
协同搬运方法、装置及可读存储介质和电子设备.pdf

曦晨****22


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共27页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

协同搬运方法、装置及可读存储介质和电子设备.pdf
本发明实施例提出协同搬运方法、装置及可读存储介质和电子设备。方法包括:确定被指派了协同搬运任务的机器人编组的期望队形信息,其中,所述机器人编组包含至少两个移动机器人,所述期望队形信息包含所述机器人编组中的每个移动机器人相对于所述协同搬运任务指定的目标货物的期望相对位置;获取所述目标货物的期望搬运轨迹和在期望搬运轨迹上的期望航向;利用所述期望队形信息以及所述期望搬运轨迹和所述在期望搬运轨迹上的期望航向,确定所述每个移动机器人在协同搬运过程中的行进方向和行进速度,以使所述目标货物在所述协同搬运过程中的移动轨迹

搬运方法、搬运装置、划片机、可读存储介质以及电子设备.pdf
本发明公开了一种搬运方法、搬运装置、划片机、可读存储介质以及电子设备,该搬运方法用于划片机,所述划片机包括搬运机构、导轨和承载台,所述承载台位于所述导轨的下方,该搬运方法包括:步骤S1、控制所述搬运机构吸附所述导轨上的工件后向上移动预设距离,并在吸附所述工件以及上移过程中实时监测所述搬运机构吸附所述工件的吸附力,其中,所述导轨处于支撑所述工件的承载位置;步骤S2、控制所述导轨从所述承载位置切换至避让位置;控制所述搬运机构将所述工件下移并放置在所述承载台上。通过对搬运过程中优化,能够减少工件掉落导致损坏的情
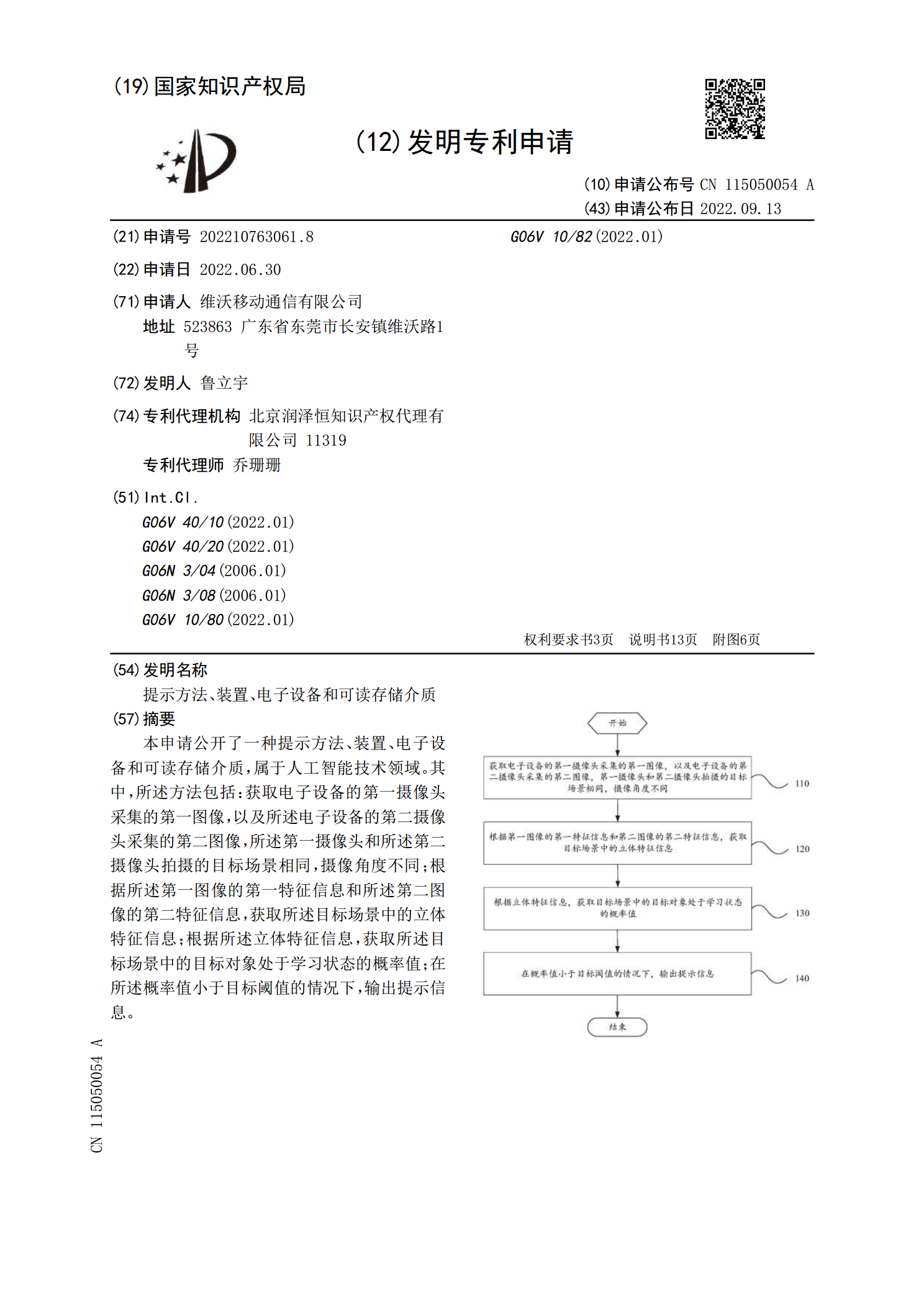
提示方法、装置、电子设备和可读存储介质.pdf
本申请公开了一种提示方法、装置、电子设备和可读存储介质,属于人工智能技术领域。其中,所述方法包括:获取电子设备的第一摄像头采集的第一图像,以及所述电子设备的第二摄像头采集的第二图像,所述第一摄像头和所述第二摄像头拍摄的目标场景相同,摄像角度不同;根据所述第一图像的第一特征信息和所述第二图像的第二特征信息,获取所述目标场景中的立体特征信息;根据所述立体特征信息,获取所述目标场景中的目标对象处于学习状态的概率值;在所述概率值小于目标阈值的情况下,输出提示信息。
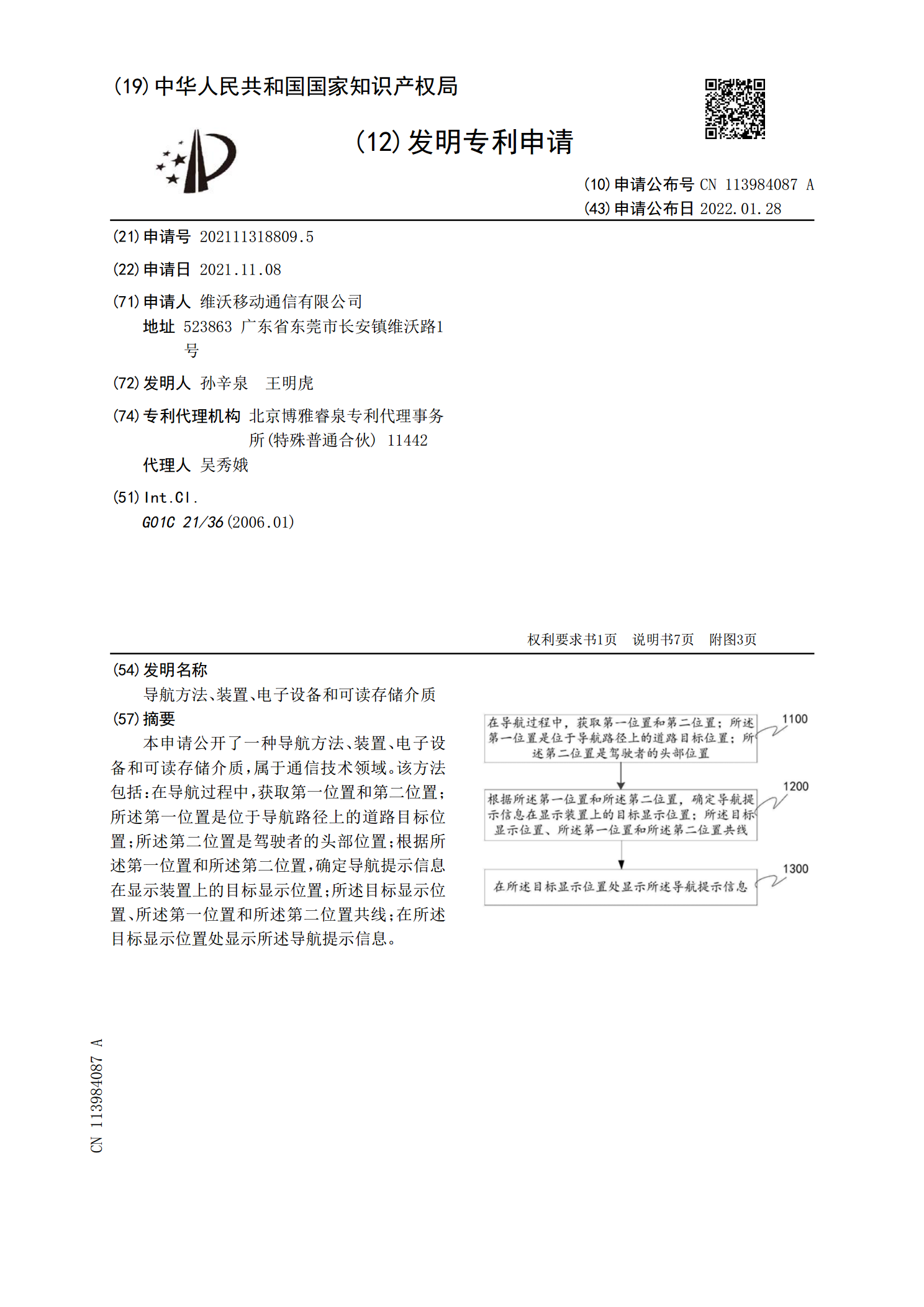
导航方法、装置、电子设备和可读存储介质.pdf
本申请公开了一种导航方法、装置、电子设备和可读存储介质,属于通信技术领域。该方法包括:在导航过程中,获取第一位置和第二位置;所述第一位置是位于导航路径上的道路目标位置;所述第二位置是驾驶者的头部位置;根据所述第一位置和所述第二位置,确定导航提示信息在显示装置上的目标显示位置;所述目标显示位置、所述第一位置和所述第二位置共线;在所述目标显示位置处显示所述导航提示信息。
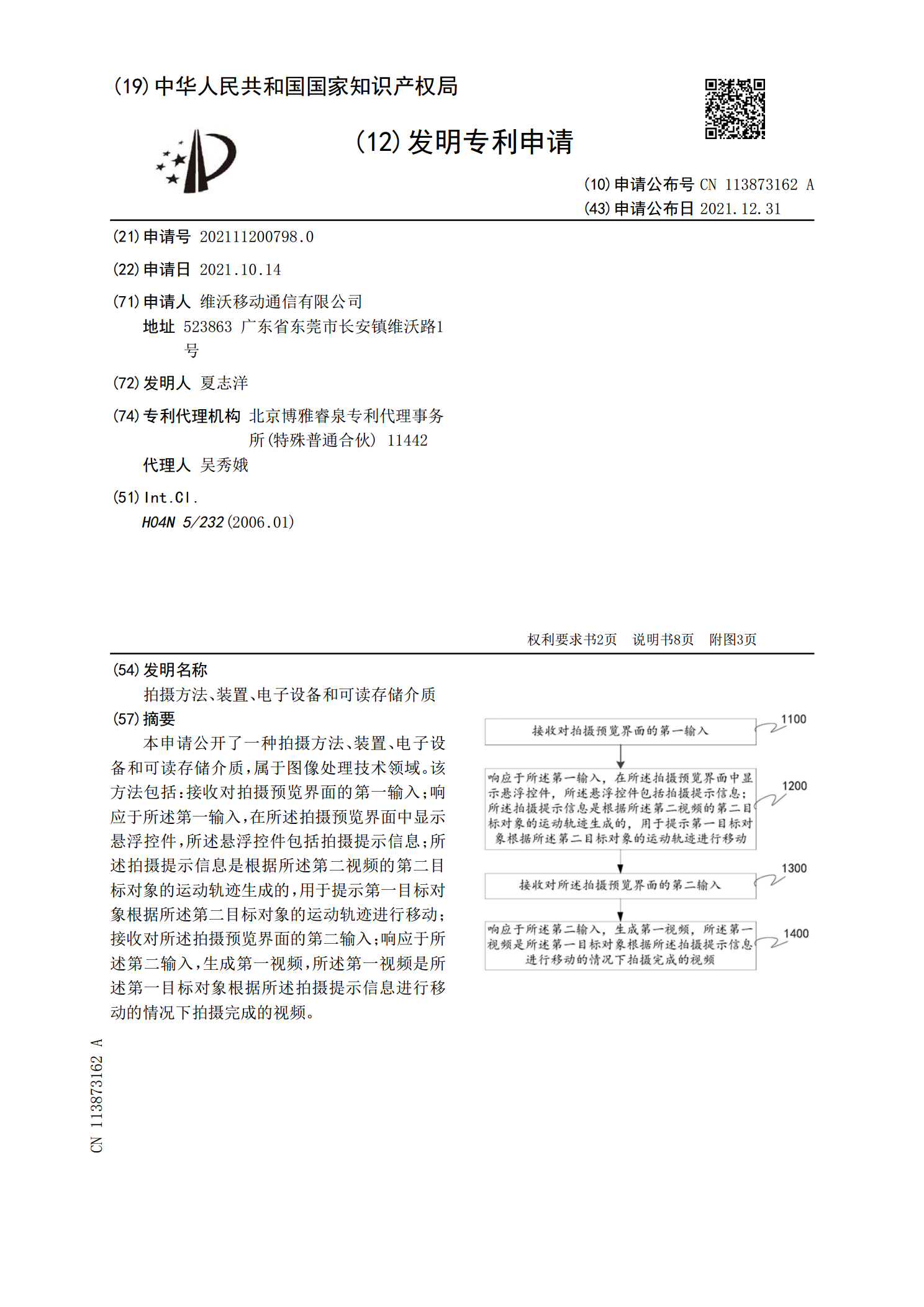
拍摄方法、装置、电子设备和可读存储介质.pdf
本申请公开了一种拍摄方法、装置、电子设备和可读存储介质,属于图像处理技术领域。该方法包括:接收对拍摄预览界面的第一输入;响应于所述第一输入,在所述拍摄预览界面中显示悬浮控件,所述悬浮控件包括拍摄提示信息;所述拍摄提示信息是根据所述第二视频的第二目标对象的运动轨迹生成的,用于提示第一目标对象根据所述第二目标对象的运动轨迹进行移动;接收对所述拍摄预览界面的第二输入;响应于所述第二输入,生成第一视频,所述第一视频是所述第一目标对象根据所述拍摄提示信息进行移动的情况下拍摄完成的视频。