
一种基于UWB和IMU的非视距误差补偿的室内定位方法及系统.pdf

念珊****写意


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共32页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于UWB和IMU的非视距误差补偿的室内定位方法及系统.pdf
本发明公开了一种基于UWB和IMU的非视距误差补偿的室内定位方法,克服了现有技术中利用UWB和IMU进行室内定位时存在非视距误差的问题,包括下列步骤:将空旷的室内仓储环境划分为M个网格,在每个网格中进行数据信息的采集;在实际的室内仓储环境中,对AGV小车任一物流路径每一时刻进行数据信息采集;判断空旷的室内仓储环境和实际的室内仓储环境的一致性;根据判断结果,分情况计算k时刻待测目标的最终位置pos

非视距环境下基于UWB的室内动态目标定位.docx
非视距环境下基于UWB的室内动态目标定位标题:非视距环境下基于UWB的室内动态目标定位摘要:室内动态目标定位是无线传感网络领域的重要研究方向之一。在非视距环境下,由于信号衰减、反射和多径效应等因素的影响,传统的无线定位技术存在一定的局限性。Ultra-Wideband(UWB)技术以其高带宽、低功耗和高精度等特点成为非视距环境下室内动态目标定位的理想选择。本论文将介绍UWB技术的基本原理、目标定位算法以及UWB在非视距环境下的应用。1.引言室内动态目标定位是指在室内环境中对运动的目标进行精确定位的技术。它
一种基于RFID定位技术的定位误差补偿方法和系统.pdf
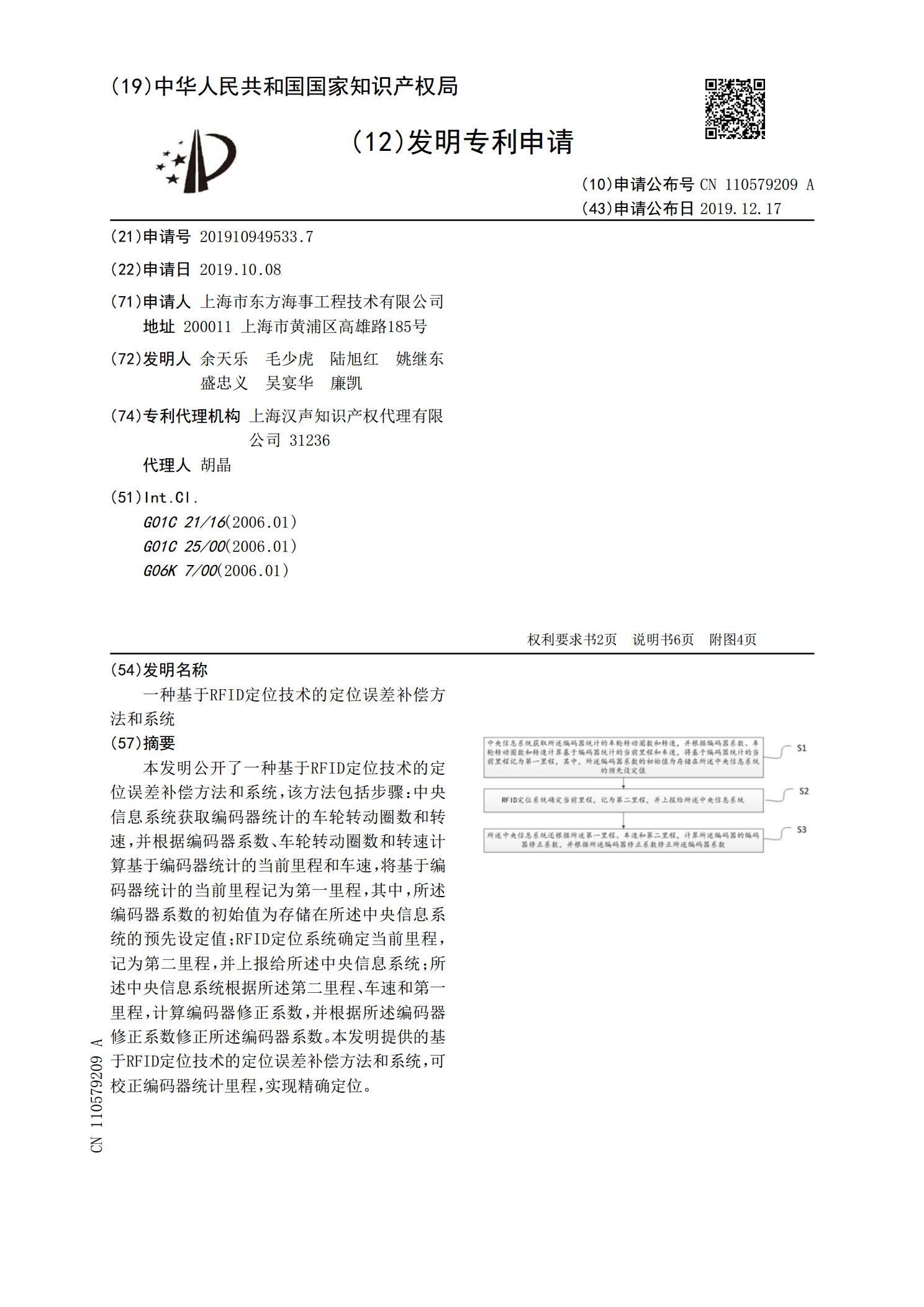
本发明公开了一种基于RFID定位技术的定位误差补偿方法和系统,该方法包括步骤:中央信息系统获取编码器统计的车轮转动圈数和转速,并根据编码器系数、车轮转动圈数和转速计算基于编码器统计的当前里程和车速,将基于编码器统计的当前里程记为第一里程,其中,所述编码器系数的初始值为存储在所述中央信息系统的预先设定值;RFID定位系统确定当前里程,记为第二里程,并上报给所述中央信息系统;所述中央信息系统根据所述第二里程、车速和第一里程,计算编码器修正系数,并根据所述编码器修正系数修正所述编码器系数。本发明提供的基于RFI

基于UWB和IMU的电力巡检机器人定位方法.docx
基于UWB和IMU的电力巡检机器人定位方法标题:基于UWB和IMU的电力巡检机器人定位方法摘要:电力巡检机器人在电力系统维护中扮演着关键的角色。准确的机器人定位是实现高效巡检和故障排查的基础。本论文基于UWB(Ultra-Wideband)和IMU(InertialMeasurementUnit)技术,提出了一种电力巡检机器人的定位方法。该方法通过融合UWB测距和IMU姿态信息来实现机器人的自主定位,并通过实验验证了方法的精确性和可行性。关键词:电力巡检机器人、定位方法、UWB、IMU1.引言电力巡检是保

UWB和IMU技术融合的室内定位算法研究.docx
UWB和IMU技术融合的室内定位算法研究标题:UWB和IMU技术融合的室内定位算法研究摘要:随着室内定位技术的不断发展,室内定位的精度和可靠性成为了研究的重点。本文研究了融合超宽带(Ultra-Wideband,UWB)和惯性测量单元(InertialMeasurementUnit,IMU)技术的室内定位算法。首先介绍了UWB和IMU技术的原理和特点,然后详细探讨了融合算法的设计和实现。最后,通过实验验证了该算法在室内定位中的性能,结果表明融合UWB和IMU技术能够显著提高室内定位的精度和可靠性。关键词: