
用于雷达的道路地图生成方法、装置及存储介质.pdf

Th****84

1/10

2/10
3/10
4/10
5/10

6/10

7/10
8/10

9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
用于雷达的道路地图生成方法、装置及存储介质.pdf
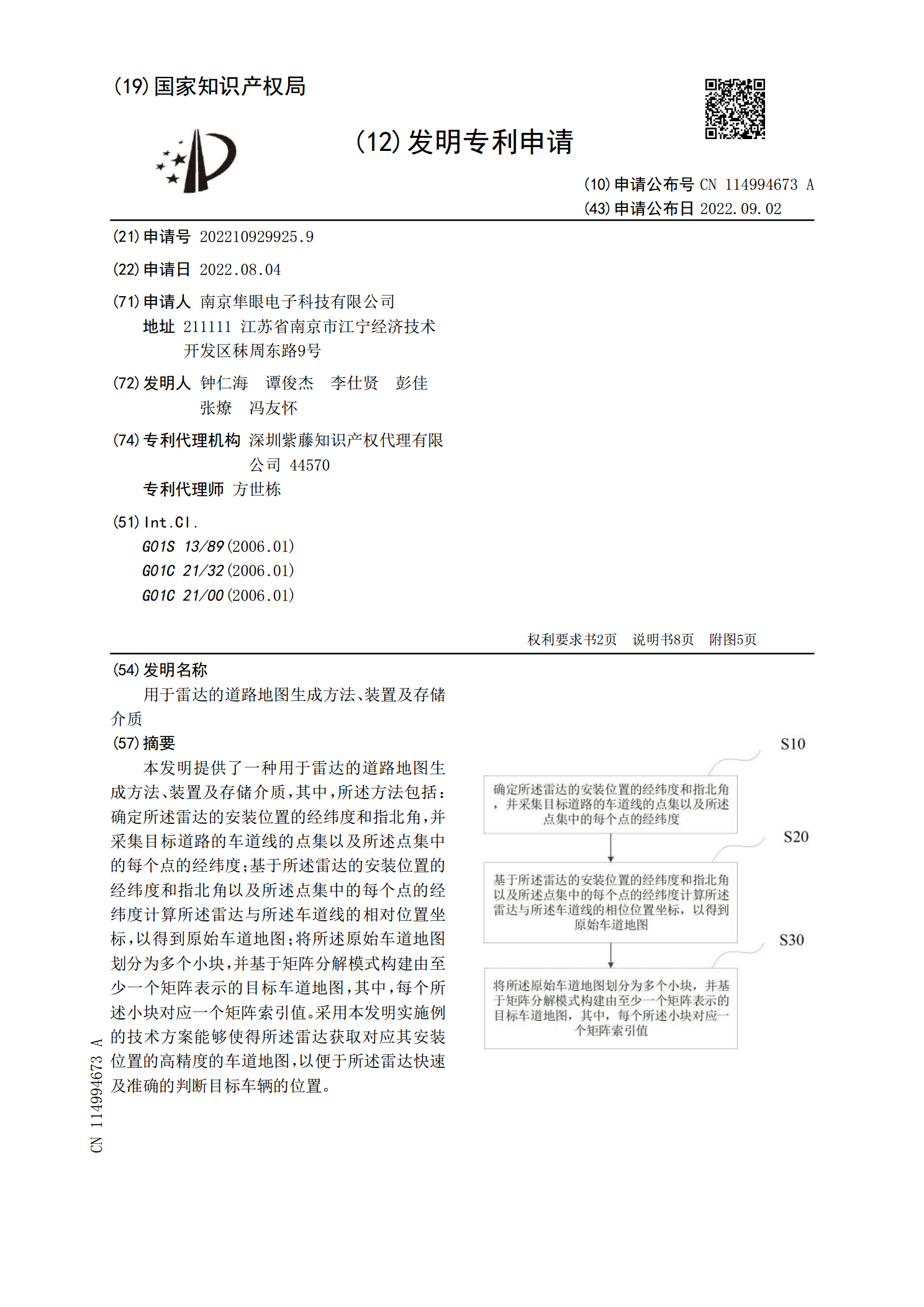
本发明提供了一种用于雷达的道路地图生成方法、装置及存储介质,其中,所述方法包括:确定所述雷达的安装位置的经纬度和指北角,并采集目标道路的车道线的点集以及所述点集中的每个点的经纬度;基于所述雷达的安装位置的经纬度和指北角以及所述点集中的每个点的经纬度计算所述雷达与所述车道线的相对位置坐标,以得到原始车道地图;将所述原始车道地图划分为多个小块,并基于矩阵分解模式构建由至少一个矩阵表示的目标车道地图,其中,每个所述小块对应一个矩阵索引值。采用本发明实施例的技术方案能够使得所述雷达获取对应其安装位置的高精度的车道

音乐地图的生成和显示方法、装置及存储介质.pdf
本发明公开了一种音乐地图的生成方法、装置及存储介质,属于互联网技术领域。所述方法包括:确定M首歌曲中每首歌曲的用户使用信息,根据M首歌曲中每首歌曲的用户使用信息确定每首歌曲的词向量,根据M个词向量,确定M首歌曲中每首歌曲在二维空间中的位置坐标,并根据M首歌曲中每首歌曲的位置坐标生成音乐地图。由于用户使用信息为对应歌曲被用户收听的信息数据,且每首歌曲的词向量为对应歌曲的用户使用信息与M首歌曲中其他歌曲的用户使用信息之间的关联关系,因此,本发明提供的音乐地图实际上根据各个歌曲的用户使用信息确定的,使得音乐地图

地图的生成方法和装置、存储介质及终端.pdf
本发明公开了一种地图的生成方法和装置、存储介质及终端。其中,该方法包括:确定当前地图中第一地块的周围地格,其中,当前地图包括至少一个地块,至少一个地块包括第一地块,至少一个地块中每个地块包括至少一个地格;在周围地格中随机选择至少一个地格加入第一地块,直至第一地块的覆盖面积达到预设面积。本发明解决了相关技术中的地图生成方法娱乐性较弱的技术问题。
地图道路渲染方法、装置、设备及存储介质.pdf
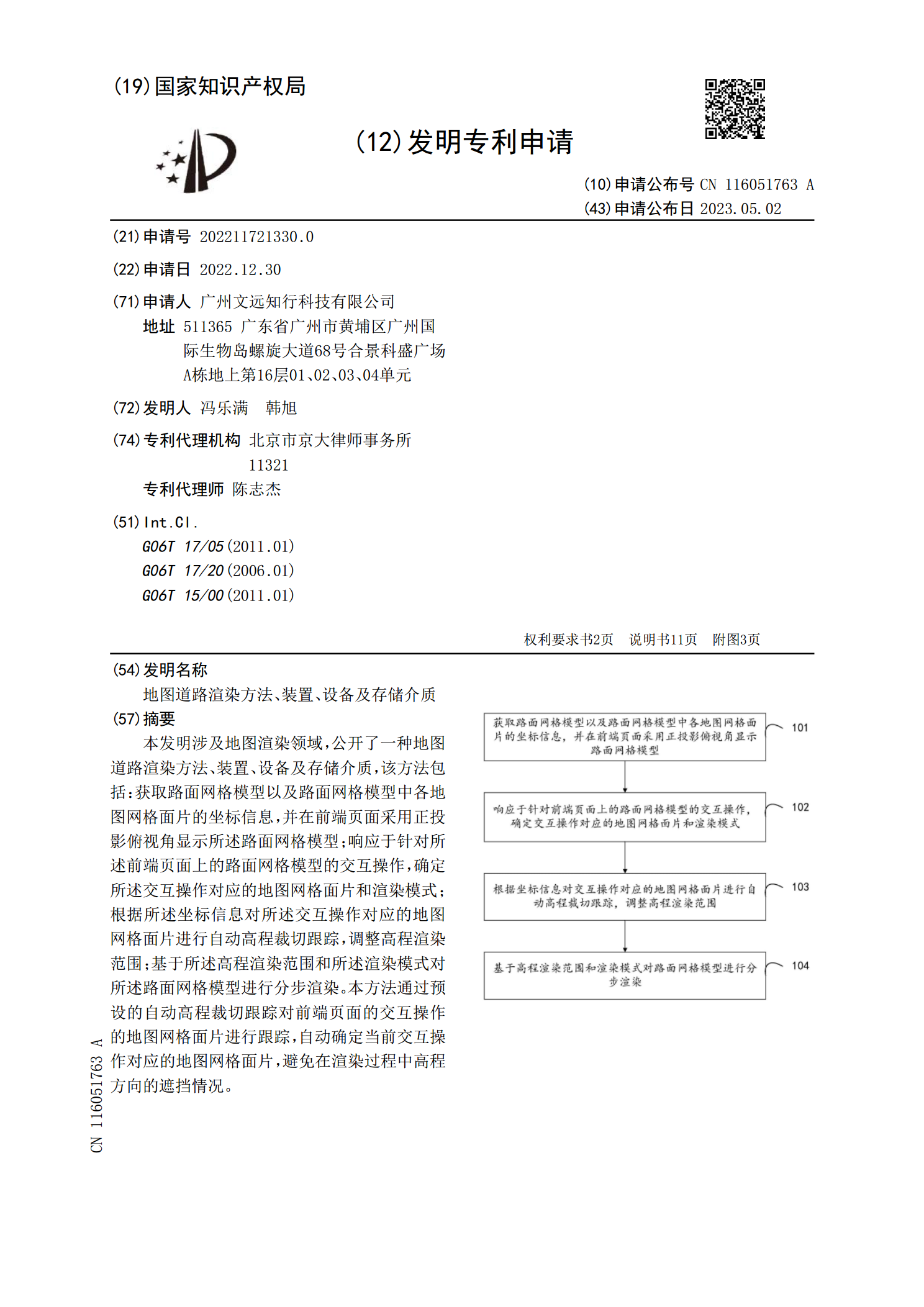
本发明涉及地图渲染领域,公开了一种地图道路渲染方法、装置、设备及存储介质,该方法包括:获取路面网格模型以及路面网格模型中各地图网格面片的坐标信息,并在前端页面采用正投影俯视角显示所述路面网格模型;响应于针对所述前端页面上的路面网格模型的交互操作,确定所述交互操作对应的地图网格面片和渲染模式;根据所述坐标信息对所述交互操作对应的地图网格面片进行自动高程裁切跟踪,调整高程渲染范围;基于所述高程渲染范围和所述渲染模式对所述路面网格模型进行分步渲染。本方法通过预设的自动高程裁切跟踪对前端页面的交互操作的地图网格面
地图道路渲染方法、装置、设备及存储介质.pdf
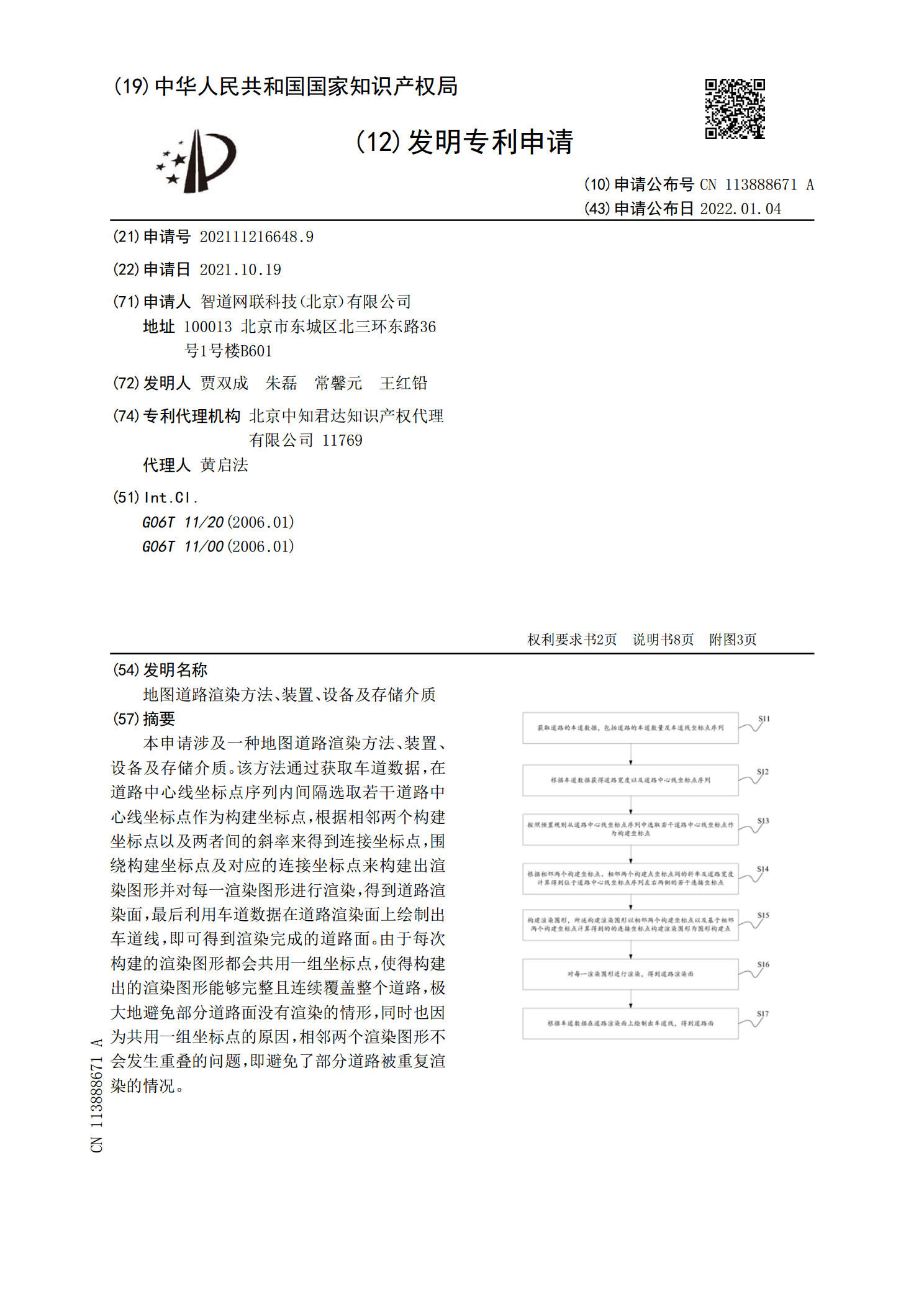
本申请涉及一种地图道路渲染方法、装置、设备及存储介质。该方法通过获取车道数据,在道路中心线坐标点序列内间隔选取若干道路中心线坐标点作为构建坐标点,根据相邻两个构建坐标点以及两者间的斜率来得到连接坐标点,围绕构建坐标点及对应的连接坐标点来构建出渲染图形并对每一渲染图形进行渲染,得到道路渲染面,最后利用车道数据在道路渲染面上绘制出车道线,即可得到渲染完成的道路面。由于每次构建的渲染图形都会共用一组坐标点,使得构建出的渲染图形能够完整且连续覆盖整个道路,极大地避免部分道路面没有渲染的情形,同时也因为共用一组坐标