
多相机系统校准方法、装置、系统、电子设备及存储介质.pdf

一只****ua

1/10
2/10
3/10
4/10
5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共23页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
多相机系统校准方法、装置、系统、电子设备及存储介质.pdf
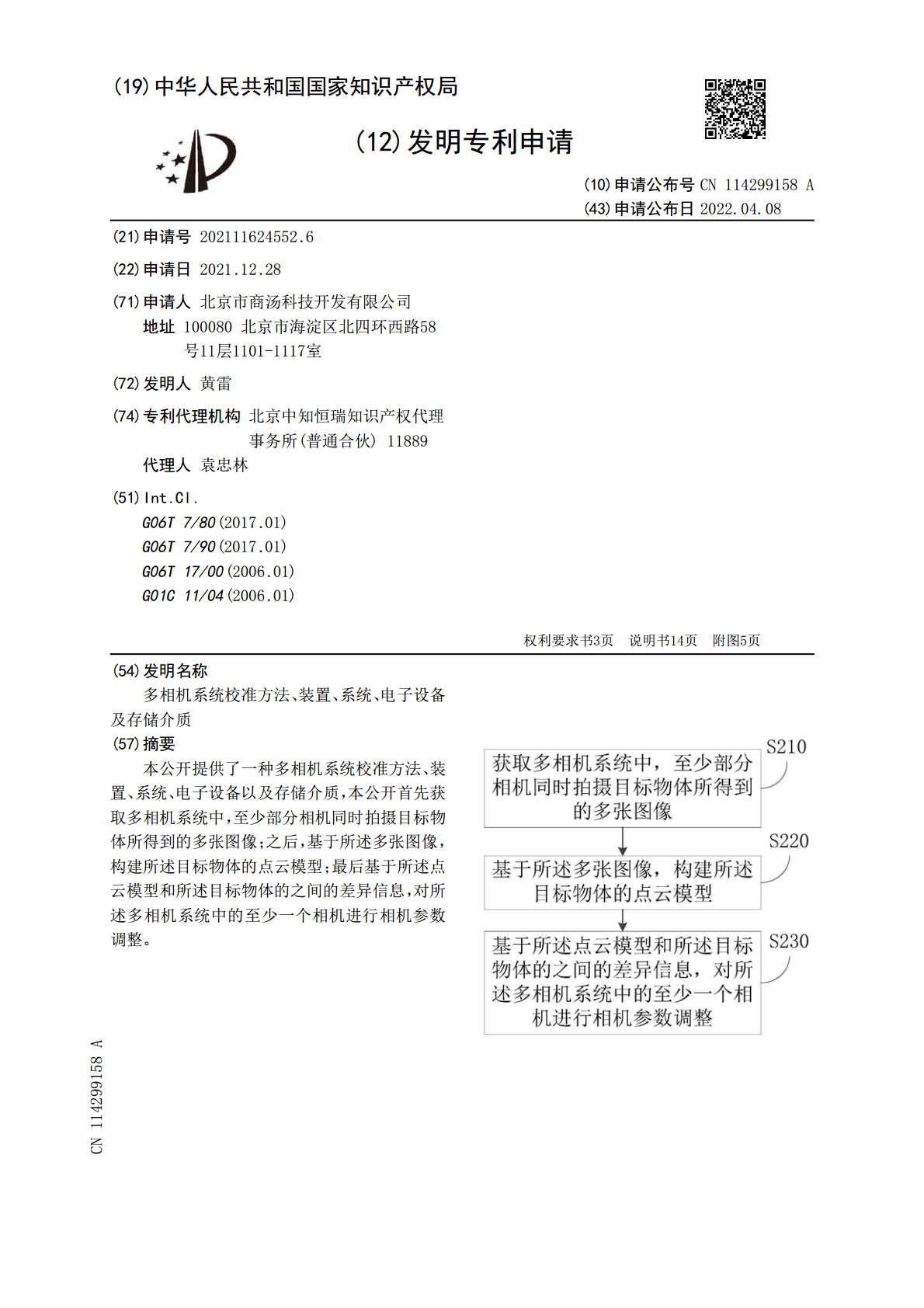
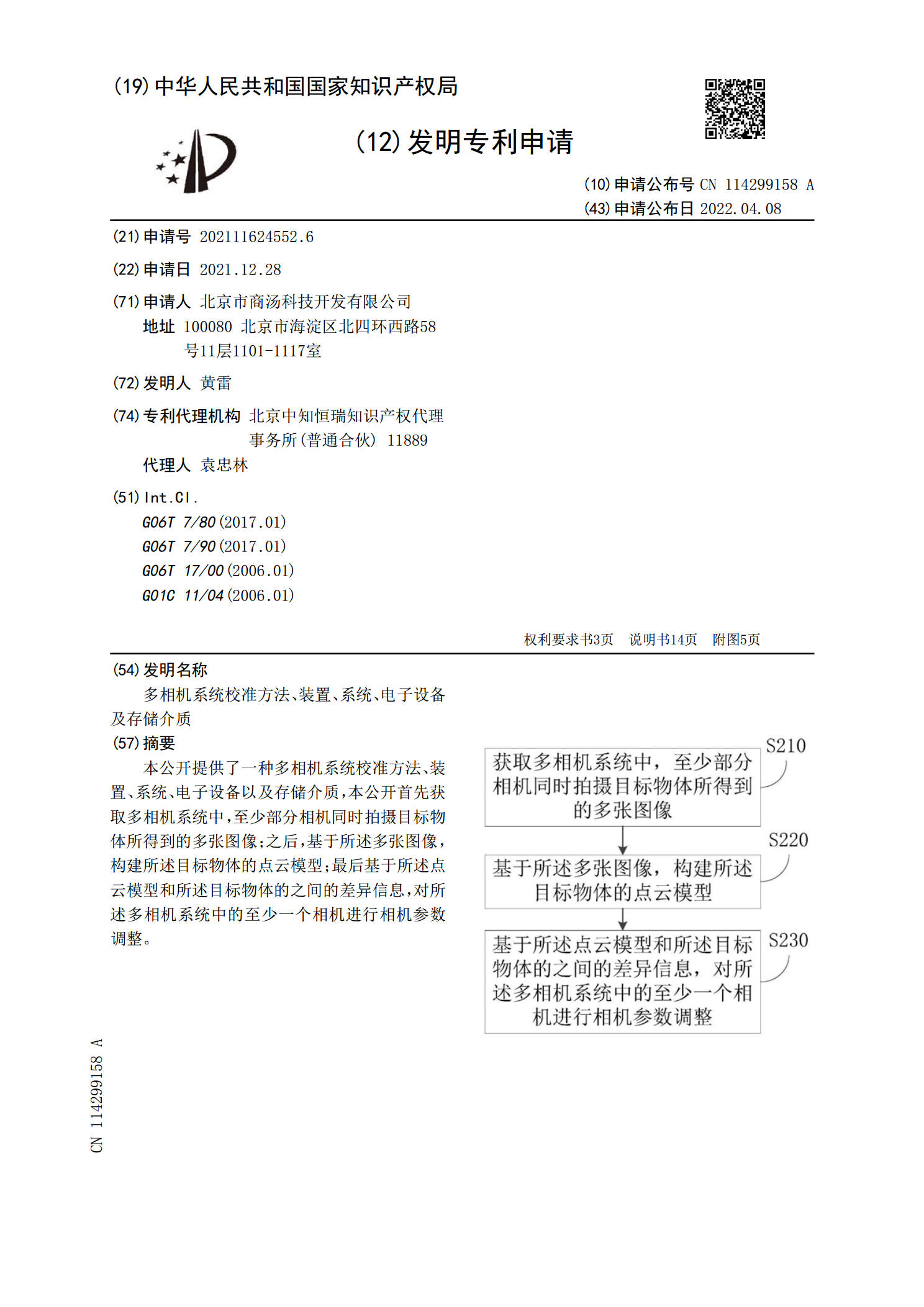
本公开提供了一种多相机系统校准方法、装置、系统、电子设备以及存储介质,本公开首先获取多相机系统中,至少部分相机同时拍摄目标物体所得到的多张图像;之后,基于所述多张图像,构建所述目标物体的点云模型;最后基于所述点云模型和所述目标物体的之间的差异信息,对所述多相机系统中的至少一个相机进行相机参数调整。
相机行偏差校准方法、装置、电子设备及存储介质.pdf
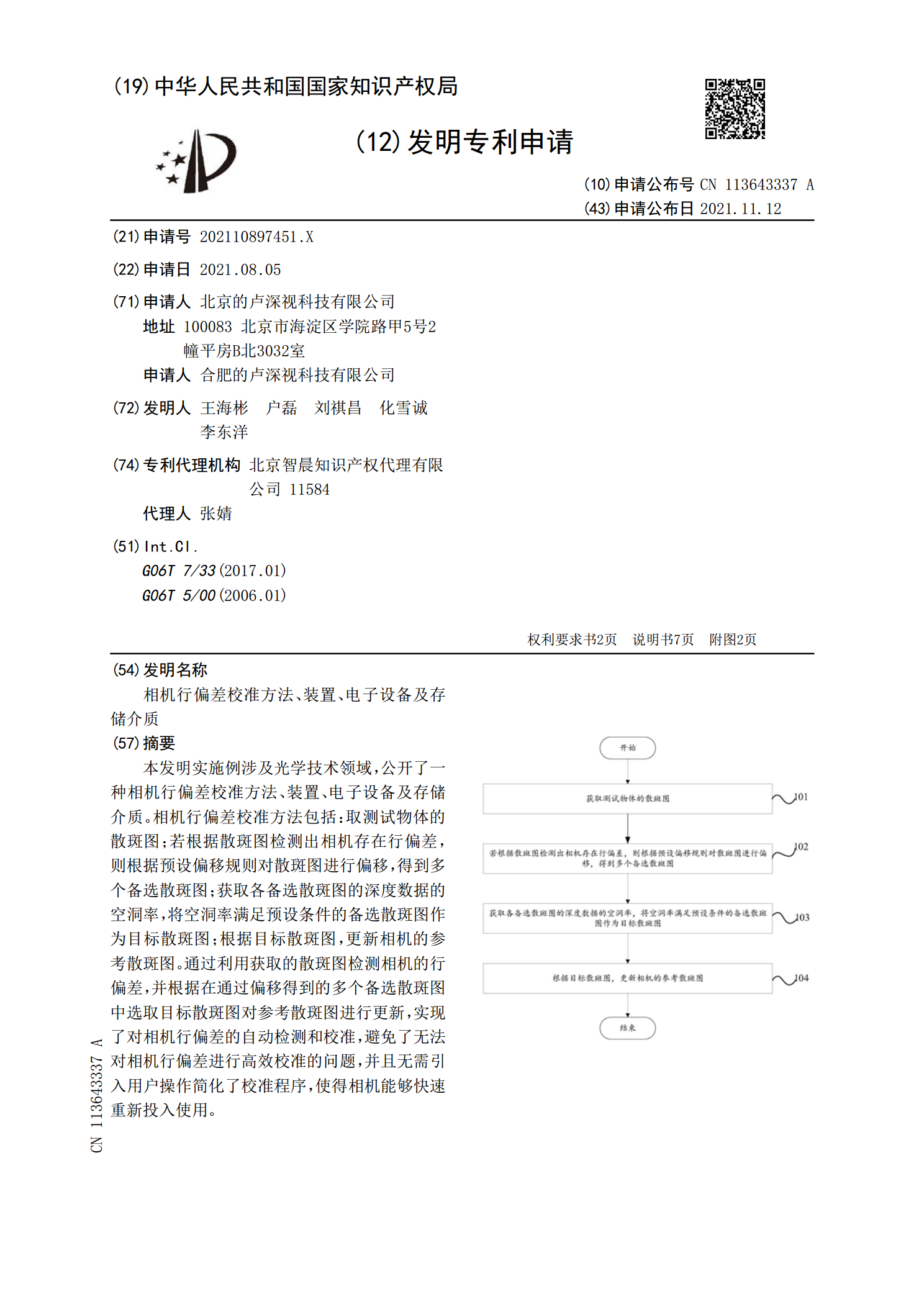
本发明实施例涉及光学技术领域,公开了一种相机行偏差校准方法、装置、电子设备及存储介质。相机行偏差校准方法包括:取测试物体的散斑图;若根据散斑图检测出相机存在行偏差,则根据预设偏移规则对散斑图进行偏移,得到多个备选散斑图;获取各备选散斑图的深度数据的空洞率,将空洞率满足预设条件的备选散斑图作为目标散斑图;根据目标散斑图,更新相机的参考散斑图。通过利用获取的散斑图检测相机的行偏差,并根据在通过偏移得到的多个备选散斑图中选取目标散斑图对参考散斑图进行更新,实现了对相机行偏差的自动检测和校准,避免了无法对相机行偏
阶梯信号校准方法、装置、系统、校准仪及存储介质.pdf
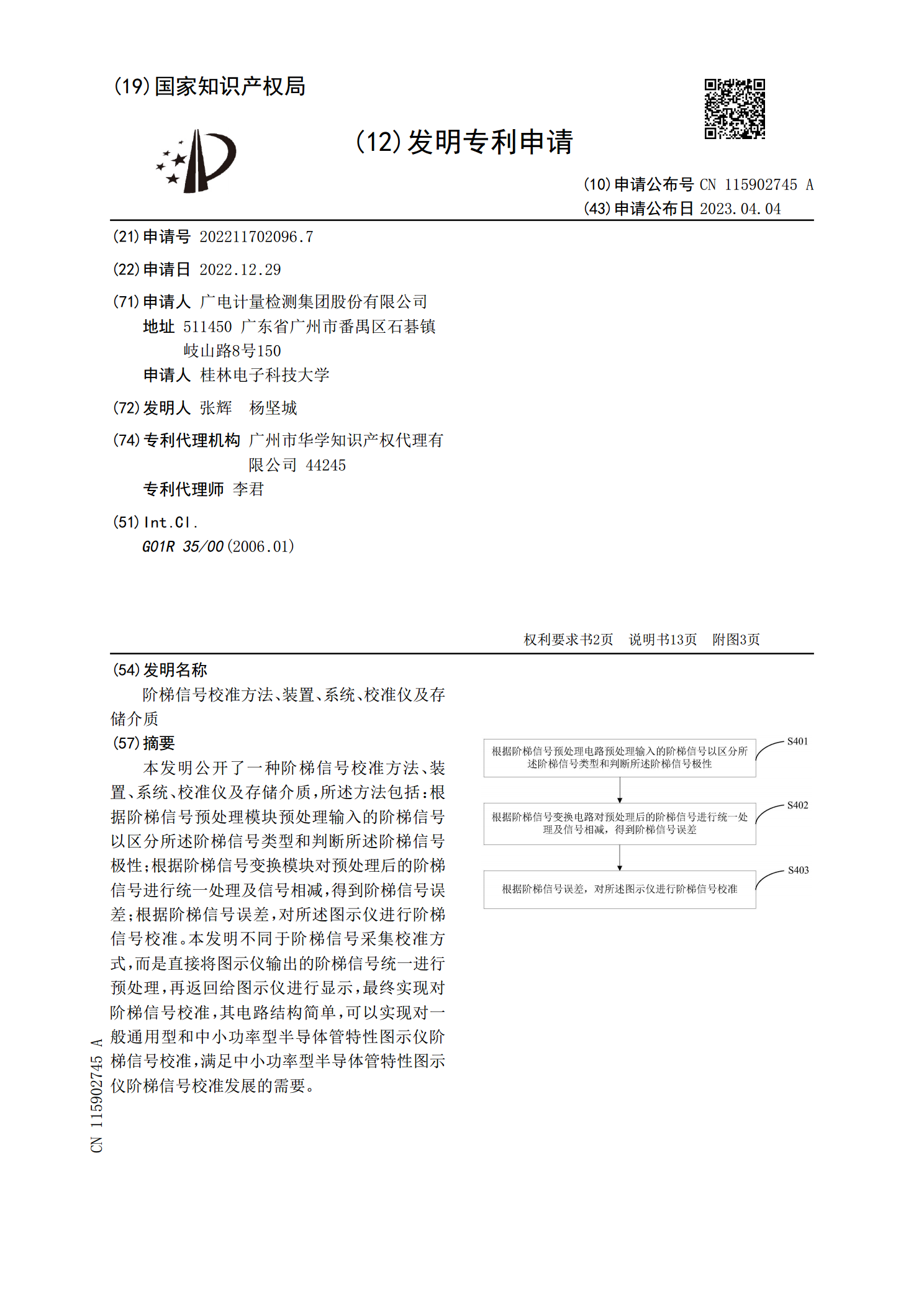
本发明公开了一种阶梯信号校准方法、装置、系统、校准仪及存储介质,所述方法包括:根据阶梯信号预处理模块预处理输入的阶梯信号以区分所述阶梯信号类型和判断所述阶梯信号极性;根据阶梯信号变换模块对预处理后的阶梯信号进行统一处理及信号相减,得到阶梯信号误差;根据阶梯信号误差,对所述图示仪进行阶梯信号校准。本发明不同于阶梯信号采集校准方式,而是直接将图示仪输出的阶梯信号统一进行预处理,再返回给图示仪进行显示,最终实现对阶梯信号校准,其电路结构简单,可以实现对一般通用型和中小功率型半导体管特性图示仪阶梯信号校准,满足中
相机倾斜校准方法、装置、设备及存储介质.pdf
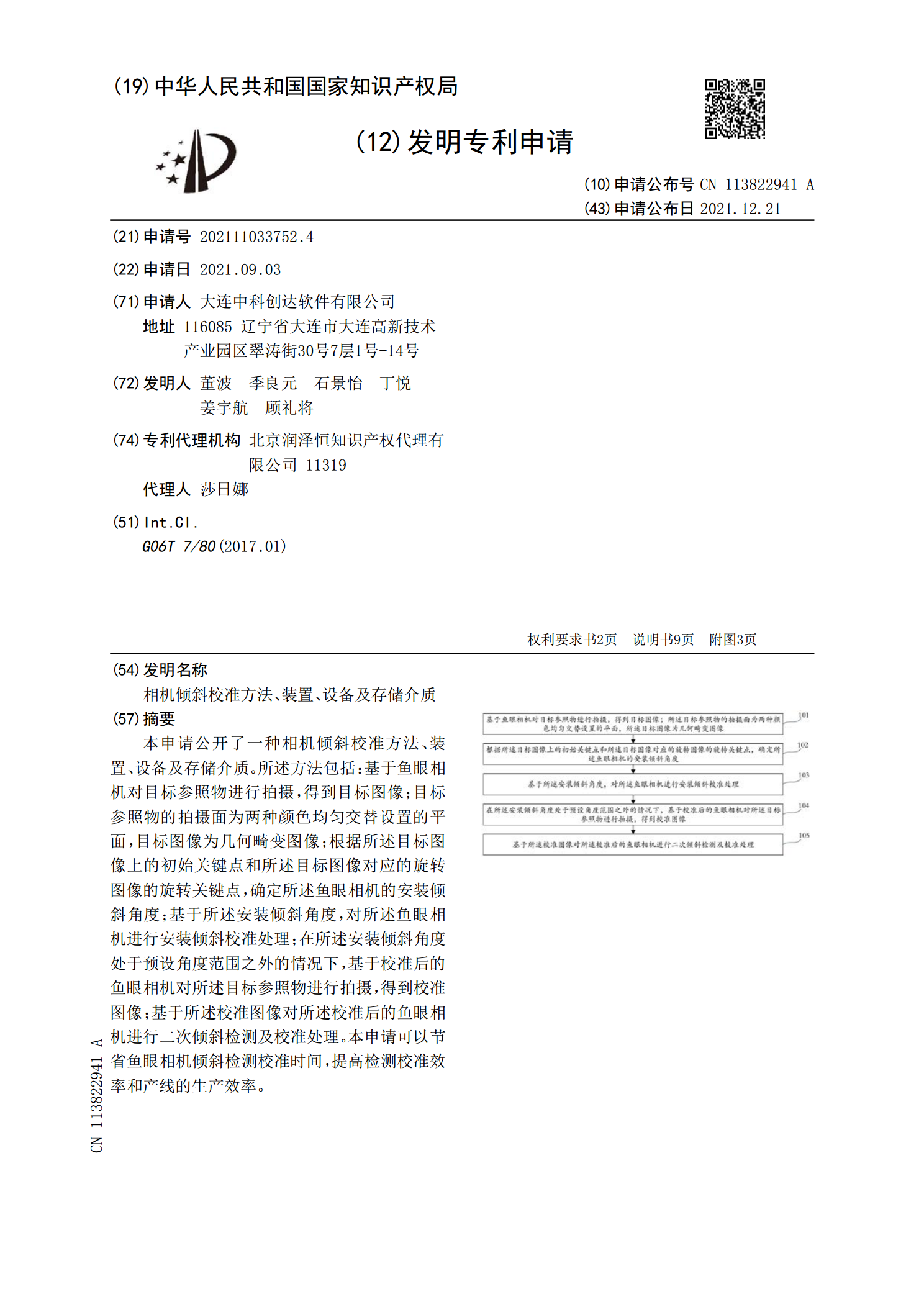
本申请公开了一种相机倾斜校准方法、装置、设备及存储介质。所述方法包括:基于鱼眼相机对目标参照物进行拍摄,得到目标图像;目标参照物的拍摄面为两种颜色均匀交替设置的平面,目标图像为几何畸变图像;根据所述目标图像上的初始关键点和所述目标图像对应的旋转图像的旋转关键点,确定所述鱼眼相机的安装倾斜角度;基于所述安装倾斜角度,对所述鱼眼相机进行安装倾斜校准处理;在所述安装倾斜角度处于预设角度范围之外的情况下,基于校准后的鱼眼相机对所述目标参照物进行拍摄,得到校准图像;基于所述校准图像对所述校准后的鱼眼相机进行二次倾斜
双目相机参数调整方法、装置、系统和存储介质.pdf
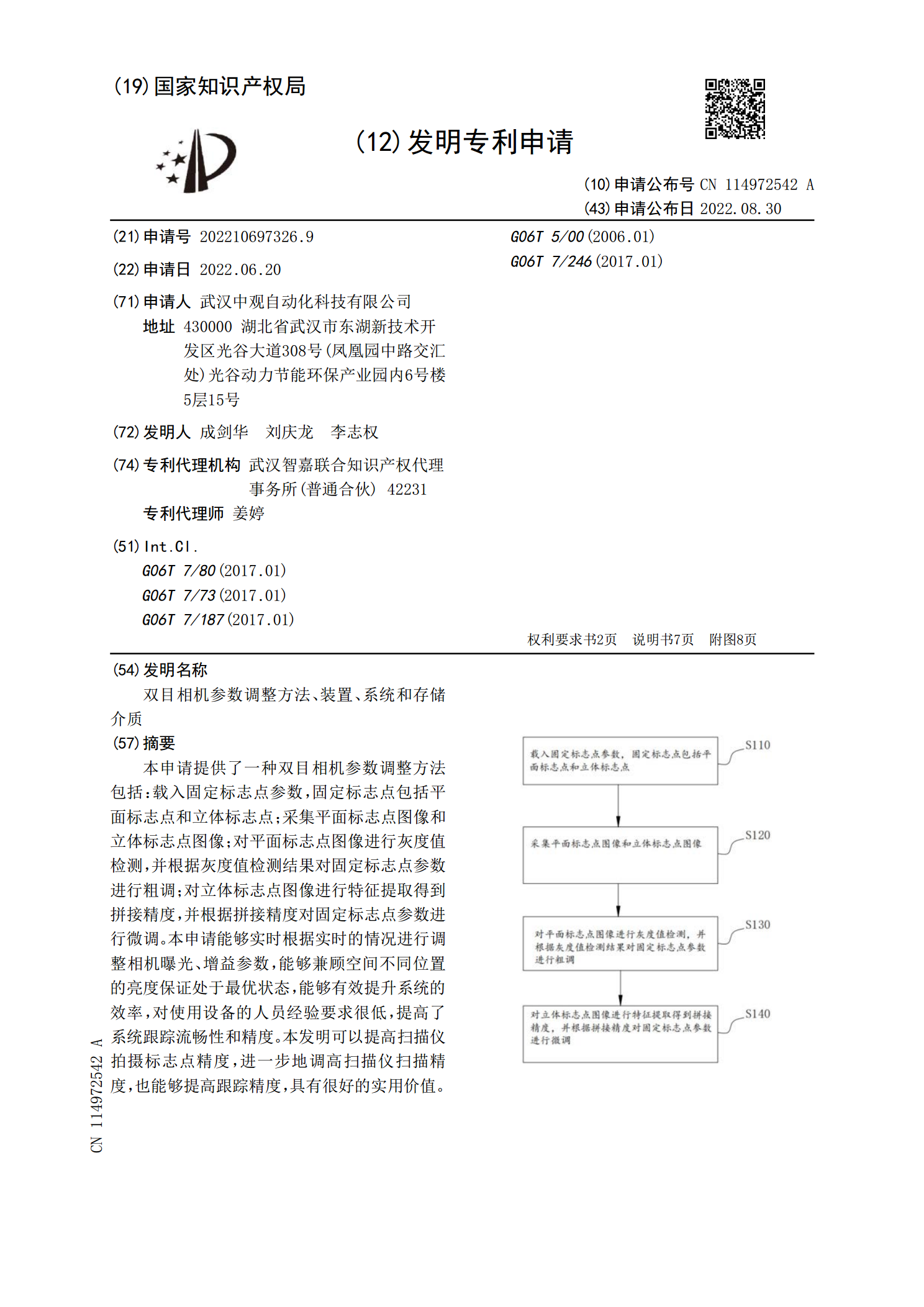
本申请提供了一种双目相机参数调整方法包括:载入固定标志点参数,固定标志点包括平面标志点和立体标志点;采集平面标志点图像和立体标志点图像;对平面标志点图像进行灰度值检测,并根据灰度值检测结果对固定标志点参数进行粗调;对立体标志点图像进行特征提取得到拼接精度,并根据拼接精度对固定标志点参数进行微调。本申请能够实时根据实时的情况进行调整相机曝光、增益参数,能够兼顾空间不同位置的亮度保证处于最优状态,能够有效提升系统的效率,对使用设备的人员经验要求很低,提高了系统跟踪流畅性和精度。本发明可以提高扫描仪拍摄标志点精