
无人机航拍场景中的目标检测系统、无人机航拍系统.pdf

哲妍****彩妍

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
无人机航拍场景中的目标检测系统、无人机航拍系统.pdf
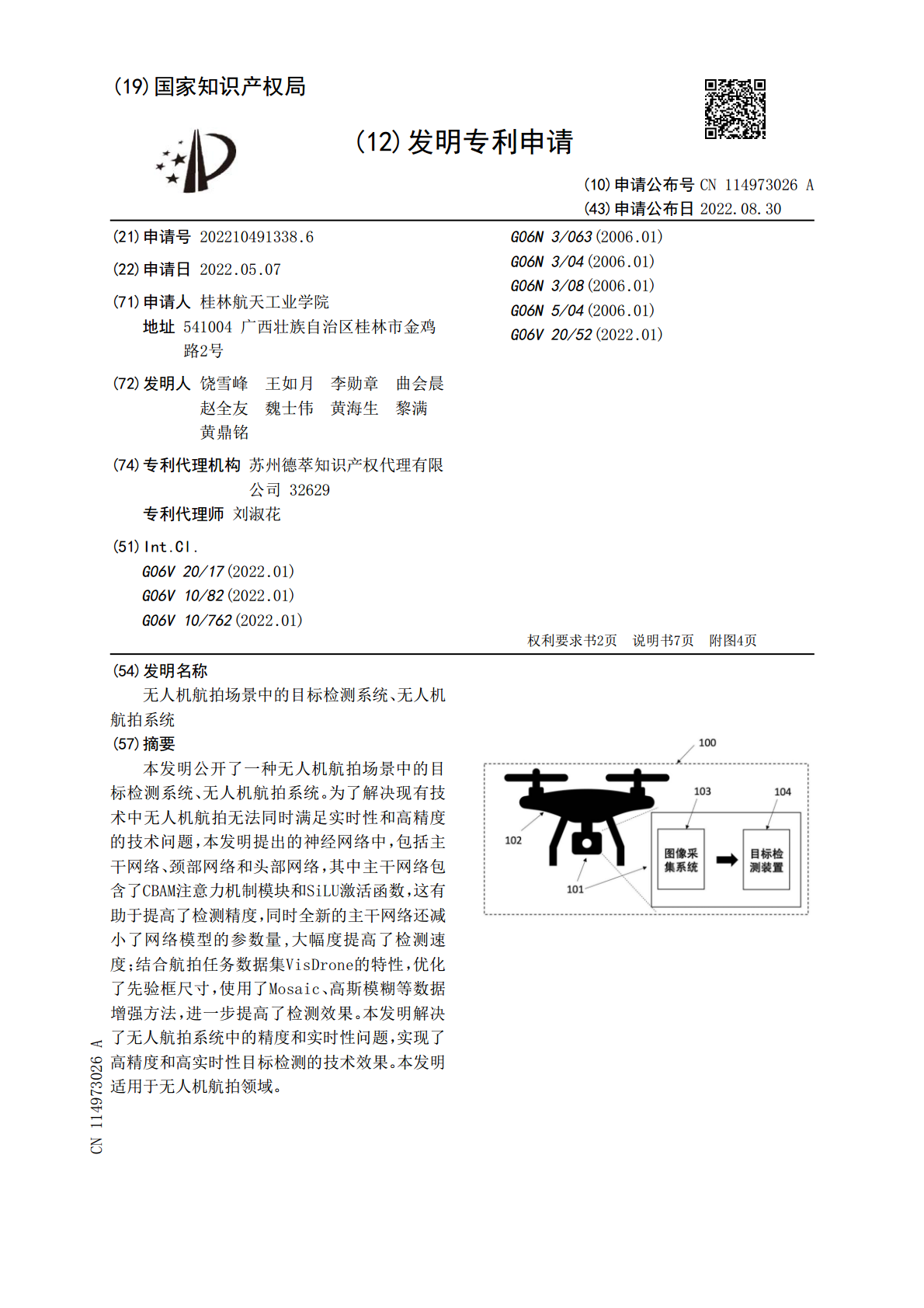
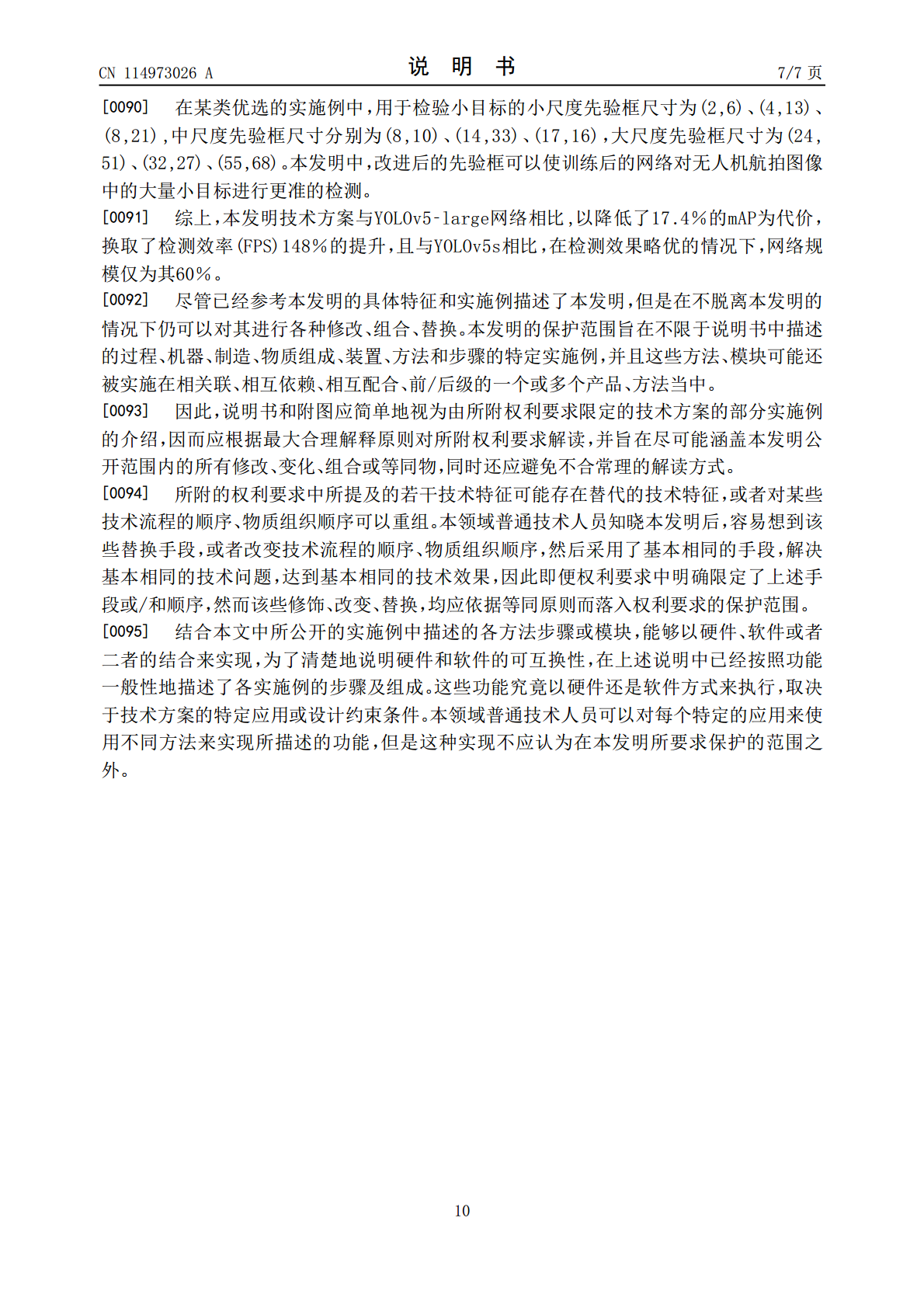
本发明公开了一种无人机航拍场景中的目标检测系统、无人机航拍系统。为了解决现有技术中无人机航拍无法同时满足实时性和高精度的技术问题,本发明提出的神经网络中,包括主干网络、颈部网络和头部网络,其中主干网络包含了CBAM注意力机制模块和SiLU激活函数,这有助于提高了检测精度,同时全新的主干网络还减小了网络模型的参数量,大幅度提高了检测速度;结合航拍任务数据集VisDrone的特性,优化了先验框尺寸,使用了Mosaic、高斯模糊等数据增强方法,进一步提高了检测效果。本发明解决了无人航拍系统中的精度和实时性问题,
一种无人机航拍装置以及航拍控制系统.pdf
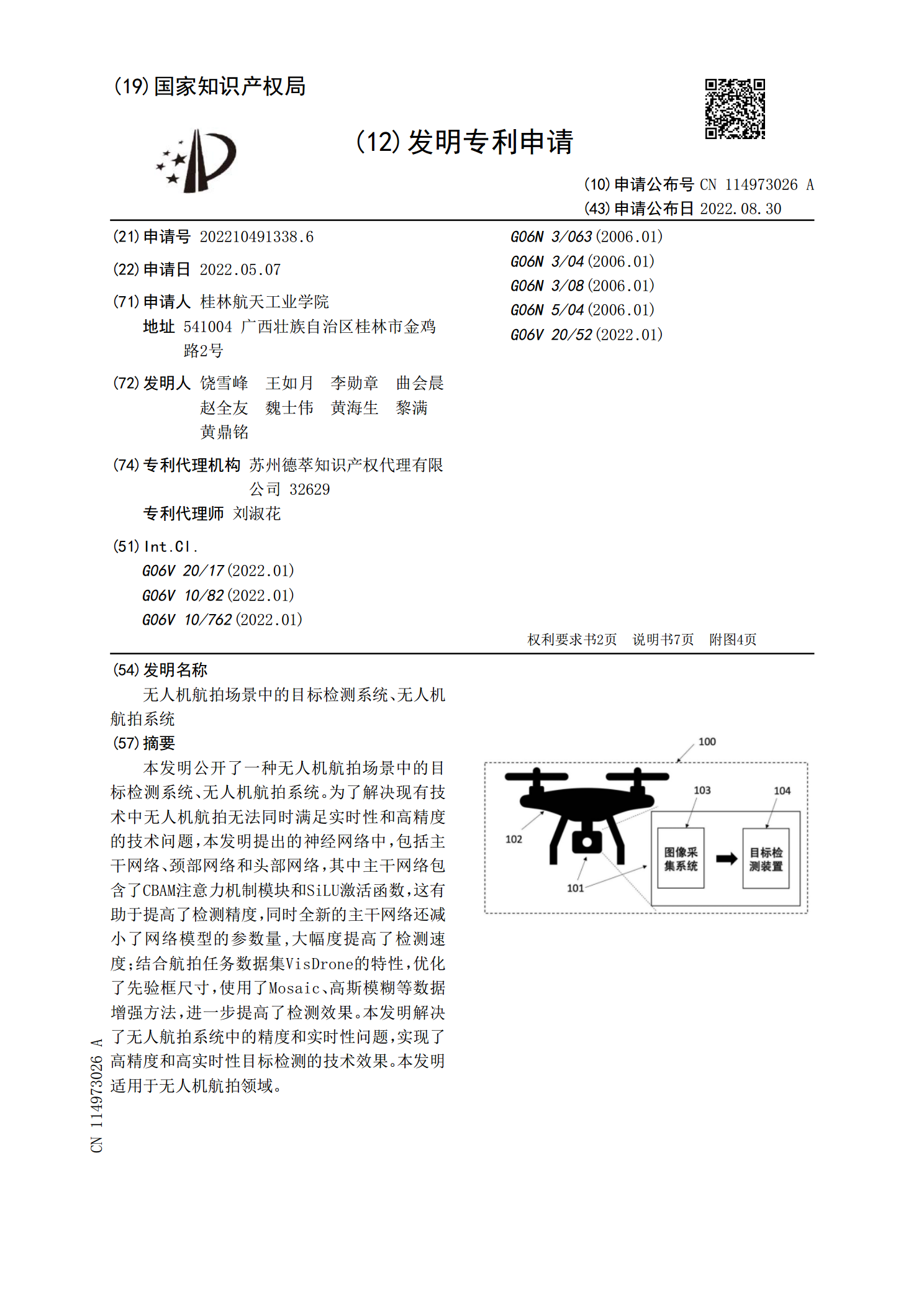
本发明公开了一种无人机航拍装置以及航拍控制系统,包括无人机外壳,所述无人机外壳上固定飞行组件并用于带动,无人机外壳内设置的红外摄像组件进行位置调节,无人机外壳上镶嵌防撞保护组件,防撞保护组件用于对无人机外壳紧急降落时进行保护,无人机外壳转动连接支撑存储组件,支撑存储组件可进行收缩至无人机外壳内,无人机外壳镶嵌控制系统,控制系统无线连接位于无人机外壳一侧的远程控制机构。该无人机航拍装置以及航拍控制系统在无人机遇紧急迫降时通过防撞保护组件起到保护作用,对支撑杆直接进行折叠存储及保护,对不同显示器进行限位固定及
《无人机航拍技术》-航拍概述电子教案.pdf
电子教案电子教案制作时间制作人课程名称无人机航拍教材出版社无课题航拍概述总课时数72授课时间授课班级授课地点教室授课人数20人授课类型讲授课授课教师1.了解无人机航拍的起源。教材分析2.了解无人机航拍的特点。学生分析对无人机初步的了解设计理念分组;讲授1知识与技能:掌握特点三维教学2过程与方法:利用讲解,分组合作目标PPT3情感态度与价值观:学会分组合作重点了解无人机航拍的特点。难点了解无人机航拍的特点。教具、学具多媒体教学流程(创设问题情境、自主学习、合作探究、整合拓展、当堂训练、课堂小结)过程方法与学

无人机遥感航拍系统的减震策略分析.docx
无人机遥感航拍系统的减震策略分析无人机遥感航拍系统的减震策略分析摘要:无人机遥感航拍系统在农业、环境监测和地质勘探等领域起着举足轻重的作用。然而,在飞行过程中,无人机会受到各种外部力的干扰,导致图像质量下降,影响遥感航拍系统的性能。因此,本论文着重分析无人机遥感航拍系统的减震策略,旨在提高图像质量和飞行稳定性,从而更好地满足遥感航拍系统的要求。1.引言近年来,无人机技术的迅速发展催生了无人机遥感航拍系统的快速发展。无人机遥感航拍系统以其灵活性、高效性和低成本等优势,成为了遥感应用领域的重要工具。然而,由于

基于无人机航拍的车辆检测系统的任务书.docx
基于无人机航拍的车辆检测系统的任务书一、背景和项目意义随着社会的不断进步和科技的不断提升,交通事故也成为一大难解难题,其中最主要的原因之一是人类的操作错误或者疏忽,然而,迄今为止,没有一个完美的交通控制系统能够解决所有交通问题。目前市场上已经存在了一些车辆检测系统,但是这些系统大多需要进行人工巡视与干预,而这种形式需要较高的人工成本,而且监测与反馈速度也有限,不能实时发现问题并进行系统处理。因此,通过无人机航拍技术来实现车辆检测系统,不仅能够降低人工成本和提升监测反馈速度,而且也极大地提高了检测的覆盖范围