
用于多目标跟踪的方法及装置、存储介质及电子设备.pdf

论文****轩吖

1/10

2/10

3/10

4/10

5/10
6/10
7/10

8/10

9/10

10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
用于多目标跟踪的方法及装置、存储介质及电子设备.pdf
本公开提供了一种用于多目标跟踪的方法、装置、电子设备及存储介质,涉及图像处理技术领域。该方法包括:获取目标帧图像和目标帧图像之后一帧的第二图像;比对目标帧图像和第二图像,确定出现在目标帧图像中且未出现在第二图像中的目标对象;根据目标帧图像和第二图像,预测目标对象在第二图像中是否被遮挡;在预测出目标对象在第二图像中被遮挡的情况下,通过卡尔曼滤波运动模型确定目标对象在第二图像中的预测位置。该方法可以对于未匹配到目标的对象(即目标对象),可以进一步判断其是否被遮挡,而不是直接舍弃,减少由于漏检或短时遮挡等原因带

多目标跟踪方法、装置、电子设备及存储介质.pdf
本公开提供了一种多目标跟踪方法、装置、电子设备及存储介质,该多目标跟踪方法包括:对当前帧图像进行目标检测,得到检测出的至少一个第一目标物体的第一检测结果;提取所述第一目标物体的外观特征向量;计算所述第一目标物体的外观特征向量,与所述当前帧图像之前的至少一帧图像中检测出的各目标物体的外观特征向量之间的相似度;基于所述相似度,确定针对所述第一目标物体的目标跟踪结果;所述目标跟踪结果用于反映所述第一目标物体在所述当前帧图像以及所述多帧图像中的检测结果。本申请实施例,能够提高多目标跟踪的稳定性和精度。
多目标跟踪方法、装置、电子设备和存储介质.pdf
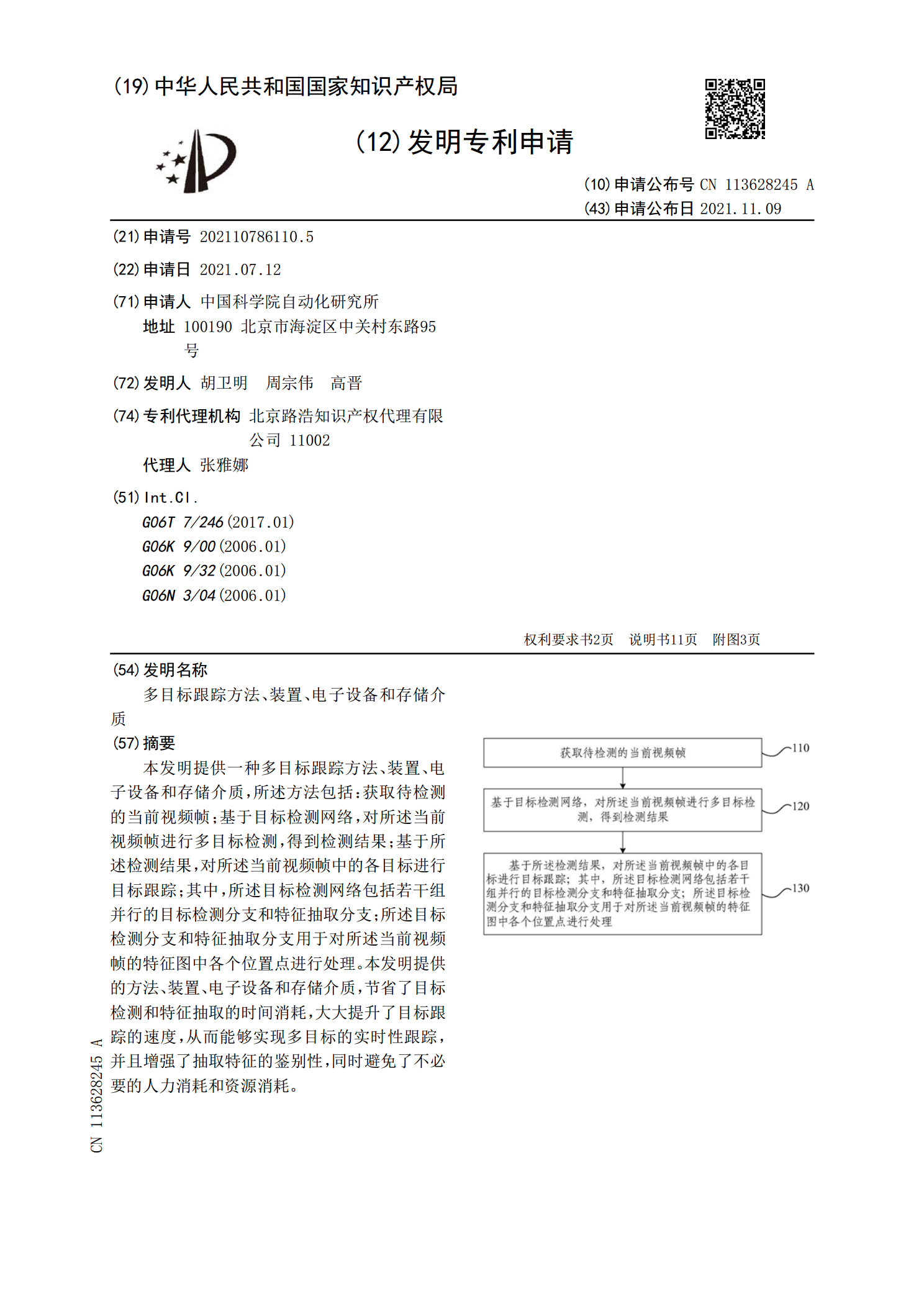
本发明提供一种多目标跟踪方法、装置、电子设备和存储介质,所述方法包括:获取待检测的当前视频帧;基于目标检测网络,对所述当前视频帧进行多目标检测,得到检测结果;基于所述检测结果,对所述当前视频帧中的各目标进行目标跟踪;其中,所述目标检测网络包括若干组并行的目标检测分支和特征抽取分支;所述目标检测分支和特征抽取分支用于对所述当前视频帧的特征图中各个位置点进行处理。本发明提供的方法、装置、电子设备和存储介质,节省了目标检测和特征抽取的时间消耗,大大提升了目标跟踪的速度,从而能够实现多目标的实时性跟踪,并且增强了

多目标跟踪的方法、装置、设备及存储介质.pdf
本申请公开了一种多目标跟踪的方法、装置、设备及存储介质。具体包括:获取待测路段内的图像信息和雷达信息;根据图像信息、雷达信息和预设的置信度门限,利用预设的多目标检测算法,确定第一多目标检测信息;利用预设的第一关联算法,关联第一多目标检测信息和雷达信息,得到第一多目标关联信息;利用预设的第二关联算法,关联所述第一多目标关联信息、第一目标跟踪信息和第二目标跟踪信息,得到待测路段内的目标交通信息。根据本申请实施例,可以有效减少单一传感器失效引发的漏检等问题,提升多目标检测的性能,进而保证目标跟踪性能。
用于制热的方法及装置、电子设备、存储介质.pdf
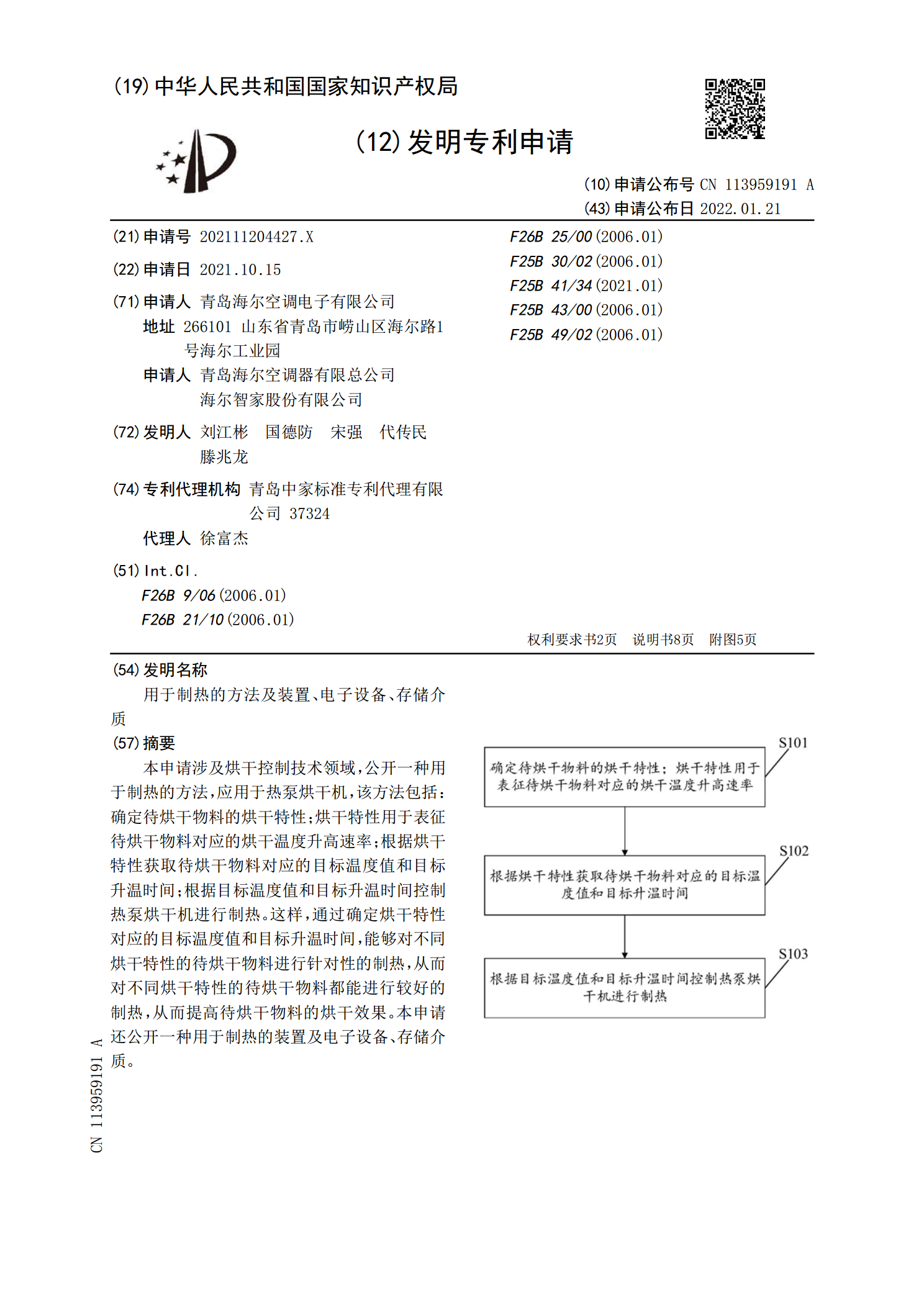
本申请涉及烘干控制技术领域,公开一种用于制热的方法,应用于热泵烘干机,该方法包括:确定待烘干物料的烘干特性;烘干特性用于表征待烘干物料对应的烘干温度升高速率;根据烘干特性获取待烘干物料对应的目标温度值和目标升温时间;根据目标温度值和目标升温时间控制热泵烘干机进行制热。这样,通过确定烘干特性对应的目标温度值和目标升温时间,能够对不同烘干特性的待烘干物料进行针对性的制热,从而对不同烘干特性的待烘干物料都能进行较好的制热,从而提高待烘干物料的烘干效果。本申请还公开一种用于制热的装置及电子设备、存储介质。