
一种车辆轨迹控制方法.pdf

贤惠****66


1/5

2/5

3/5

4/5

5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种车辆轨迹控制方法.pdf
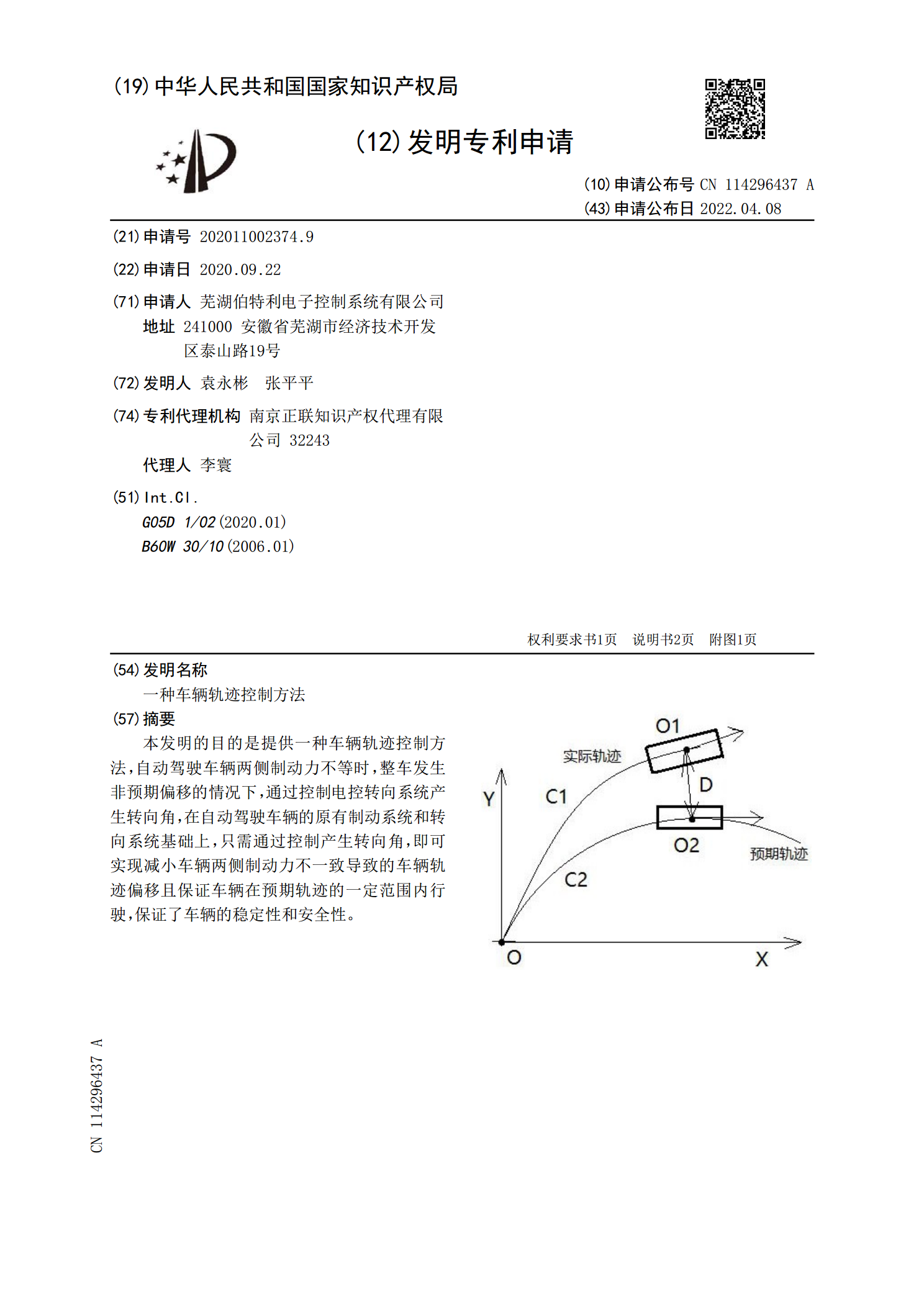
本发明的目的是提供一种车辆轨迹控制方法,自动驾驶车辆两侧制动力不等时,整车发生非预期偏移的情况下,通过控制电控转向系统产生转向角,在自动驾驶车辆的原有制动系统和转向系统基础上,只需通过控制产生转向角,即可实现减小车辆两侧制动力不一致导致的车辆轨迹偏移且保证车辆在预期轨迹的一定范围内行驶,保证了车辆的稳定性和安全性。

一种基于车辆轨迹预测的车辆控制的方法及系统.pdf
本申请公开了一种基于车辆轨迹预测的车辆控制的方法及系统,用于减少车辆追尾事故的发生。本申请方法包括:接收车载检测单元发送的检测结果,所述检测结果为车载检测单元对目标车辆预设范围内的其他车辆的行驶轨迹进行实时检测得到的结果;将所述检测结果与预存的车辆行驶轨迹模型进行对比,得到对比结果;当通过所述对比结果确定所述其他车辆有变道倾向时,发出预先设置的控制信号,所述控制信号包括减速信号,以提示车主控制所述目标车辆根据所述控制信号动作。

一种运动轨迹拟合方法、控制器及车辆.pdf
本发明提供了一种运动轨迹拟合方法、控制器及车辆,属于运动轨迹拟合技术领域。该方法包括:获取m个数据点(F<base:Sub>i</base:Sub>,t<base:Sub>i</base:Sub>),并将m个数据点分为n段,t<base:Sub>i</base:Sub>为第i个时间点,F<base:Sub>i</base:Sub>为目标参数;用t的多次多项式表示第j段数据对应的拟合的目标参数F<base:Sub>j</base:Sub>(t);以F<base:Sub>j</base:Sub>(t<base

一种车辆轨迹识别系统及车辆轨迹识别的方法.pdf
(19)中华人民共和国国家知识产权局(12)发明专利说明书(10)申请公布号CN101958046A(43)申请公布日2011.01.26(21)申请号CN201010291799.6(22)申请日2010.09.26(71)申请人隋亚刚;李志恒;尹胜超;苏岳龙地址100037北京市西城区阜成门北大街1号(72)发明人隋亚刚李志恒苏岳龙尹胜超李力(74)专利代理机构北京三聚阳光知识产权代理有限公司代理人张杰(51)Int.CIG08G1/017G06K9/00权利要求说明书说明书幅图(54)发明名称一种车

一种车辆轨迹处理方法.pdf
本发明实施例涉及一种车辆轨迹处理方法,所述方法包括:第一服务器接收车辆数据包并保存;若当前数据包类型为第一类型,则进行子区域注册车辆识别生成第一识别结果;若当前数据包类型为第二类型,则进行车辆道路违规行为识别处理生成第二识别结果;当第一识别结果不为注册车辆或第二识别结果不为合规时,进行车辆轨迹分析生成第一车辆轨迹;并进行AR地图处理生成第一AR地图;并在第一AR地图上对第一车辆轨迹进行预警处理。通过本发明可以对封闭区域内进行分片区的车辆准入管理,可以对行驶或静止的车辆是否存在超速、逆行、压线、违停等情况进