
一种基于智能图片分割的实时超声图像卵泡测量方法及系统.pdf

宜欣****外呢

1/10
2/10
3/10
4/10
5/10
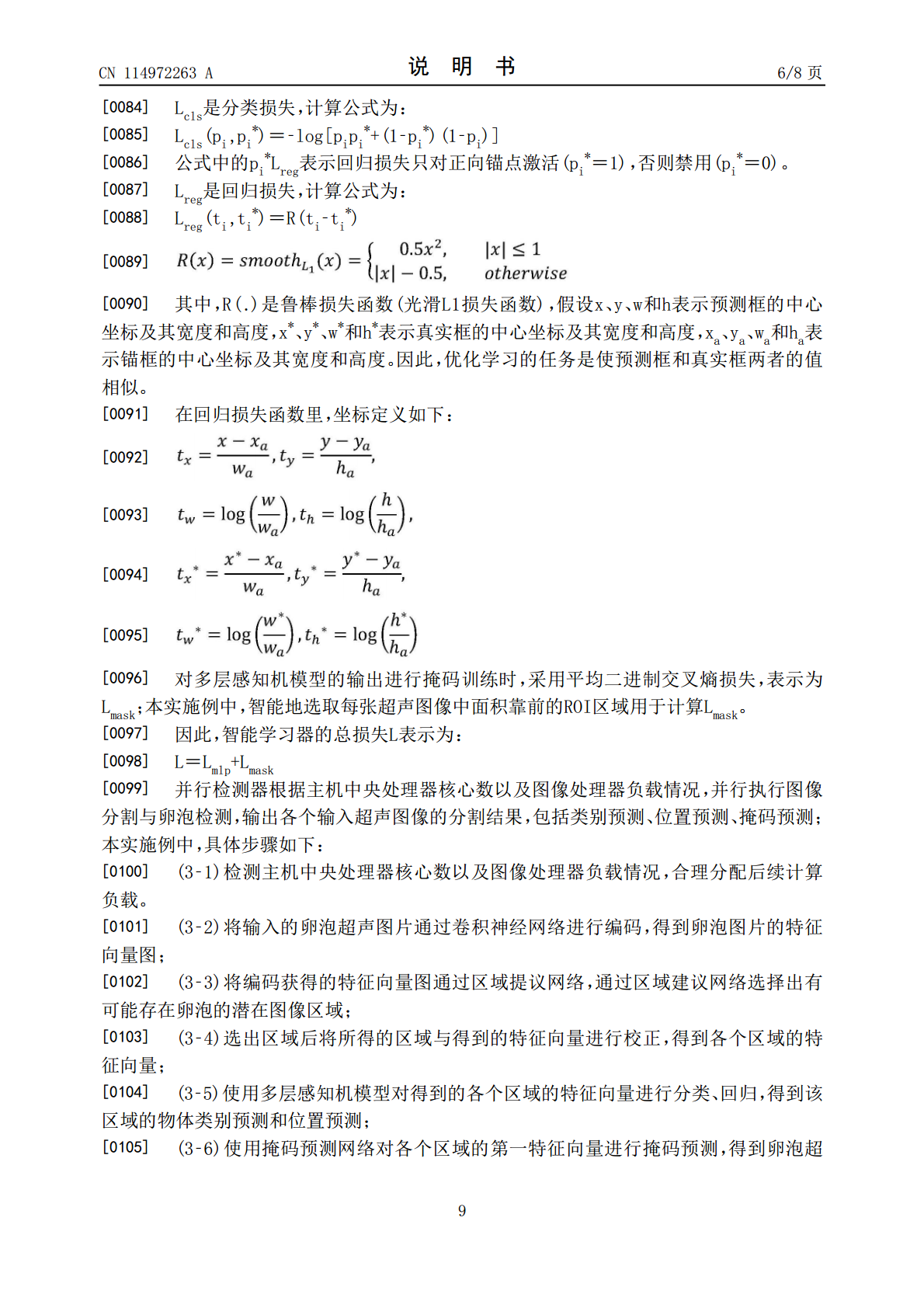
6/10
7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于智能图片分割的实时超声图像卵泡测量方法及系统.pdf
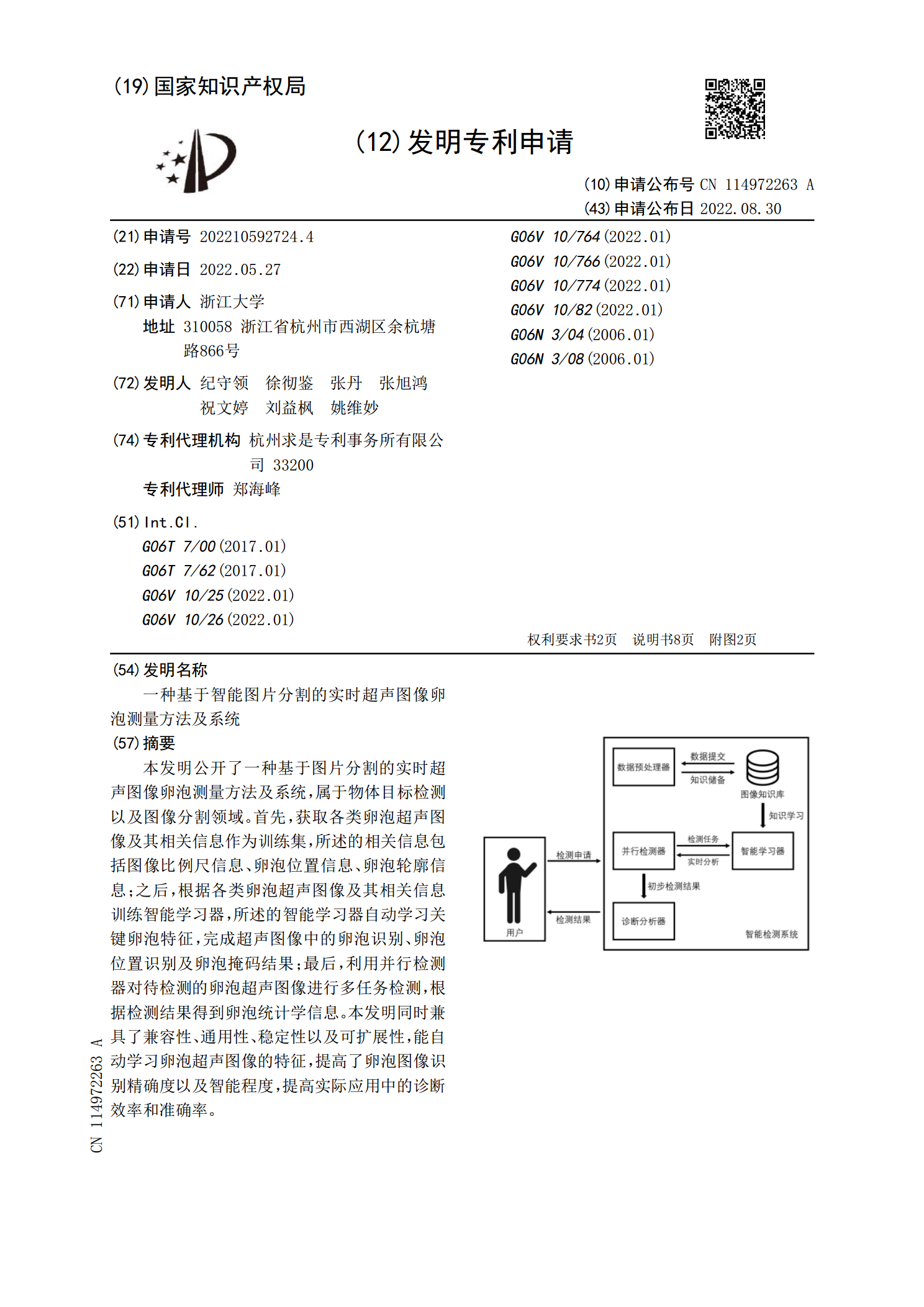
本发明公开了一种基于图片分割的实时超声图像卵泡测量方法及系统,属于物体目标检测以及图像分割领域。首先,获取各类卵泡超声图像及其相关信息作为训练集,所述的相关信息包括图像比例尺信息、卵泡位置信息、卵泡轮廓信息;之后,根据各类卵泡超声图像及其相关信息训练智能学习器,所述的智能学习器自动学习关键卵泡特征,完成超声图像中的卵泡识别、卵泡位置识别及卵泡掩码结果;最后,利用并行检测器对待检测的卵泡超声图像进行多任务检测,根据检测结果得到卵泡统计学信息。本发明同时兼具了兼容性、通用性、稳定性以及可扩展性,能自动学习卵泡

基于超声图像的参数测量方法和超声成像系统.pdf
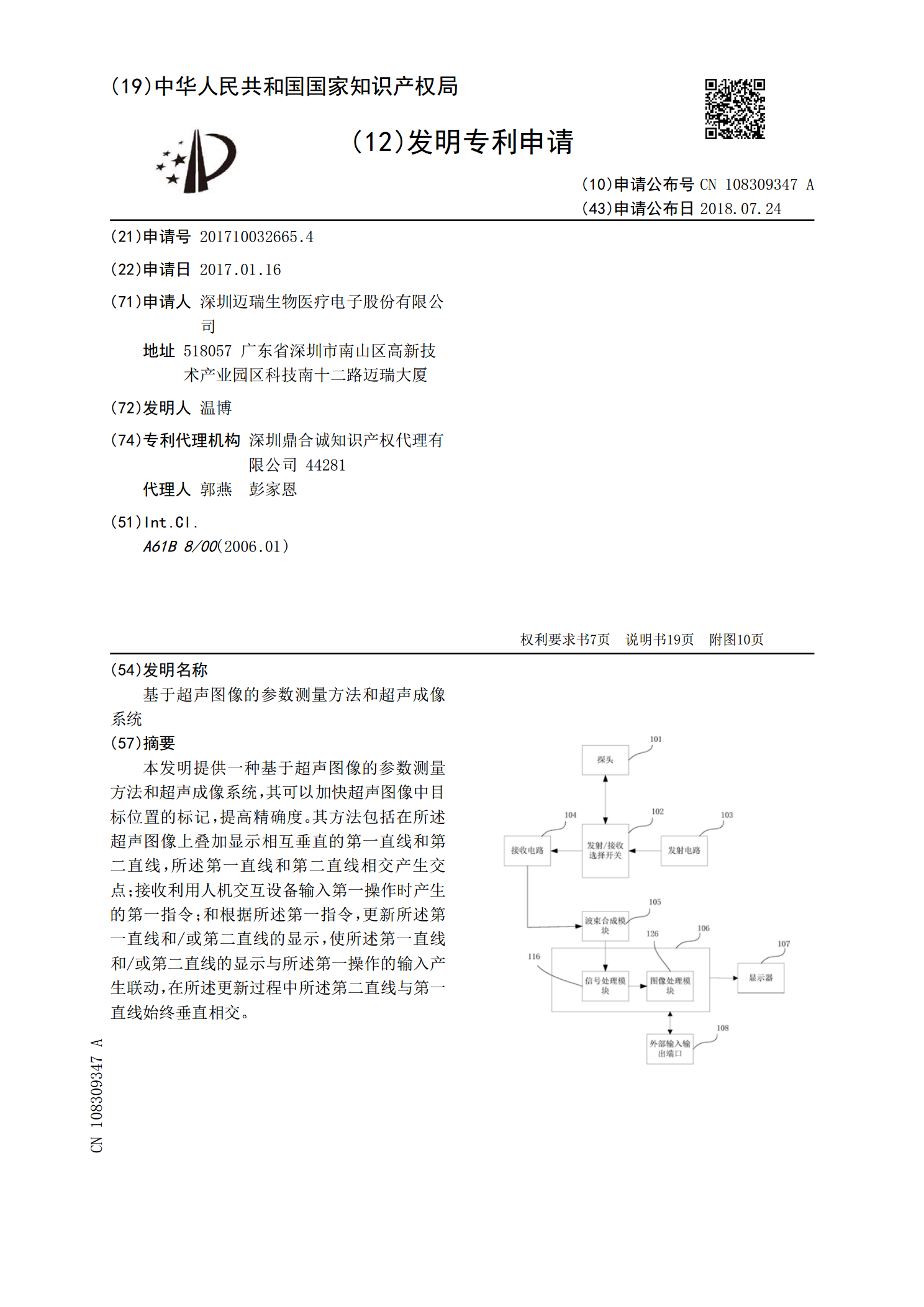
本发明提供一种基于超声图像的参数测量方法和超声成像系统,其可以加快超声图像中目标位置的标记,提高精确度。其方法包括在所述超声图像上叠加显示相互垂直的第一直线和第二直线,所述第一直线和第二直线相交产生交点;接收利用人机交互设备输入第一操作时产生的第一指令;和根据所述第一指令,更新所述第一直线和/或第二直线的显示,使所述第一直线和/或第二直线的显示与所述第一操作的输入产生联动,在所述更新过程中所述第二直线与第一直线始终垂直相交。
基于超声图像的参数测量方法和超声成像系统.pdf
本发明提供一种基于超声图像的参数测量方法和超声成像系统,其可以加快超声图像中目标位置的标记,提高精确度。其方法包括在所述超声图像上叠加显示相互垂直的第一直线和第二直线,所述第一直线和第二直线相交产生交点;接收利用人机交互设备输入第一操作时产生的第一指令;和根据所述第一指令,更新所述第一直线和/或第二直线的显示,使所述第一直线和/或第二直线的显示与所述第一操作的输入产生联动,在所述更新过程中所述第二直线与第一直线始终垂直相交。

基于机器学习的连续超声牛卵泡图像集分割算法研究的任务书.docx
基于机器学习的连续超声牛卵泡图像集分割算法研究的任务书一、任务背景近年来,随着经济的发展和人们生活水平的提高,人们对食品的安全和品质要求越来越高,而牛乳及其制品作为人们日常生活中不可或缺的饮品和食品,其质量更是牵动着人们的心。而牛乳中的脂肪、蛋白等成分主要来自于牛乳中的乳腺。因此,改善牛乳的性质就需要对牛乳中的乳腺进行细致的研究。而超声检查是监测动物乳腺疾病和卵泡发育的常用手段。超声检查可以帮助检查人员快速、准确地判断动物乳腺情况,从而指导后续研究和管理措施的制定,对推进畜牧业的可持续发展、提高产品质量都
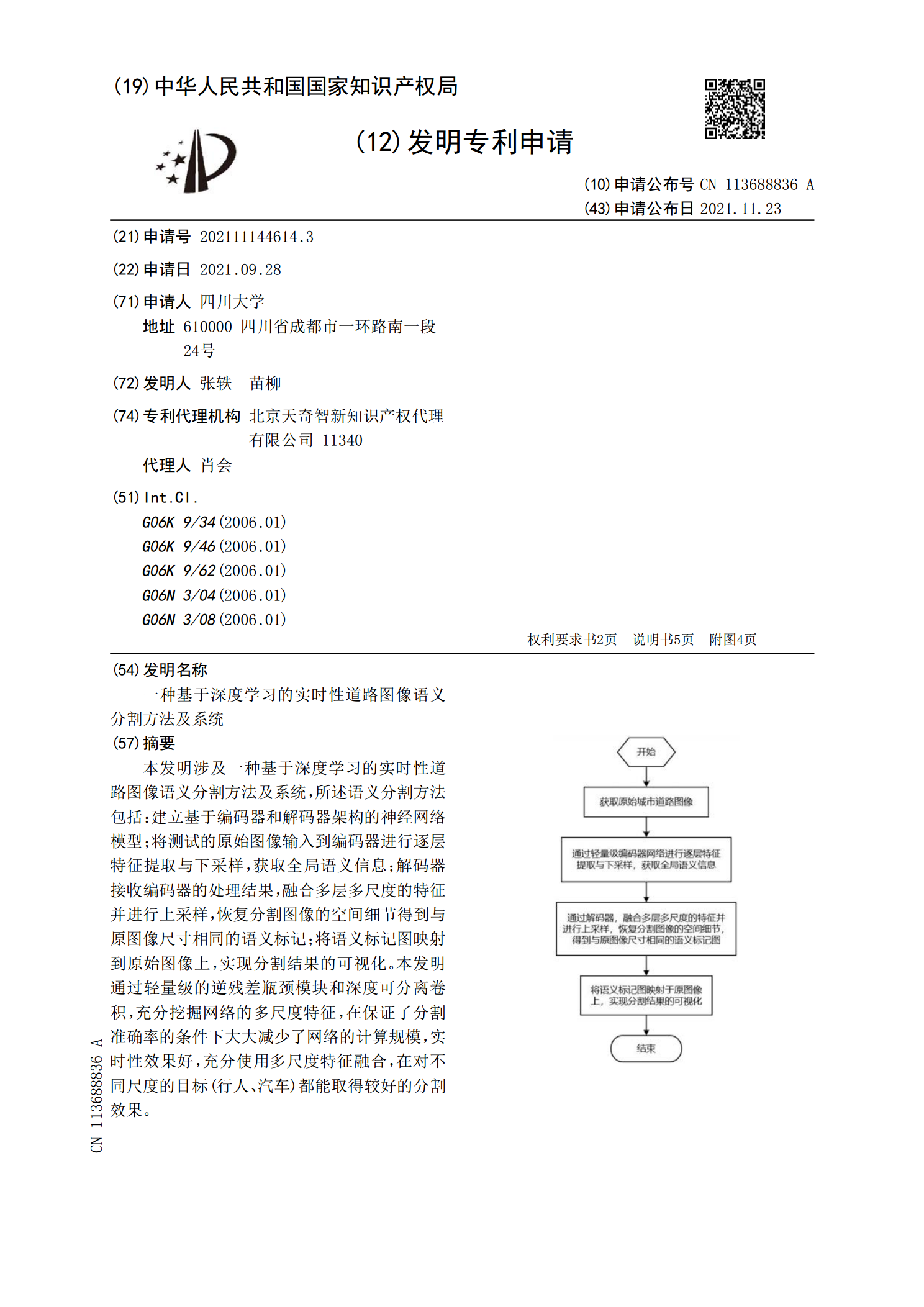
一种基于深度学习的实时性道路图像语义分割方法及系统.pdf
本发明涉及一种基于深度学习的实时性道路图像语义分割方法及系统,所述语义分割方法包括:建立基于编码器和解码器架构的神经网络模型;将测试的原始图像输入到编码器进行逐层特征提取与下采样,获取全局语义信息;解码器接收编码器的处理结果,融合多层多尺度的特征并进行上采样,恢复分割图像的空间细节得到与原图像尺寸相同的语义标记;将语义标记图映射到原始图像上,实现分割结果的可视化。本发明通过轻量级的逆残差瓶颈模块和深度可分离卷积,充分挖掘网络的多尺度特征,在保证了分割准确率的条件下大大减少了网络的计算规模,实时性效果好,充