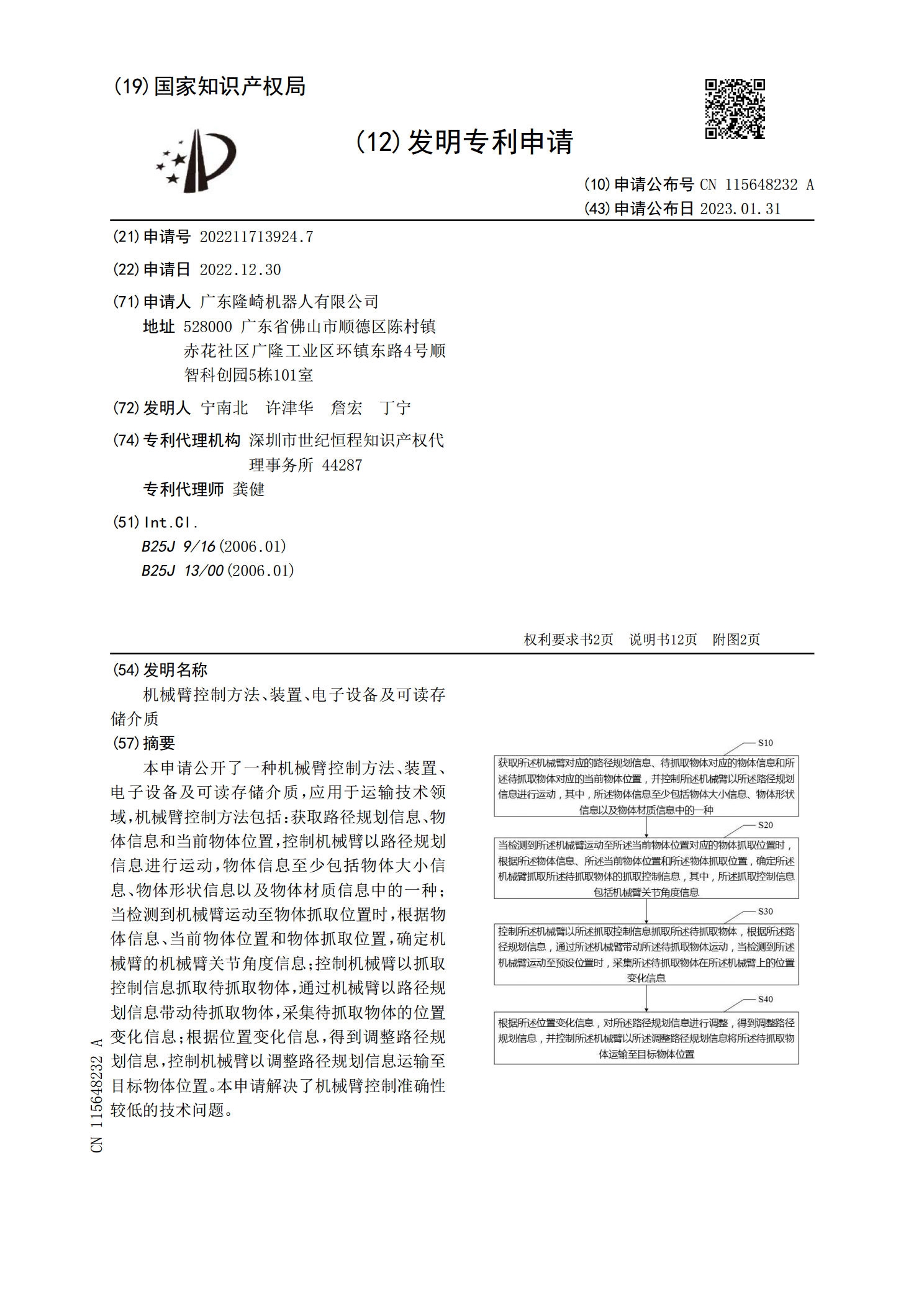
机械臂控制方法、装置、电子设备及可读存储介质.pdf
本申请公开了一种机械臂控制方法、装置、电子设备及可读存储介质,应用于运输技术领域,机械臂控制方法包括:获取路径规划信息、物体信息和当前物体位置,控制机械臂以路径规划信息进行运动,物体信息至少包括物体大小信息、物体形状信息以及物体材质信息中的一种;当检测到机械臂运动至物体抓取位置时,根据物体信息、当前物体位置和物体抓取位置,确定机械臂的机械臂关节角度信息;控制机械臂以抓取控制信息抓取待抓取物体,通过机械臂以路径规划信息带动待抓取物体,采集待抓取物体的位置变化信息;根据位置变化信息,得到调整路径规划信息,控制
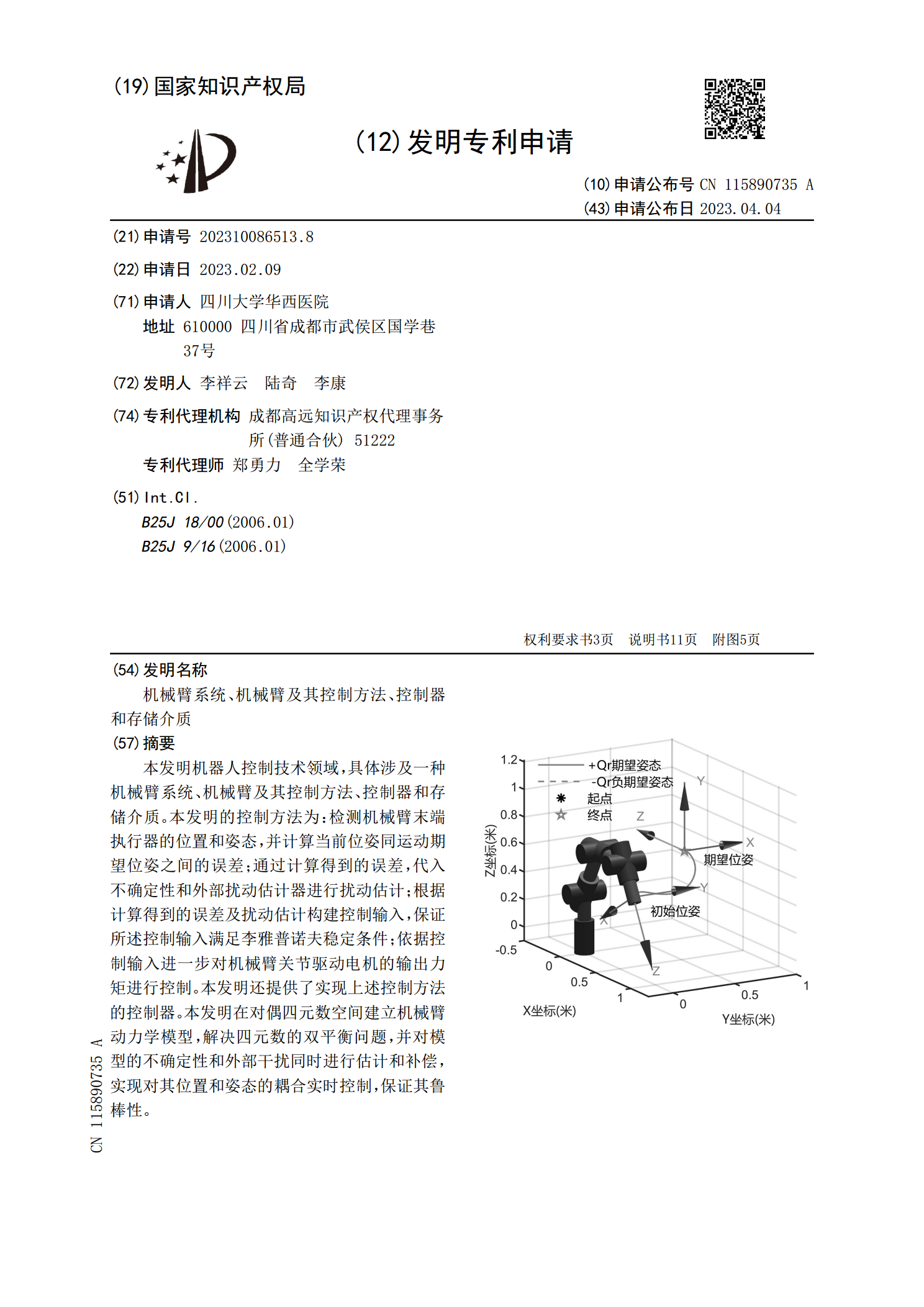
机械臂系统、机械臂及其控制方法、控制器和存储介质.pdf
本发明机器人控制技术领域,具体涉及一种机械臂系统、机械臂及其控制方法、控制器和存储介质。本发明的控制方法为:检测机械臂末端执行器的位置和姿态,并计算当前位姿同运动期望位姿之间的误差;通过计算得到的误差,代入不确定性和外部扰动估计器进行扰动估计;根据计算得到的误差及扰动估计构建控制输入,保证所述控制输入满足李雅普诺夫稳定条件;依据控制输入进一步对机械臂关节驱动电机的输出力矩进行控制。本发明还提供了实现上述控制方法的控制器。本发明在对偶四元数空间建立机械臂动力学模型,解决四元数的双平衡问题,并对模型的不确定性