
曲率纠偏方法、自动纠偏系统和高精度地图云.pdf

Do****76

1/10
2/10
3/10
4/10
5/10
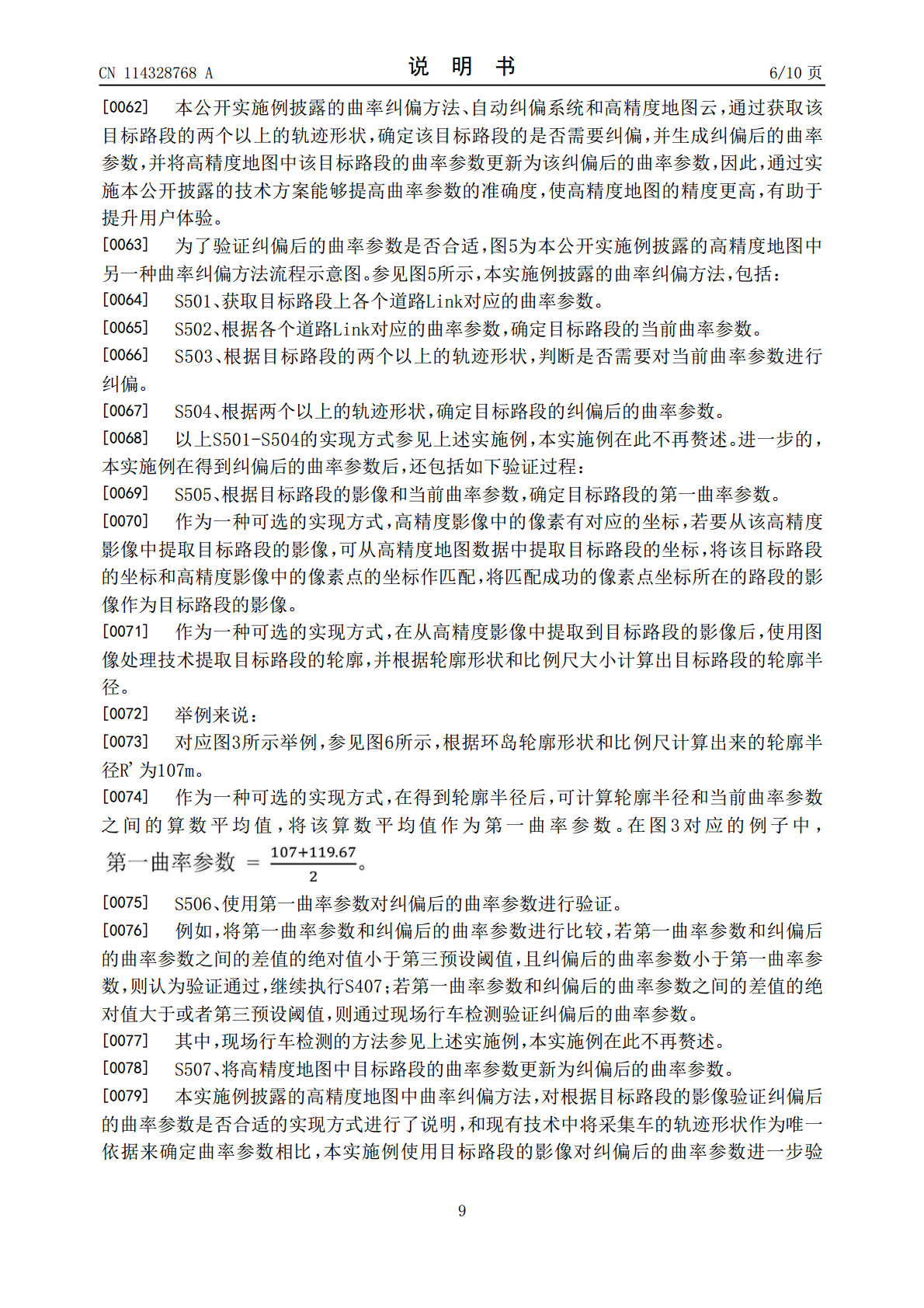
6/10
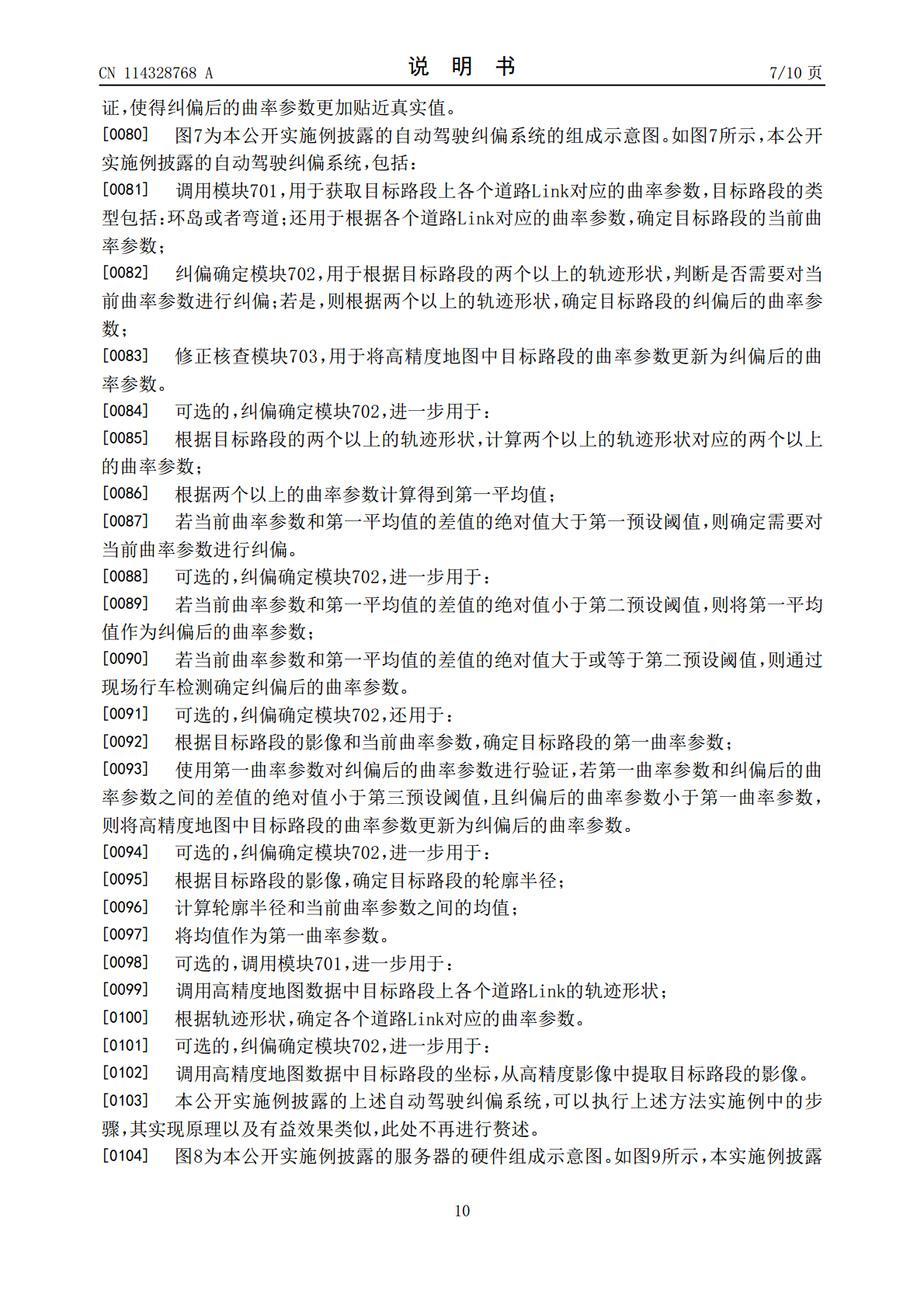
7/10
8/10
9/10
10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
曲率纠偏方法、自动纠偏系统和高精度地图云.pdf
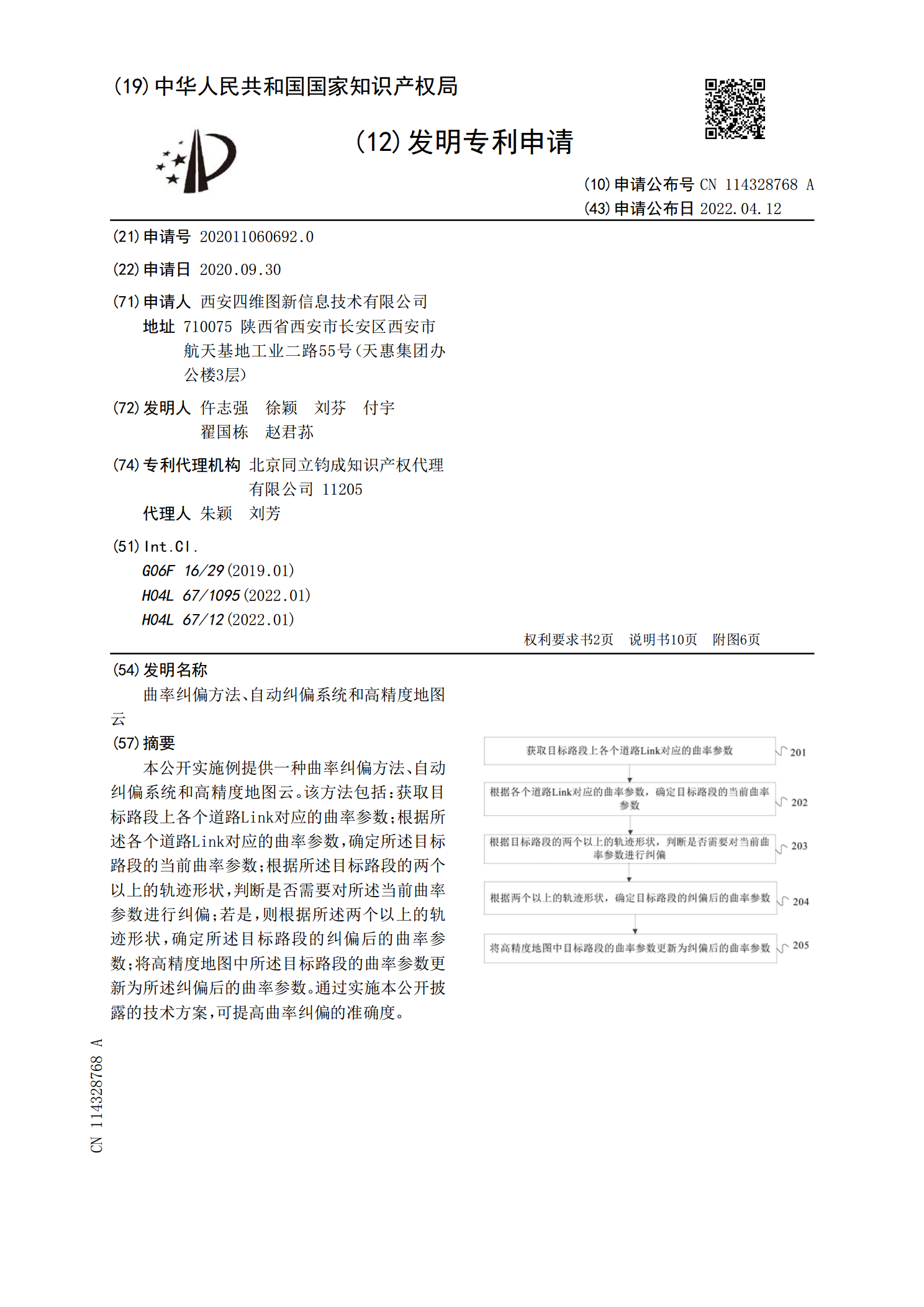
本公开实施例提供一种曲率纠偏方法、自动纠偏系统和高精度地图云。该方法包括:获取目标路段上各个道路Link对应的曲率参数;根据所述各个道路Link对应的曲率参数,确定所述目标路段的当前曲率参数;根据所述目标路段的两个以上的轨迹形状,判断是否需要对所述当前曲率参数进行纠偏;若是,则根据所述两个以上的轨迹形状,确定所述目标路段的纠偏后的曲率参数;将高精度地图中所述目标路段的曲率参数更新为所述纠偏后的曲率参数。通过实施本公开披露的技术方案,可提高曲率纠偏的准确度。

起重机大车BPS自动纠偏方法和纠偏系统.pdf
本发明涉及一种起重机大车BPS自动纠偏方法和纠偏系统,分别在左、右两侧导轨上各设置一条条码带,并分别在车架上安装有相应的条形码阅读器,控制单元适时采集并比较两侧阅读器所读取条形码的数值,判断大车左、右两侧的驱动轮行程是否同步,当两侧驱动轮不同步时,控制单元通过降低超前一侧驱动轮转速或者增加落后一侧驱动轮转速的方式自动调节两侧驱动轮,保持两驱动轮位于同一条形码段。本发明能够准确及时地判断两侧行走轮是否偏向或偏向程度,确保控制电路能够及时做出调整驱动电机的转速的指令,从而具有更高的可靠性。由于起重机大车走偏检
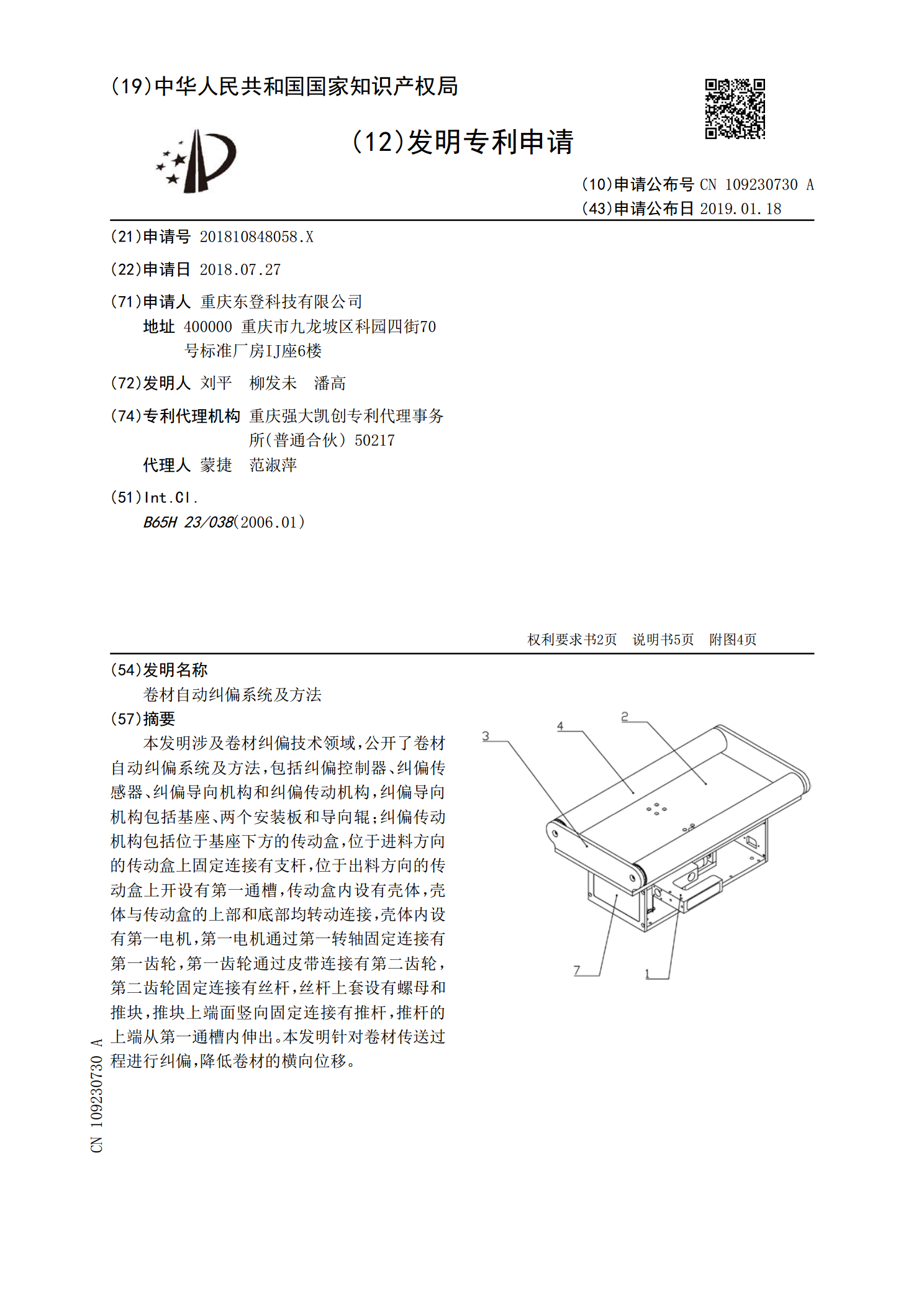
卷材自动纠偏系统及方法.pdf
本发明涉及卷材纠偏技术领域,公开了卷材自动纠偏系统及方法,包括纠偏控制器、纠偏传感器、纠偏导向机构和纠偏传动机构,纠偏导向机构包括基座、两个安装板和导向辊;纠偏传动机构包括位于基座下方的传动盒,位于进料方向的传动盒上固定连接有支杆,位于出料方向的传动盒上开设有第一通槽,传动盒内设有壳体,壳体与传动盒的上部和底部均转动连接,壳体内设有第一电机,第一电机通过第一转轴固定连接有第一齿轮,第一齿轮通过皮带连接有第二齿轮,第二齿轮固定连接有丝杆,丝杆上套设有螺母和推块,推块上端面竖向固定连接有推杆,推杆的上端从第一
非接触宽范围边缘自动纠偏系统与纠偏方法.pdf
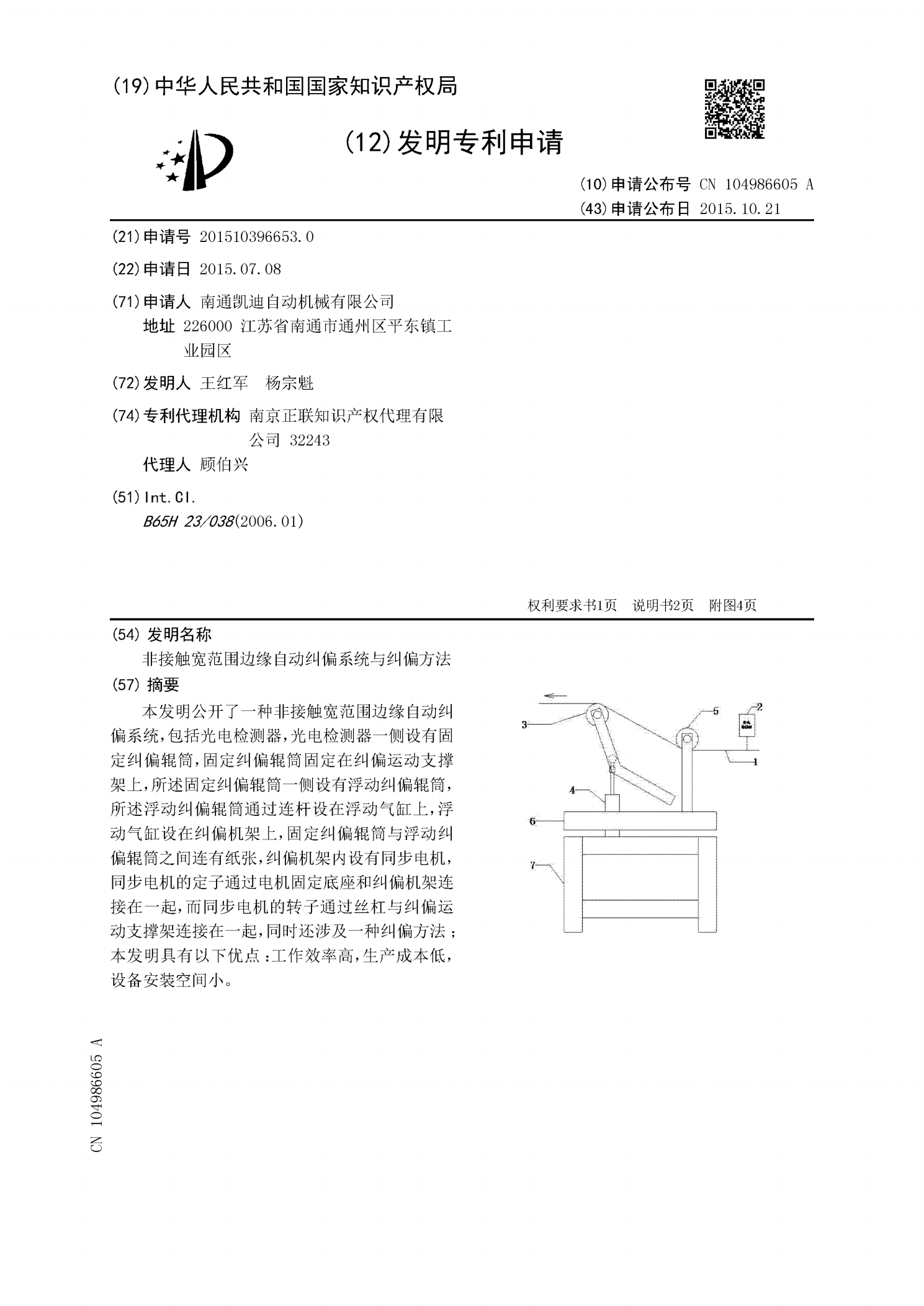
本发明公开了一种非接触宽范围边缘自动纠偏系统,包括光电检测器,光电检测器一侧设有固定纠偏辊筒,固定纠偏辊筒固定在纠偏运动支撑架上,所述固定纠偏辊筒一侧设有浮动纠偏辊筒,所述浮动纠偏辊筒通过连杆设在浮动气缸上,浮动气缸设在纠偏机架上,固定纠偏辊筒与浮动纠偏辊筒之间连有纸张,纠偏机架内设有同步电机,同步电机的定子通过电机固定底座和纠偏机架连接在一起,而同步电机的转子通过丝杠与纠偏运动支撑架连接在一起,同时还涉及一种纠偏方法;本发明具有以下优点:工作效率高,生产成本低,设备安装空间小。

自动跟随纠偏系统.pdf
本发明所设计的自动跟随纠偏系统,包括纠偏台,所述的纠偏台包括第一边架和第二边架,在第一边架上设有动力装置,动力装置的输出轴上设有若干个第一锥形齿轮,所述的辊杆的一端设有第二锥形齿轮并与第一锥形齿轮啮合形成传动连接,所述的第二边架上水平设置有纠偏带,所述的纠偏带通过主动轮和从动轮设置在第二边架上,且所述的辊杆与横杆之间成夹角设置,保证滚轮的运行方向向第二边架倾斜,所述纠偏带的运行方向与滚轮的运行方向一致。这种结构的特点是利用运输过程中,滚轮方向的偏斜使得玻璃片跑向纠偏带,再利用纠偏带的运动带动玻璃片转向,最