
一种自动堆叠方法、装置及系统.pdf

海昌****姐淑


1/10
2/10
3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种自动堆叠方法、装置及系统.pdf
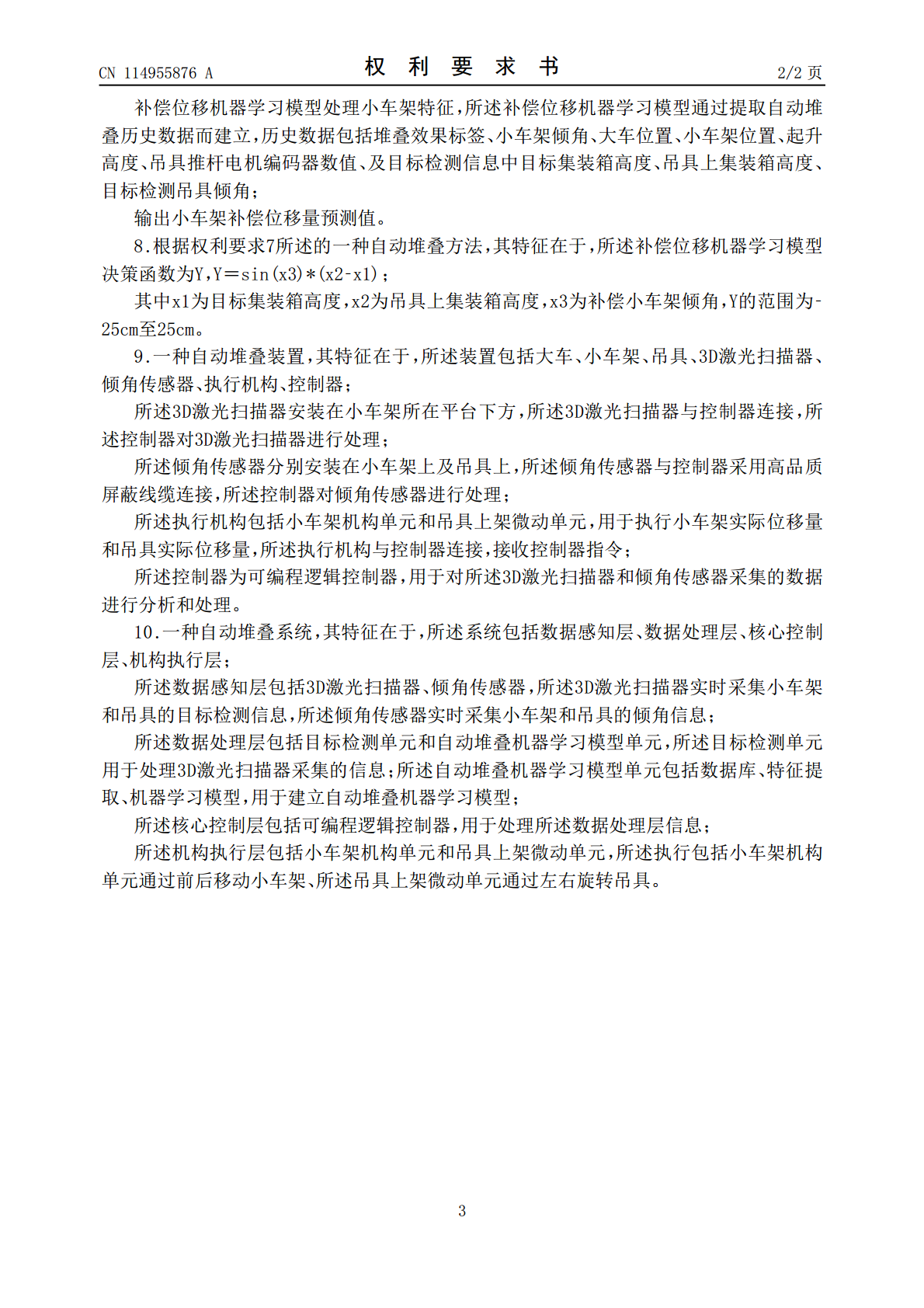
本发明涉及集装箱堆叠领域,应用于轨道式集装箱起重机,提供一种自动堆叠方法、装置及系统,包括大车、小车架、吊具、控制器。通过3D激光扫描器得到目标检测信息,所述控制器对目标检测信息进行处理得到小车架目标检测位移量和吊具目标检测位移量。通过倾角传感器得到补偿检测信息,所述补偿检测信息包括补偿小车架倾角和补偿吊具倾角,所述控制器对目标检测信息和补偿检测信息进行处理得到小车架补偿位移量和吊具补偿位移量。根据小车架目标检测位移量和小车架补偿位移量求和得到小车架实际位移量,根据吊具目标检测位移量和吊具补偿位移量求和得
一种瓷片自动堆叠装置.pdf
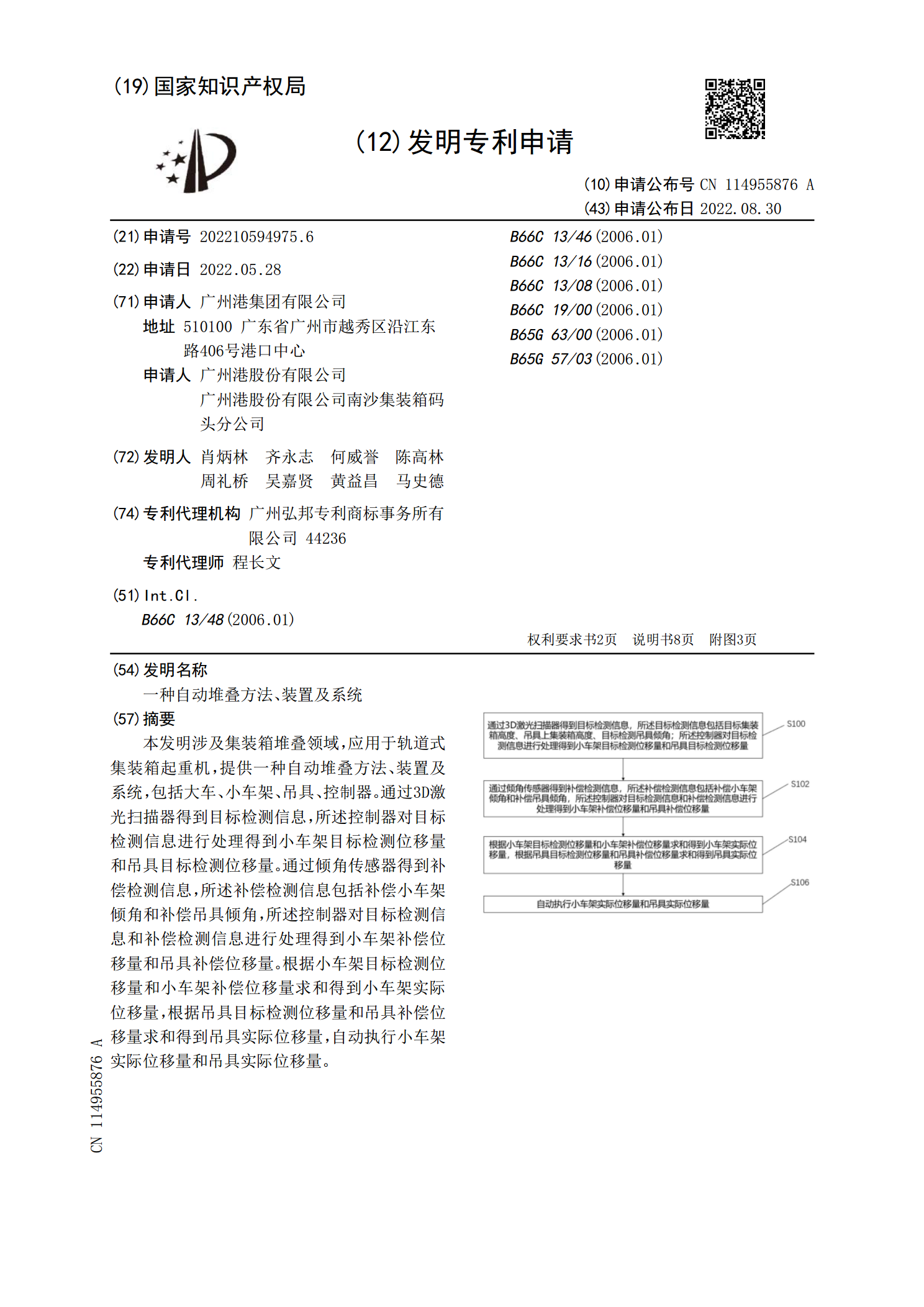
一种瓷片自动堆叠装置包括计数机构、堆叠治具、升降台机构,计数机构设于堆叠治具的入口处,升降台机构设于堆叠治具下方。计数机构包括计数传感器、支撑架、传感器安装钣金,传感器安装钣金安装于支撑架上端面。堆叠治具包括治具底板、物料框、L形导向块、导向条,物料框设于治具底板上方,L形导向块以及导向条均布于物料框内侧形成产品导向内腔。升降台机构包括升降驱动器、升降齿条、产品受台、产品检测传感器、工作状态检测传感器。本发明的一种瓷片自动堆叠装置,通过设置计数机构、堆叠治具、升降台机构,准确有效的对自动化产线上的瓷片进行
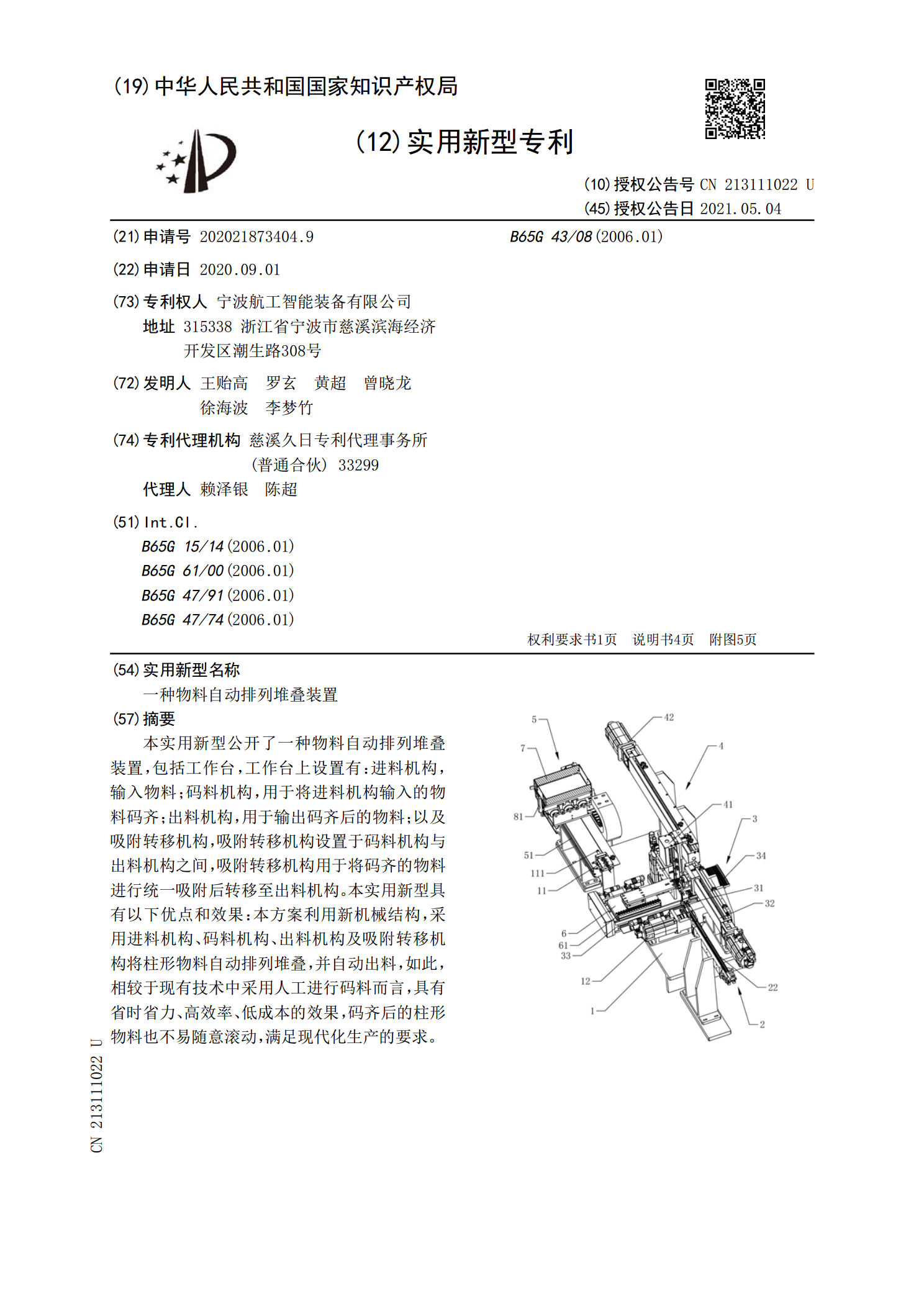
一种物料自动排列堆叠装置.pdf
本实用新型公开了一种物料自动排列堆叠装置,包括工作台,工作台上设置有:进料机构,输入物料;码料机构,用于将进料机构输入的物料码齐;出料机构,用于输出码齐后的物料;以及吸附转移机构,吸附转移机构设置于码料机构与出料机构之间,吸附转移机构用于将码齐的物料进行统一吸附后转移至出料机构。本实用新型具有以下优点和效果:本方案利用新机械结构,采用进料机构、码料机构、出料机构及吸附转移机构将柱形物料自动排列堆叠,并自动出料,如此,相较于现有技术中采用人工进行码料而言,具有省时省力、高效率、低成本的效果,码齐后的柱形物料
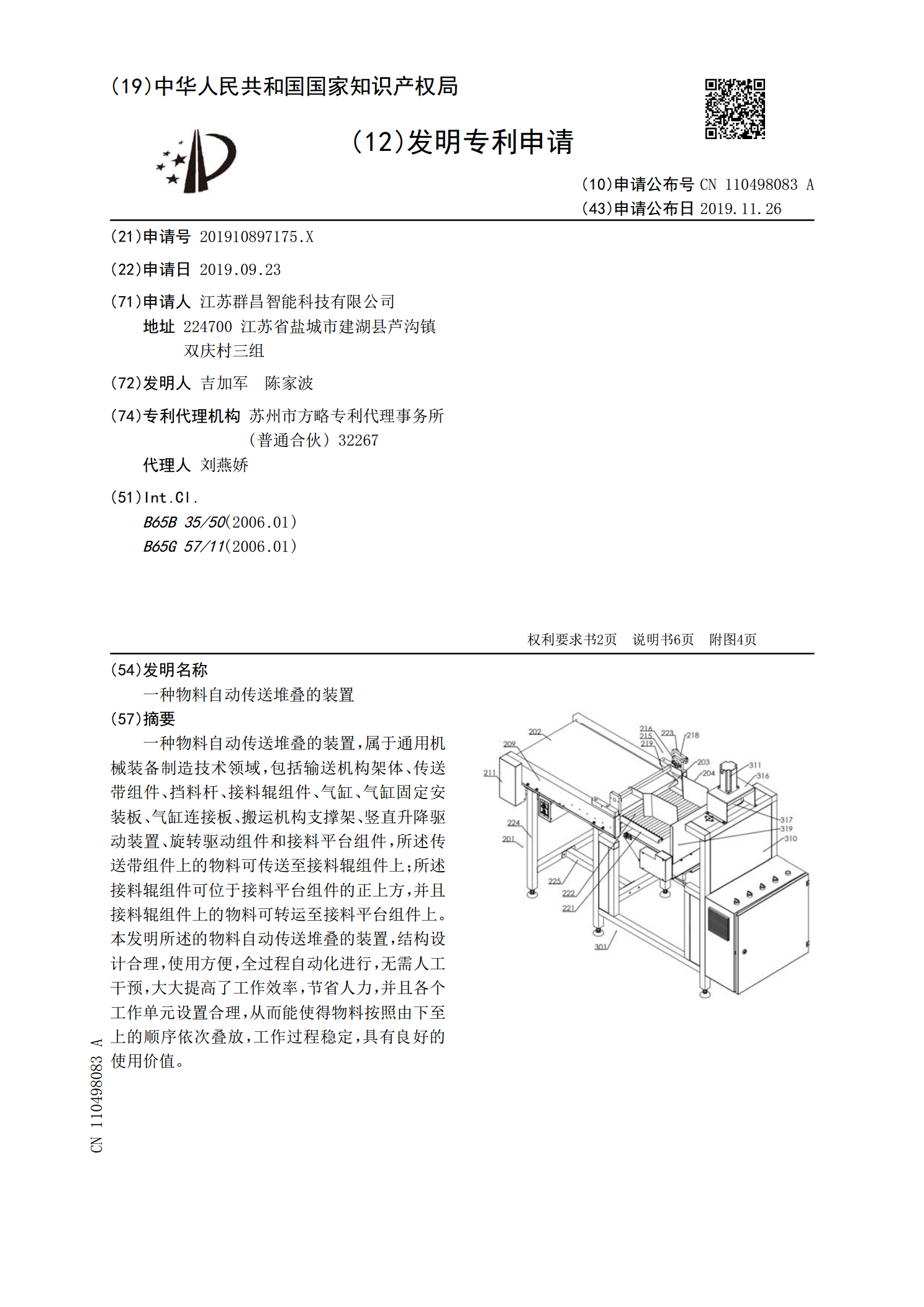
一种物料自动传送堆叠的装置.pdf
一种物料自动传送堆叠的装置,属于通用机械装备制造技术领域,包括输送机构架体、传送带组件、挡料杆、接料辊组件、气缸、气缸固定安装板、气缸连接板、搬运机构支撑架、竖直升降驱动装置、旋转驱动组件和接料平台组件,所述传送带组件上的物料可传送至接料辊组件上;所述接料辊组件可位于接料平台组件的正上方,并且接料辊组件上的物料可转运至接料平台组件上。本发明所述的物料自动传送堆叠的装置,结构设计合理,使用方便,全过程自动化进行,无需人工干预,大大提高了工作效率,节省人力,并且各个工作单元设置合理,从而能使得物料按照由下至上
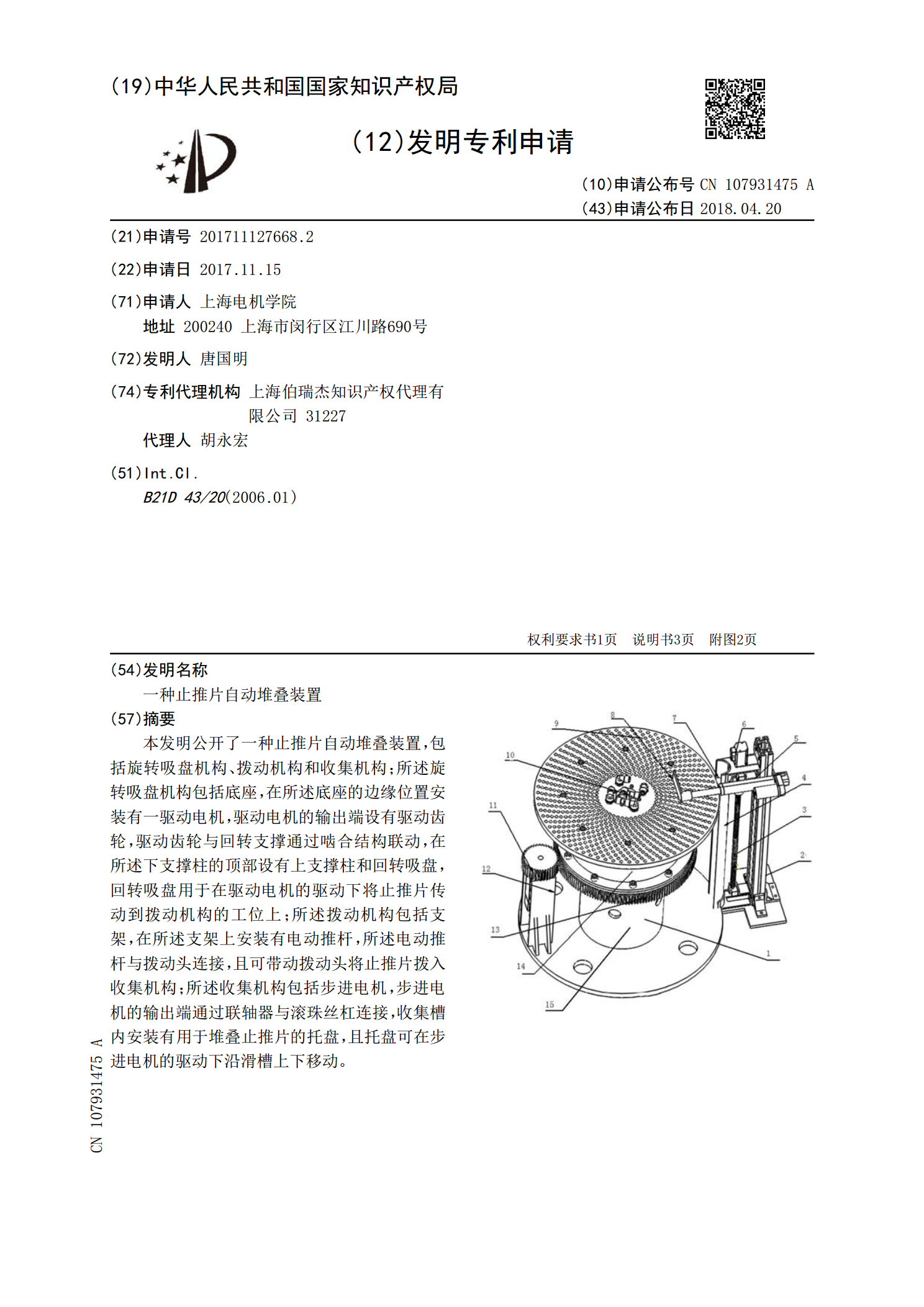
一种止推片自动堆叠装置.pdf
本发明公开了一种止推片自动堆叠装置,包括旋转吸盘机构、拨动机构和收集机构;所述旋转吸盘机构包括底座,在所述底座的边缘位置安装有一驱动电机,驱动电机的输出端设有驱动齿轮,驱动齿轮与回转支撑通过啮合结构联动,在所述下支撑柱的顶部设有上支撑柱和回转吸盘,回转吸盘用于在驱动电机的驱动下将止推片传动到拨动机构的工位上;所述拨动机构包括支架,在所述支架上安装有电动推杆,所述电动推杆与拨动头连接,且可带动拨动头将止推片拨入收集机构;所述收集机构包括步进电机,步进电机的输出端通过联轴器与滚珠丝杠连接,收集槽内安装有用于堆