
一种基于机器视觉的车道流量分类方法及系统.pdf

书生****文章

1/10
2/10
3/10

4/10

5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于机器视觉的车道流量分类方法及系统.pdf
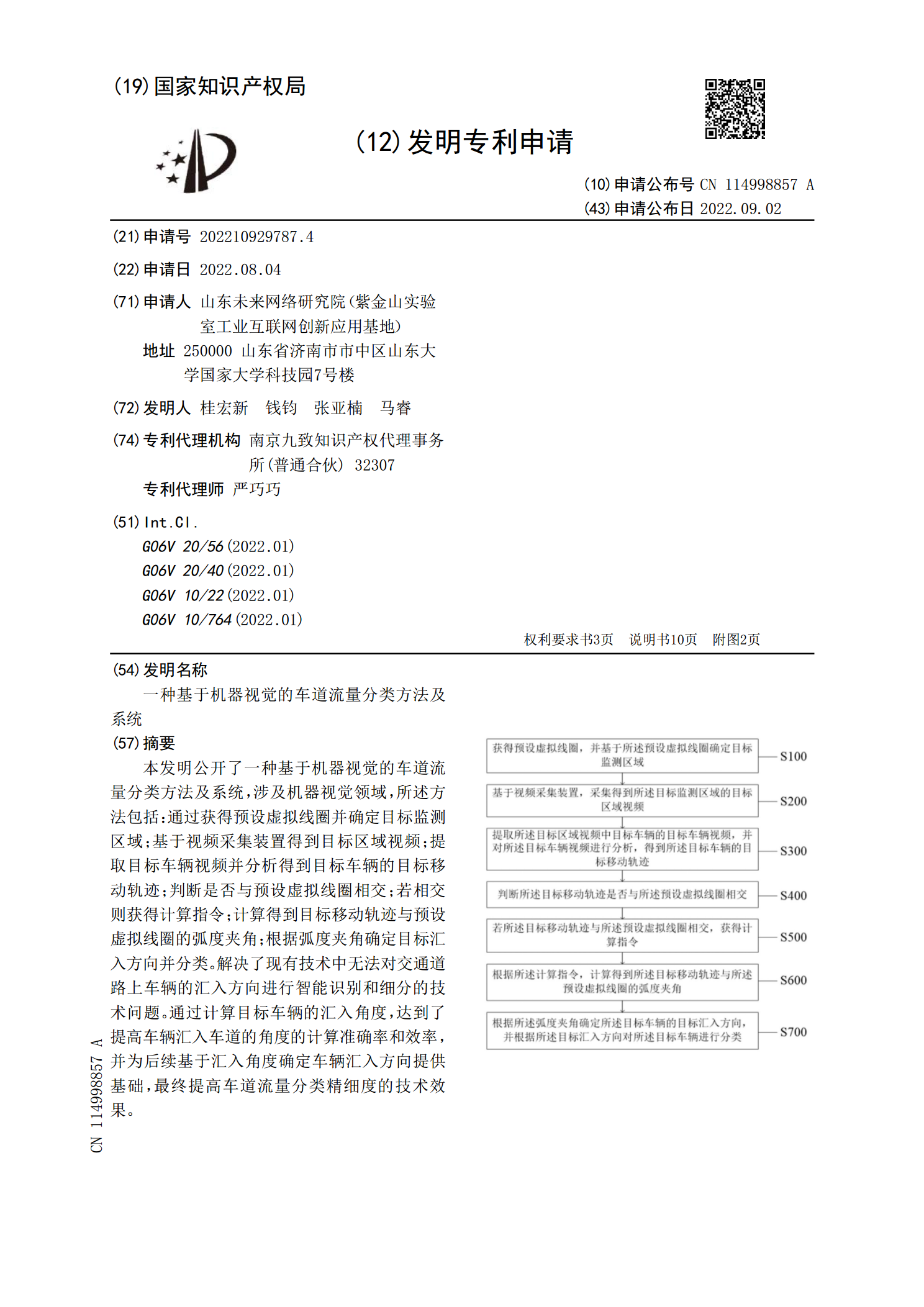
本发明公开了一种基于机器视觉的车道流量分类方法及系统,涉及机器视觉领域,所述方法包括:通过获得预设虚拟线圈并确定目标监测区域;基于视频采集装置得到目标区域视频;提取目标车辆视频并分析得到目标车辆的目标移动轨迹;判断是否与预设虚拟线圈相交;若相交则获得计算指令;计算得到目标移动轨迹与预设虚拟线圈的弧度夹角;根据弧度夹角确定目标汇入方向并分类。解决了现有技术中无法对交通道路上车辆的汇入方向进行智能识别和细分的技术问题。通过计算目标车辆的汇入角度,达到了提高车辆汇入车道的角度的计算准确率和效率,并为后续基于汇入

基于机器视觉的车道偏离报警系统.docx
基于机器视觉的车道偏离报警系统摘要:车道偏离是目前道路交通事故的重要原因之一。因此,开发一种能够及时发现车道偏离并提前预警驾驶员的车道偏离报警系统非常重要。机器视觉技术是一种有效的方法来解决这个问题。本文将介绍一个基于机器视觉的车道偏离报警系统,包括图像采集、图像处理、车道识别以及报警系统实现等方面的内容。关键词:车道偏离,机器视觉,图像采集,图像处理,车道识别,报警系统引言:道路交通事故是一件严重的事情,常常导致生命和财产的损失。车道偏离是造成道路交通事故的重要原因之一。因此,开发一种能够及时发现车道偏
基于机器视觉的车道偏离报警系统.pdf
第39卷第5期东南大学学报(自然科学版)VO1.39NO.52009年9月JOURNALOFSOUTHEASTUNIVERSITY(NaturalScienceEdition)Sept.2009doi:10.3969/j.issn.1001—0505.2009.05.012基于机器视觉的车道偏离报警系统于兵张为公龚宗洋(东南大学仪器科学与工程学院,南京210096)摘要:为了提高基于机器视觉车道偏离报警系统的可靠性和实用性,对基于视觉的车道偏离报警系统各个环节的优化做了研究.介绍了基于视觉的车道偏离报警系

一种基于机器视觉的水产品分类方法及系统.pdf
本发明提供了一种基于机器视觉的水产品分类方法及系统,用以解决水产品手工分类精度差、效率低的问题,该方法包括:S10:获取水产品的图像信息,对所述图像信息进行图像预处理,得到所述水产品的图像轮廓面积;S20:获取所述水产品的重量数据,根据所述水产品的重量数据及图像轮廓面积建立预测模型;S30:接收分类信号,获取当前水产品的图像轮廓面积,根据所述预测模型,得到当前水产品的预测重量;S40:根据所述当前水产品的预测重量,对所述当前水产品进行分类。采用本发明,通过机器视觉对水产品的大小进行判断,进一步得到重量信息

基于机器视觉的车道线检测与追踪系统的研究.pptx
汇报人:/目录0102交通拥堵与安全问题机器视觉技术的应用研究目的与意义03机器视觉技术概述车道线检测算法介绍目标追踪算法介绍04系统总体架构设计车道线检测模块设计目标追踪模块设计系统功能测试与验证05实验数据集介绍实验结果展示结果分析性能评估06研究成果总结未来研究方向对交通领域的贡献汇报人: