
一种机械手臂的控制方法、装置和系统.pdf

小宏****aa


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共23页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种机械手臂的控制方法、装置和系统.pdf
本申请涉及人工智能技术领域,特别涉及一种机械手臂的控制方法、装置和系统;控制方法包括:获取目标区域内的第一数据对;第一数据对包括第一触觉数据以及第一嗅觉数据;基于第一触觉数据以及第一嗅觉数据进行对象识别,得到第一对象识别结果;在第一对象识别结果指示目标区域内存在目标对象的情况下,确定目标对象的对象掩埋状态;基于目标对象的对象掩埋状态,确定机械手臂的工作模式;本申请中通过采用第一数据对进行对象识别,提高机械手臂识别智能系统的精确性,从而以使机械手臂能够基于精准的识别结果进行工作模式选择,从而提高机械手臂的救

机械手臂控制方法、装置、系统和电子设备.pdf
本申请实施例提供了一种机械手臂控制方法、装置、系统和电子设备,该机械手臂控制方法包括:接收来自手持控制器的第一触发信号,其中,第一触发信号在手持控制器上的模式切换按键被触发后发送,手持控制器上包括用于控制机械手臂运动的至少一个运动控制按键;根据预先创建的触发信号与代码的对应关系,确定与第一触发信号相对应的模式切换代码;根据模式切换代码生成第一模式切换指令;将第一模式切换指令发送给机械手臂,使机械手臂进入手动控制模式,其中,在手动控制模式下机械手臂包括的至少一个连杆可在外力作用下运动,使机械手臂的末端在三维

机械手臂运动控制方法、装置、系统和电子设备.pdf
本申请实施例提供了一种机械手臂运动控制方法、装置、系统和电子设备,该机械手臂运动控制方法包括:接收来自手持控制器的运动触发信号,其中手持控制器上不同的按键被触发后产生不同的触发信号;根据运动触发信号,生成用于控制机械手臂运动的控制指令,其中,机械手臂包括机座和N个连杆,N个连杆中第1连杆的首部与机座相连接,第i连杆的首部与第i?1连杆的尾部相连接,N为大于或等于3的正整数,i为大于1且小于或等于N的正整数;将控制指令发送给机械手臂,以控制第1连杆至第N?1连杆中的至少一个连杆进行相对机座进行运动,使N个连
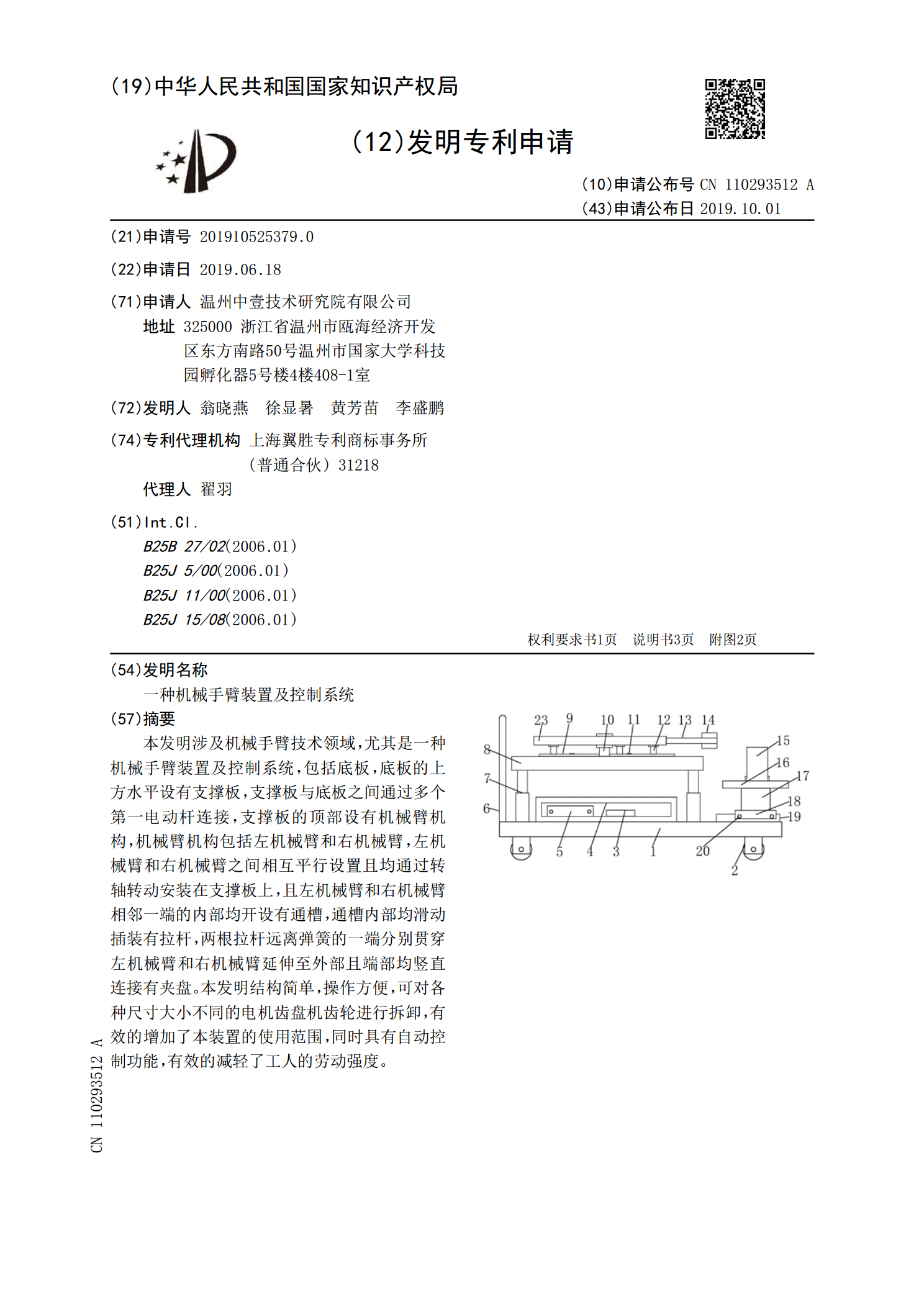
一种机械手臂装置及控制系统.pdf
本发明涉及机械手臂技术领域,尤其是一种机械手臂装置及控制系统,包括底板,底板的上方水平设有支撑板,支撑板与底板之间通过多个第一电动杆连接,支撑板的顶部设有机械臂机构,机械臂机构包括左机械臂和右机械臂,左机械臂和右机械臂之间相互平行设置且均通过转轴转动安装在支撑板上,且左机械臂和右机械臂相邻一端的内部均开设有通槽,通槽内部均滑动插装有拉杆,两根拉杆远离弹簧的一端分别贯穿左机械臂和右机械臂延伸至外部且端部均竖直连接有夹盘。本发明结构简单,操作方便,可对各种尺寸大小不同的电机齿盘机齿轮进行拆卸,有效的增加了本装
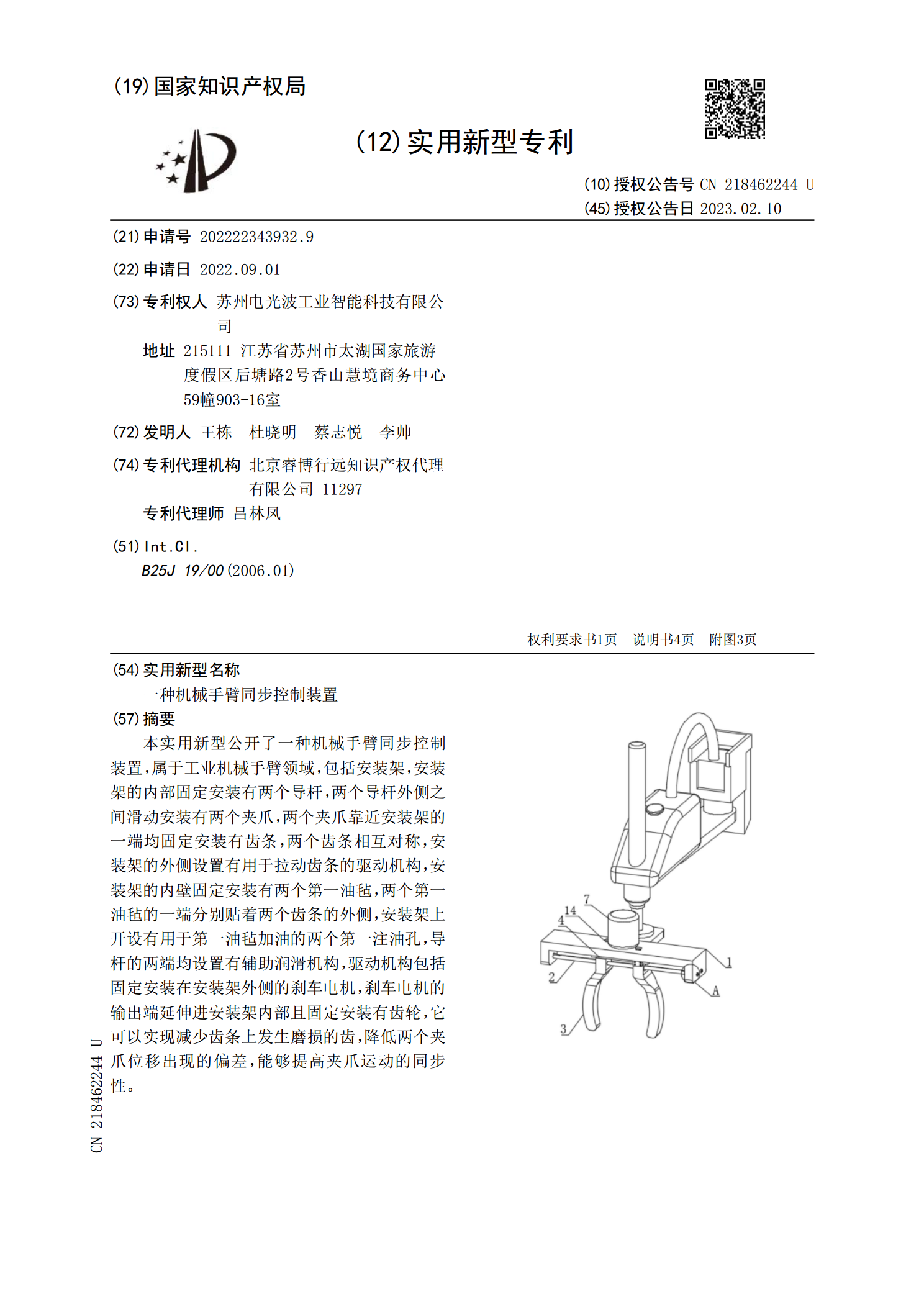
一种机械手臂同步控制装置.pdf
本实用新型公开了一种机械手臂同步控制装置,属于工业机械手臂领域,包括安装架,安装架的内部固定安装有两个导杆,两个导杆外侧之间滑动安装有两个夹爪,两个夹爪靠近安装架的一端均固定安装有齿条,两个齿条相互对称,安装架的外侧设置有用于拉动齿条的驱动机构,安装架的内壁固定安装有两个第一油毡,两个第一油毡的一端分别贴着两个齿条的外侧,安装架上开设有用于第一油毡加油的两个第一注油孔,导杆的两端均设置有辅助润滑机构,驱动机构包括固定安装在安装架外侧的刹车电机,刹车电机的输出端延伸进安装架内部且固定安装有齿轮,它可以实现减