
云边协同自适应推理路径规划的目标追踪方法和系统.pdf

春景****23

1/10
2/10

3/10

4/10

5/10
6/10

7/10

8/10

9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

云边协同自适应推理路径规划的目标追踪方法和系统.pdf
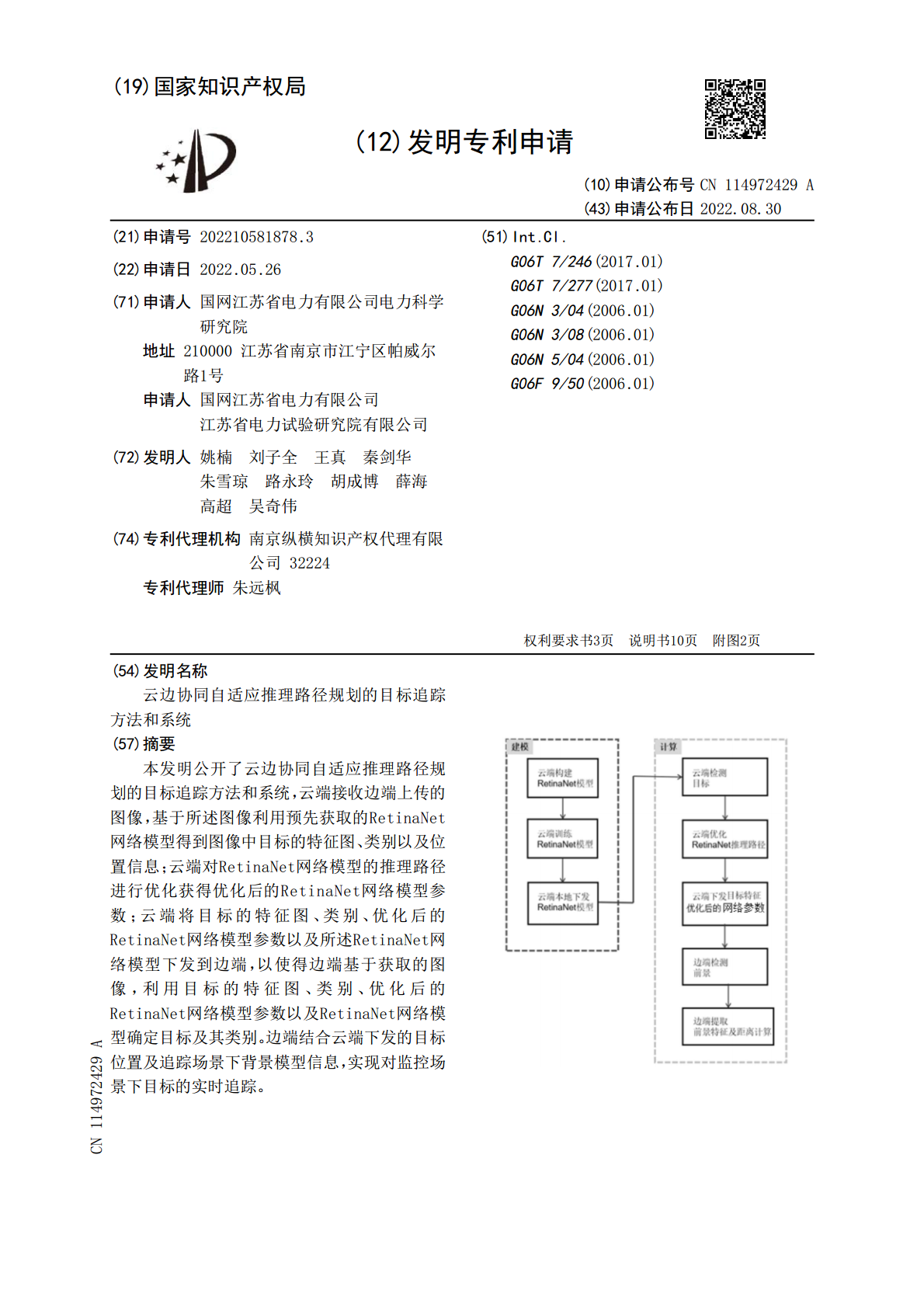
本发明公开了云边协同自适应推理路径规划的目标追踪方法和系统,云端接收边端上传的图像,基于所述图像利用预先获取的RetinaNet网络模型得到图像中目标的特征图、类别以及位置信息;云端对RetinaNet网络模型的推理路径进行优化获得优化后的RetinaNet网络模型参数;云端将目标的特征图、类别、优化后的RetinaNet网络模型参数以及所述RetinaNet网络模型下发到边端,以使得边端基于获取的图像,利用目标的特征图、类别、优化后的RetinaNet网络模型参数以及RetinaNet网络模型确定目标及

基于云边协同的目标跟踪方法、系统、设备和介质.pdf
本发明涉及人工智能技术领域,提供一种基于云边协同的目标跟踪方法、系统、设备和介质。目标跟踪方法包括:云端节点向边缘节点组中的主边缘节点和各从边缘节点下发计算资源;主边缘节点根据获得的计算资源,获取当前周期的待跟踪视频流,对待跟踪视频流进行第一阶段检测以获得目标视频数据,分发至各从边缘节点;各从边缘节点根据获得的计算资源,对接收到的目标视频数据进行第二阶段检测以获得候选对象,并将候选对象与目标对象进行比对以获得当前周期的目标检测结果,上传至主边缘节点。本发明能够在云端节点的控制下,实现多个边缘节点的动态协同
一种基于目标追踪的视频计算云边协同任务调度方法.pdf
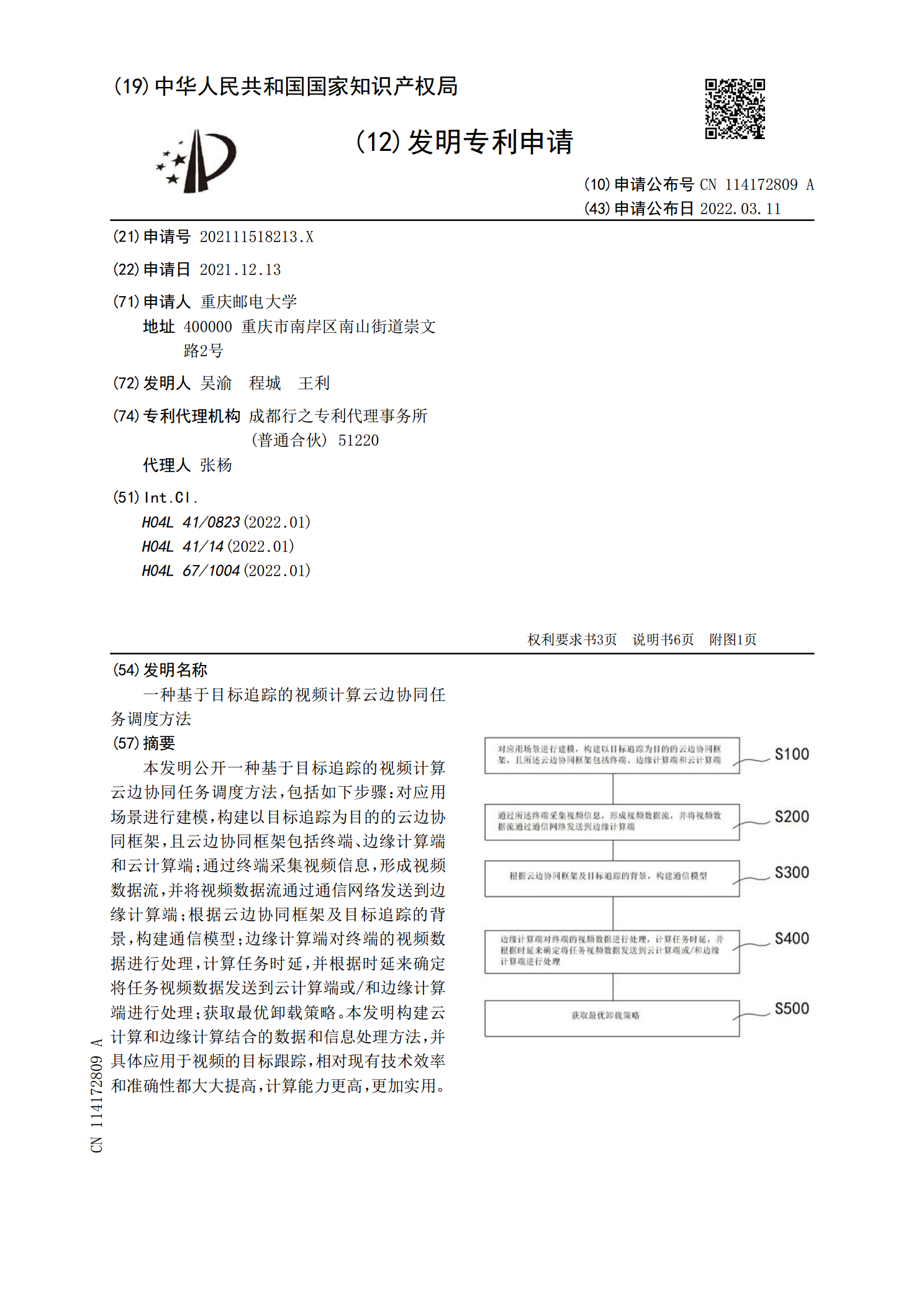
本发明公开一种基于目标追踪的视频计算云边协同任务调度方法,包括如下步骤:对应用场景进行建模,构建以目标追踪为目的的云边协同框架,且云边协同框架包括终端、边缘计算端和云计算端;通过终端采集视频信息,形成视频数据流,并将视频数据流通过通信网络发送到边缘计算端;根据云边协同框架及目标追踪的背景,构建通信模型;边缘计算端对终端的视频数据进行处理,计算任务时延,并根据时延来确定将任务视频数据发送到云计算端或/和边缘计算端进行处理;获取最优卸载策略。本发明构建云计算和边缘计算结合的数据和信息处理方法,并具体应用于视频
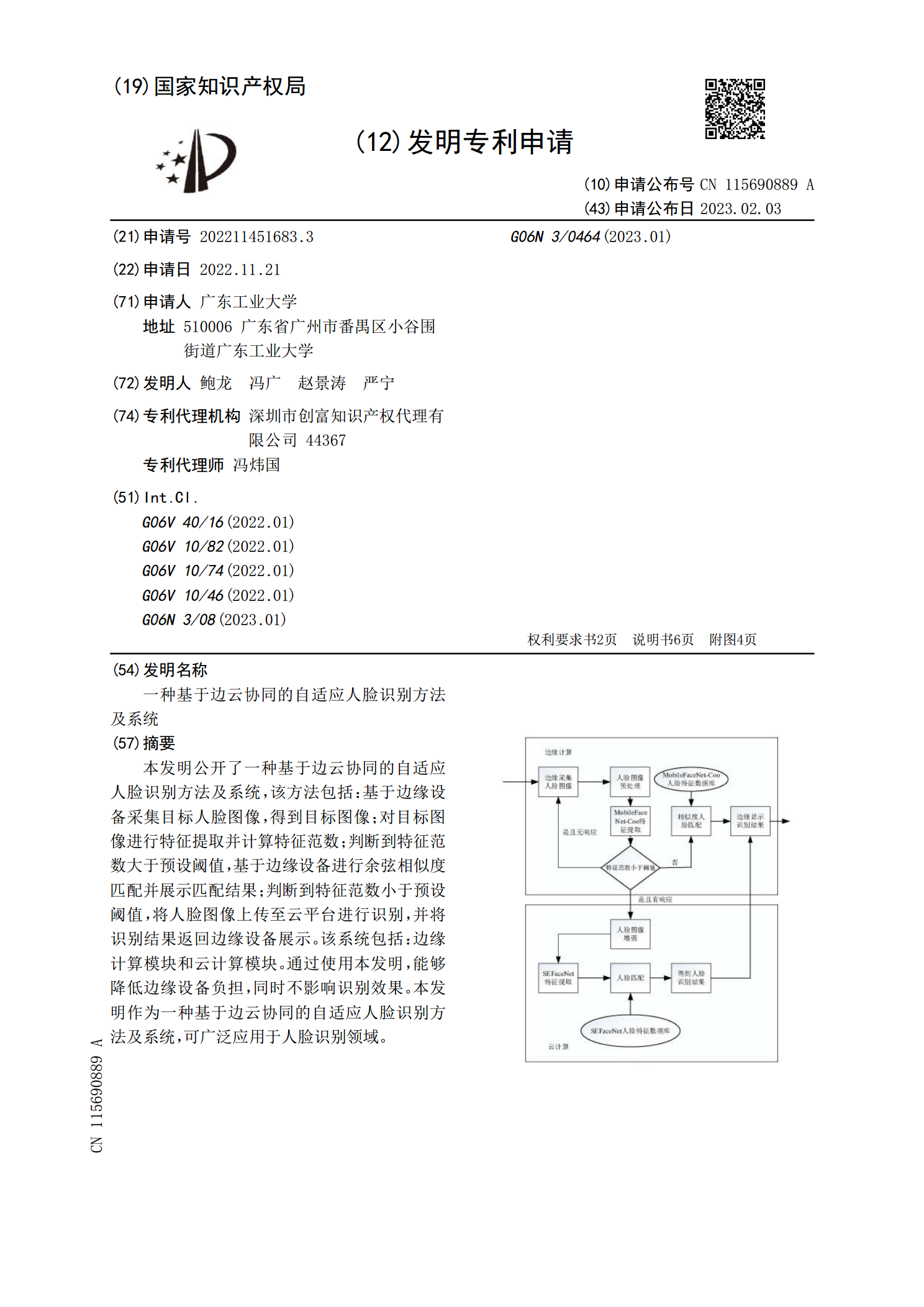
一种基于边云协同的自适应人脸识别方法及系统.pdf
本发明公开了一种基于边云协同的自适应人脸识别方法及系统,该方法包括:基于边缘设备采集目标人脸图像,得到目标图像;对目标图像进行特征提取并计算特征范数;判断到特征范数大于预设阈值,基于边缘设备进行余弦相似度匹配并展示匹配结果;判断到特征范数小于预设阈值,将人脸图像上传至云平台进行识别,并将识别结果返回边缘设备展示。该系统包括:边缘计算模块和云计算模块。通过使用本发明,能够降低边缘设备负担,同时不影响识别效果。本发明作为一种基于边云协同的自适应人脸识别方法及系统,可广泛应用于人脸识别领域。
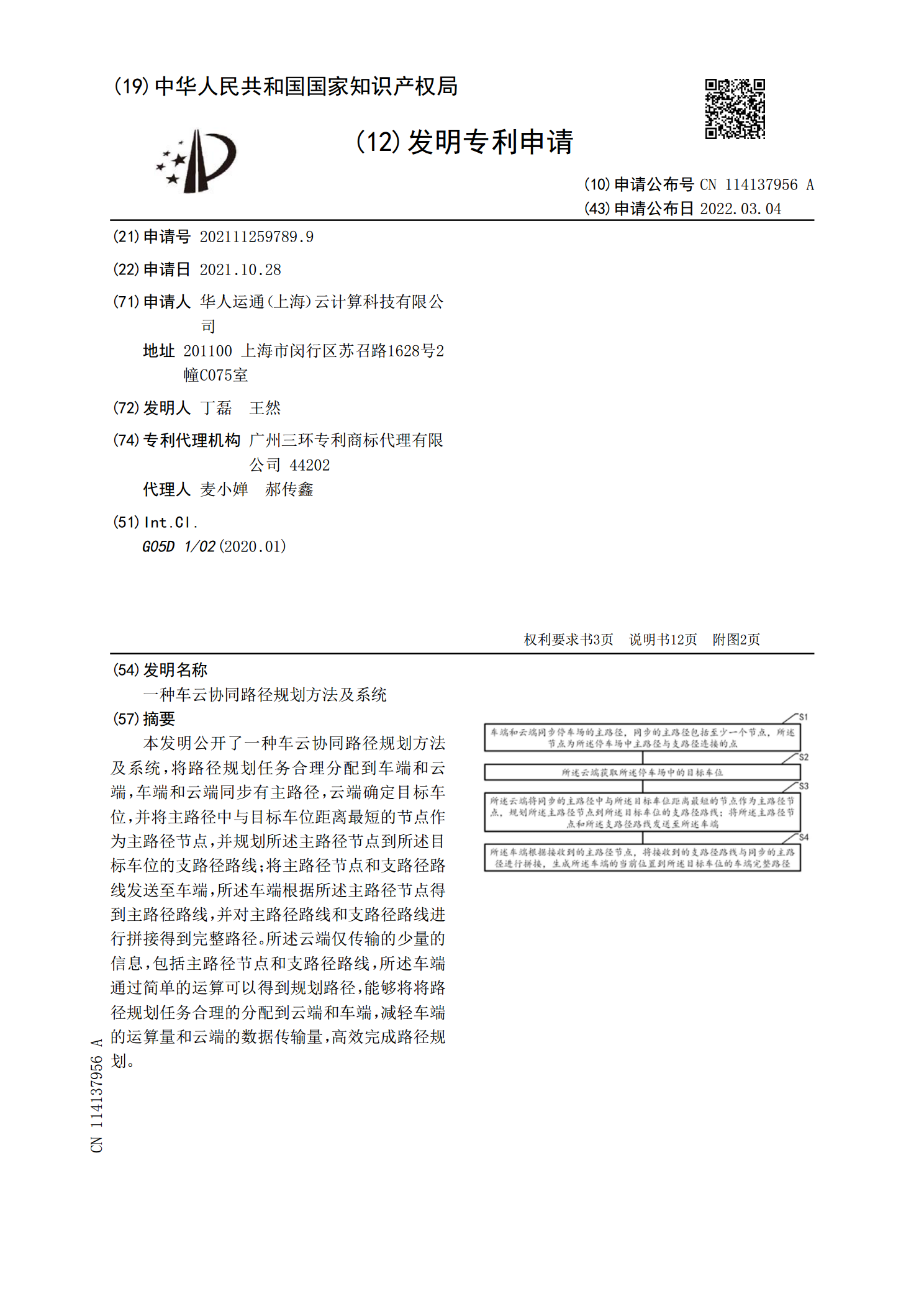
一种车云协同路径规划方法及系统.pdf
本发明公开了一种车云协同路径规划方法及系统,将路径规划任务合理分配到车端和云端,车端和云端同步有主路径,云端确定目标车位,并将主路径中与目标车位距离最短的节点作为主路径节点,并规划所述主路径节点到所述目标车位的支路径路线;将主路径节点和支路径路线发送至车端,所述车端根据所述主路径节点得到主路径路线,并对主路径路线和支路径路线进行拼接得到完整路径。所述云端仅传输的少量的信息,包括主路径节点和支路径路线,所述车端通过简单的运算可以得到规划路径,能够将将路径规划任务合理的分配到云端和车端,减轻车端的运算量和云端