
一种三维建筑轮廓提取方法、装置、电子设备及存储介质.pdf

猫巷****觅蓉

1/10

2/10
3/10
4/10

5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种三维建筑轮廓提取方法、装置、电子设备及存储介质.pdf
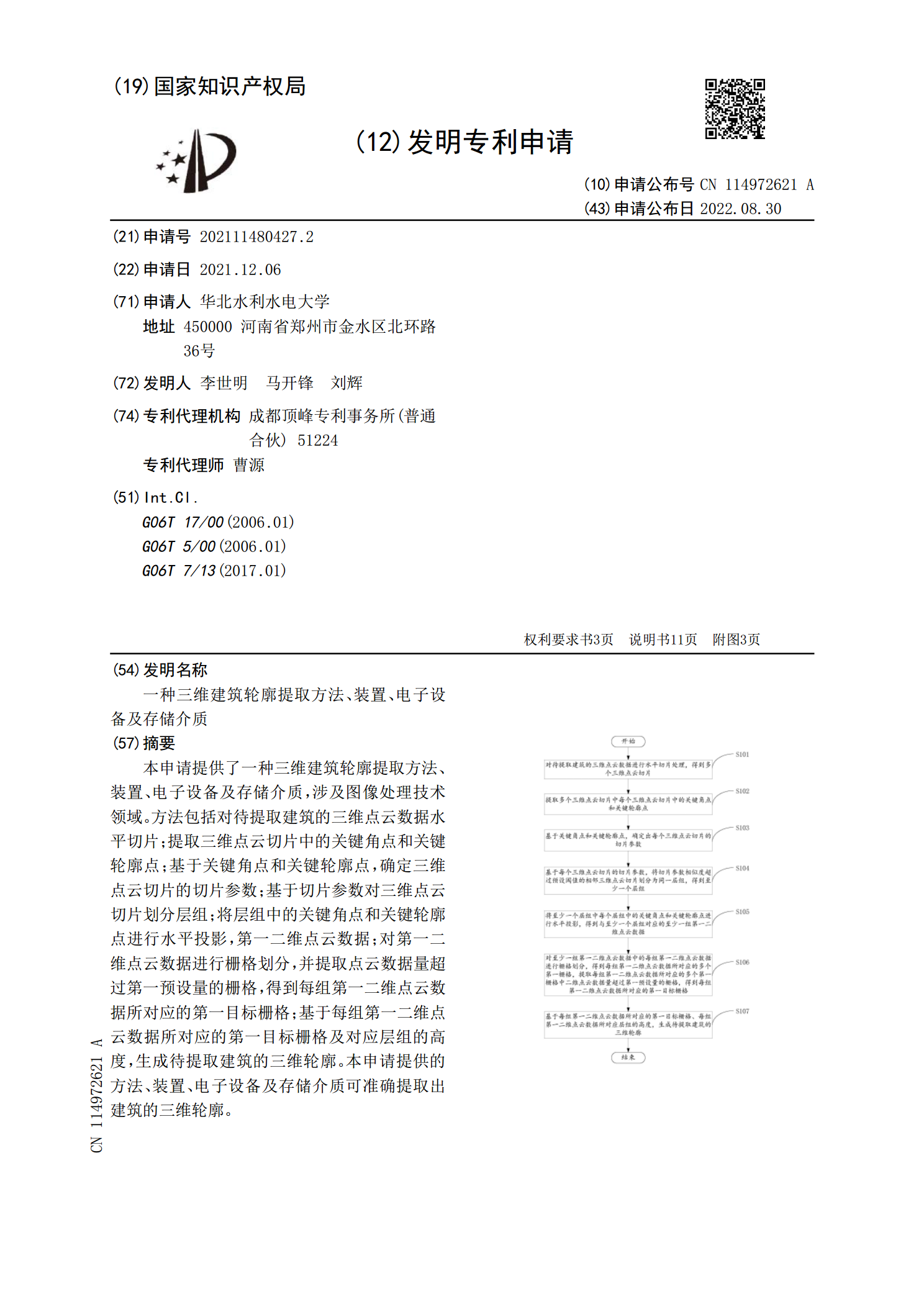
本申请提供了一种三维建筑轮廓提取方法、装置、电子设备及存储介质,涉及图像处理技术领域。方法包括对待提取建筑的三维点云数据水平切片;提取三维点云切片中的关键角点和关键轮廓点;基于关键角点和关键轮廓点,确定三维点云切片的切片参数;基于切片参数对三维点云切片划分层组;将层组中的关键角点和关键轮廓点进行水平投影,第一二维点云数据;对第一二维点云数据进行栅格划分,并提取点云数据量超过第一预设量的栅格,得到每组第一二维点云数据所对应的第一目标栅格;基于每组第一二维点云数据所对应的第一目标栅格及对应层组的高度,生成待提
目标轮廓提取方法、装置、设备及存储介质.pdf
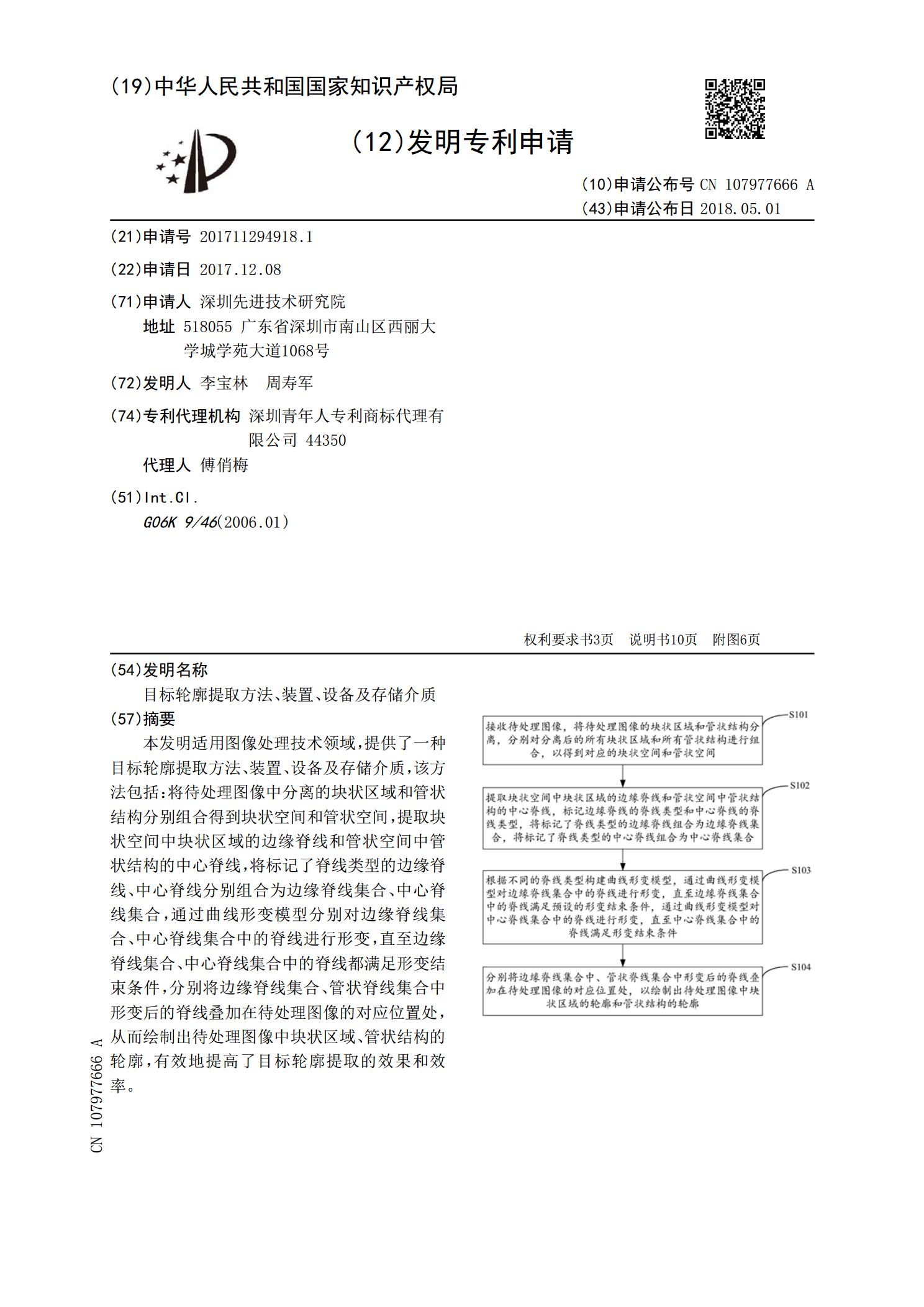
本发明适用图像处理技术领域,提供了一种目标轮廓提取方法、装置、设备及存储介质,该方法包括:将待处理图像中分离的块状区域和管状结构分别组合得到块状空间和管状空间,提取块状空间中块状区域的边缘脊线和管状空间中管状结构的中心脊线,将标记了脊线类型的边缘脊线、中心脊线分别组合为边缘脊线集合、中心脊线集合,通过曲线形变模型分别对边缘脊线集合、中心脊线集合中的脊线进行形变,直至边缘脊线集合、中心脊线集合中的脊线都满足形变结束条件,分别将边缘脊线集合、管状脊线集合中形变后的脊线叠加在待处理图像的对应位置处,从而绘制出待
数据提取方法、装置、电子设备及存储介质.pdf
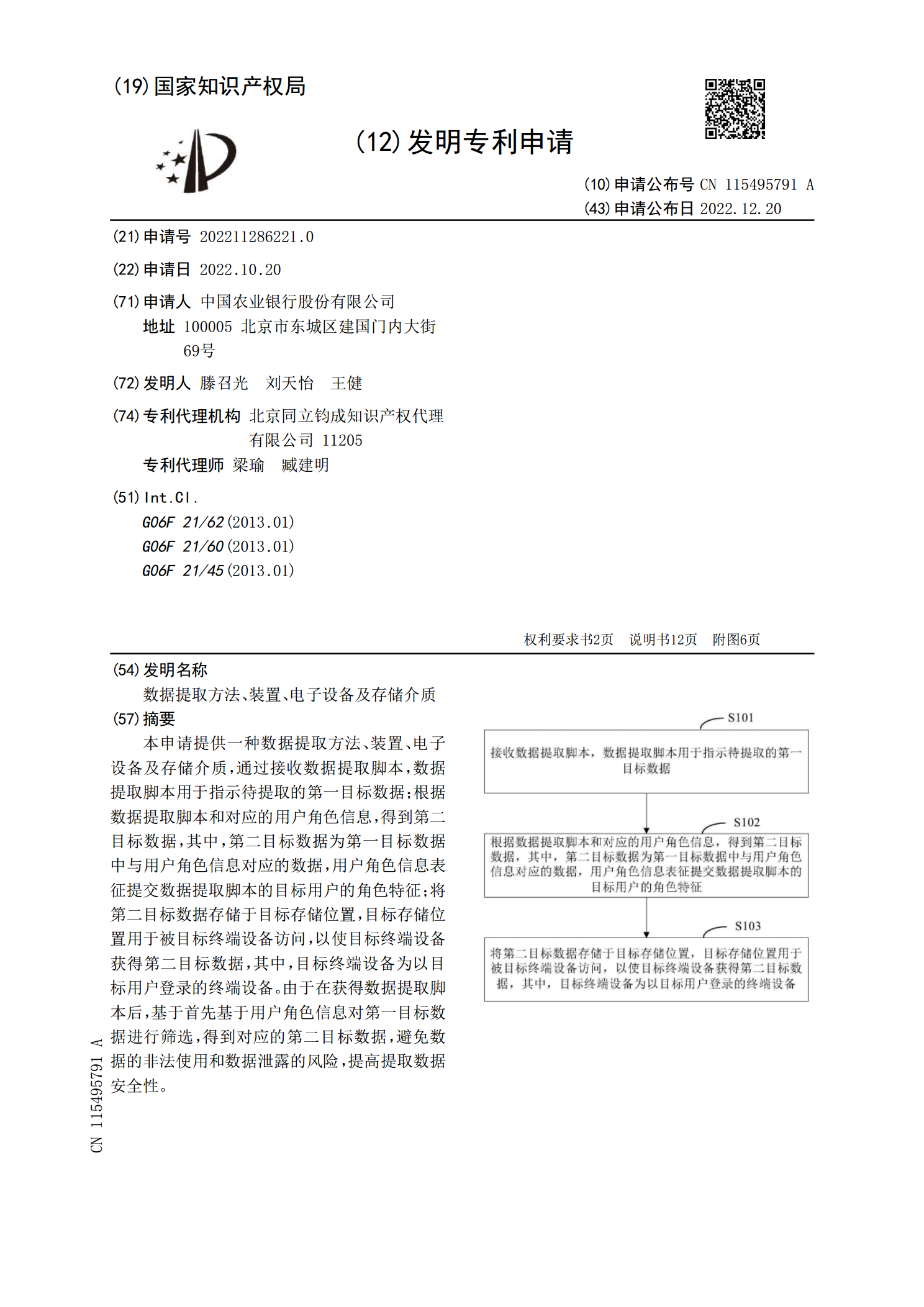
本申请提供一种数据提取方法、装置、电子设备及存储介质,通过接收数据提取脚本,数据提取脚本用于指示待提取的第一目标数据;根据数据提取脚本和对应的用户角色信息,得到第二目标数据,其中,第二目标数据为第一目标数据中与用户角色信息对应的数据,用户角色信息表征提交数据提取脚本的目标用户的角色特征;将第二目标数据存储于目标存储位置,目标存储位置用于被目标终端设备访问,以使目标终端设备获得第二目标数据,其中,目标终端设备为以目标用户登录的终端设备。由于在获得数据提取脚本后,基于首先基于用户角色信息对第一目标数据进行筛选

一种靶区轮廓的分析方法、装置、存储介质及电子设备.pdf
本申请提供一种靶区轮廓的分析方法、装置、存储介质及电子设备,方法应用于电子设备,所述方法包括:获取用户针对靶区勾画的靶区轮廓;计算出所述靶区轮廓与所述靶区预设的靶区标准轮廓的重合度;通过分析所述重合度,以对所述靶区轮廓进行评估。通过电子设备自动计算用户即学生勾画的靶区轮廓与靶区标准轮廓的重合度,再通过电子设备自动分析该重合度,以确定出该勾画的靶区轮廓的准确度,整个过程无需人工参与,实现了高效的对勾画的靶区进行分析评估。
一种事件提取方法、装置、电子设备及存储介质.pdf
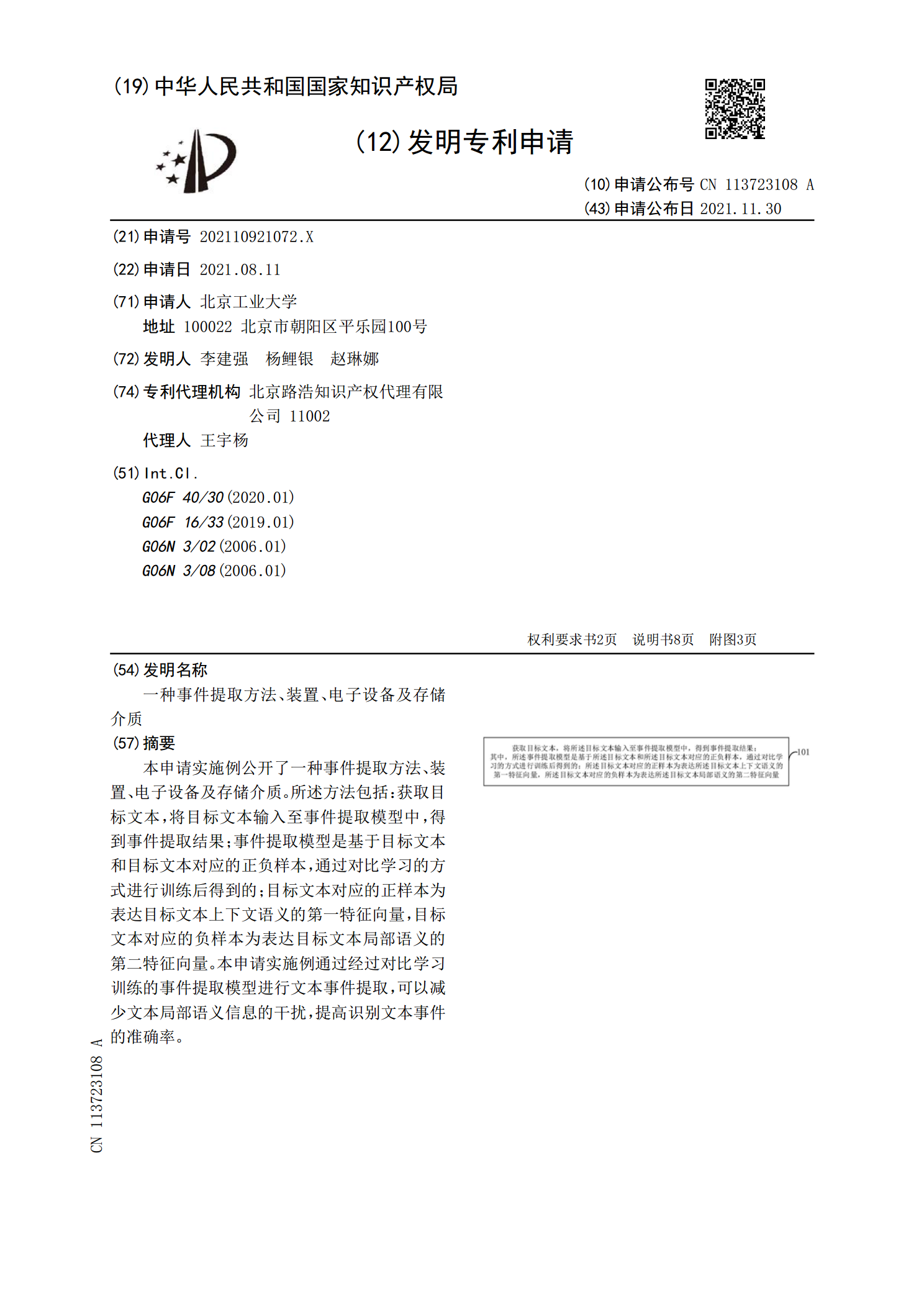
本申请实施例公开了一种事件提取方法、装置、电子设备及存储介质。所述方法包括:获取目标文本,将目标文本输入至事件提取模型中,得到事件提取结果;事件提取模型是基于目标文本和目标文本对应的正负样本,通过对比学习的方式进行训练后得到的;目标文本对应的正样本为表达目标文本上下文语义的第一特征向量,目标文本对应的负样本为表达目标文本局部语义的第二特征向量。本申请实施例通过经过对比学习训练的事件提取模型进行文本事件提取,可以减少文本局部语义信息的干扰,提高识别文本事件的准确率。