
感应电机的转速估算方法、装置及系统.pdf

冬易****娘子


1/10
2/10

3/10
4/10

5/10

6/10
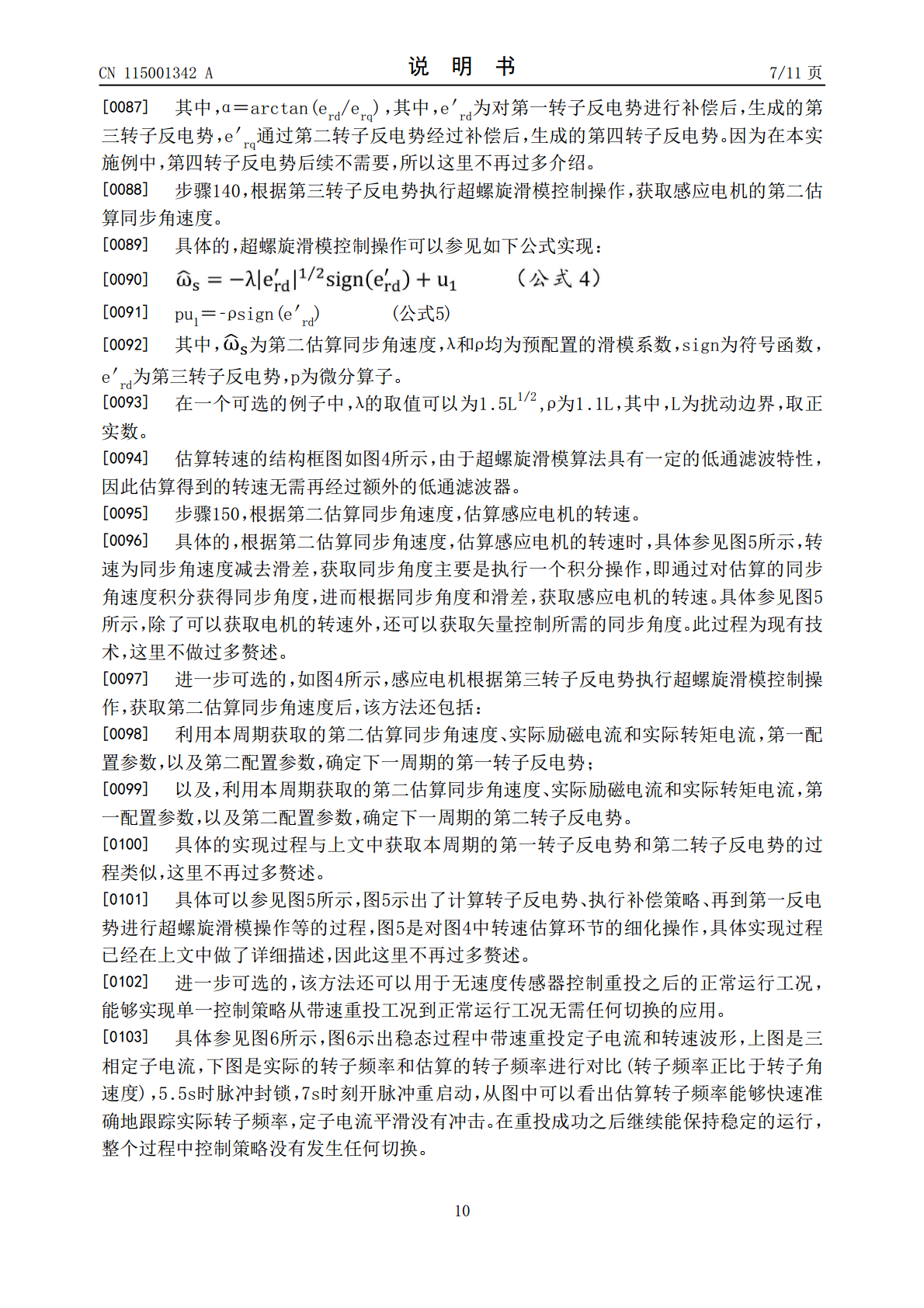
7/10

8/10
9/10
10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
感应电机的转速估算方法、装置及系统.pdf
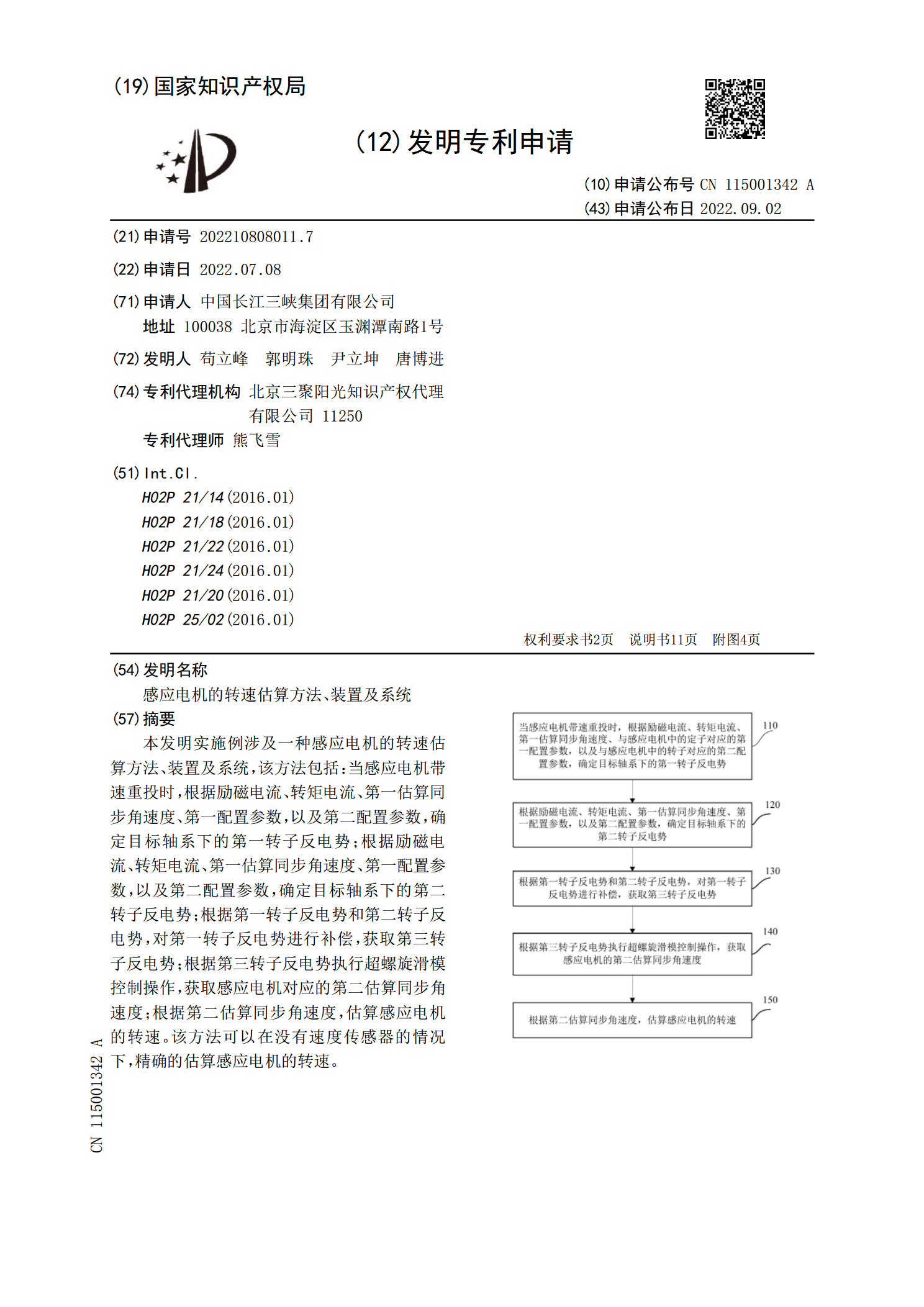
本发明实施例涉及一种感应电机的转速估算方法、装置及系统,该方法包括:当感应电机带速重投时,根据励磁电流、转矩电流、第一估算同步角速度、第一配置参数,以及第二配置参数,确定目标轴系下的第一转子反电势;根据励磁电流、转矩电流、第一估算同步角速度、第一配置参数,以及第二配置参数,确定目标轴系下的第二转子反电势;根据第一转子反电势和第二转子反电势,对第一转子反电势进行补偿,获取第三转子反电势;根据第三转子反电势执行超螺旋滑模控制操作,获取感应电机对应的第二估算同步角速度;根据第二估算同步角速度,估算感应电机的转速
直流电机转速估算方法及系统.pdf
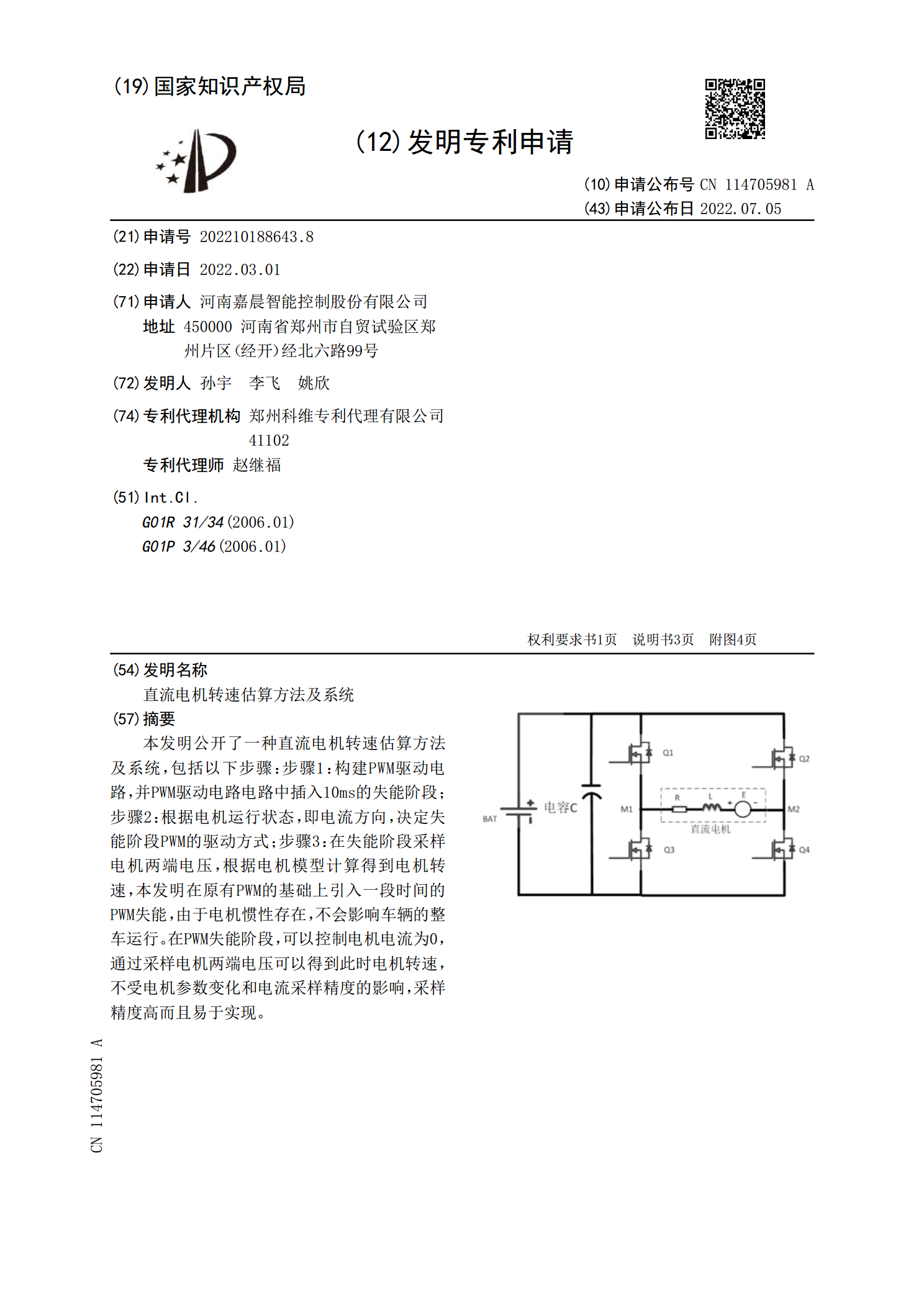
本发明公开了一种直流电机转速估算方法及系统,包括以下步骤:步骤1:构建PWM驱动电路,并PWM驱动电路电路中插入10ms的失能阶段;步骤2:根据电机运行状态,即电流方向,决定失能阶段PWM的驱动方式;步骤3:在失能阶段采样电机两端电压,根据电机模型计算得到电机转速,本发明在原有PWM的基础上引入一段时间的PWM失能,由于电机惯性存在,不会影响车辆的整车运行。在PWM失能阶段,可以控制电机电流为0,通过采样电机两端电压可以得到此时电机转速,不受电机参数变化和电流采样精度的影响,采样精度高而且易于实现。
感应电机全阶磁链观测器和转速估算方法研究.docx
感应电机全阶磁链观测器和转速估算方法研究一、概述作为一种广泛应用于工业领域的电动机类型,其性能优化和精确控制一直是研究热点。全阶磁链观测器和转速估算方法作为感应电机控制中的关键技术,对于提升电机运行效率、实现精确控制具有重要意义。全阶磁链观测器是一种能够实时观测感应电机磁链状态的装置,通过采集电机的电压、电流等信号,利用先进的算法和技术,实现对电机内部磁链的精确估计。这种方法不仅有助于提升电机的运行稳定性,还能为电机的优化控制提供有力支持。转速估算方法则是感应电机控制中的另一项关键技术。由于感应电机的转速
电机转速控制方法及装置.pdf
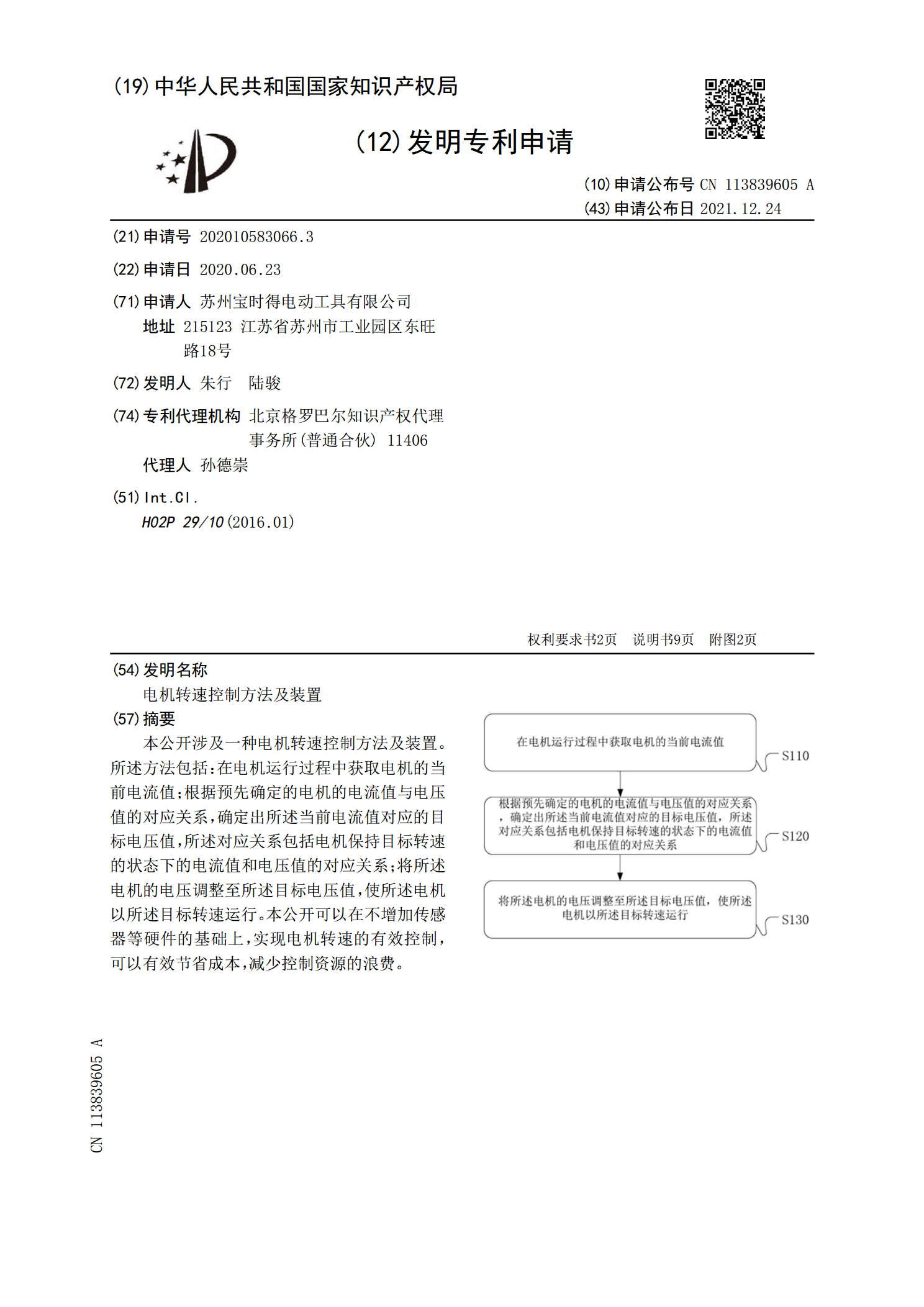
本公开涉及一种电机转速控制方法及装置。所述方法包括:在电机运行过程中获取电机的当前电流值;根据预先确定的电机的电流值与电压值的对应关系,确定出所述当前电流值对应的目标电压值,所述对应关系包括电机保持目标转速的状态下的电流值和电压值的对应关系;将所述电机的电压调整至所述目标电压值,使所述电机以所述目标转速运行。本公开可以在不增加传感器等硬件的基础上,实现电机转速的有效控制,可以有效节省成本,减少控制资源的浪费。

用于感应电机转速估计的感应线圈设计方法.docx
用于感应电机转速估计的感应线圈设计方法Title:DesignMethodforInductionCoilsusedinInductionMotorSpeedEstimationAbstract:Thispaperpresentsadesignmethodforinductioncoilsusedinthespeedestimationofinductionmotors.Theperformanceofaninductionmotorheavilyreliesonaccuratespeedcontrol,