
基于三角定位的结节定位方法、装置和电子设备.pdf

文阁****23


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于三角定位的结节定位方法、装置和电子设备.pdf
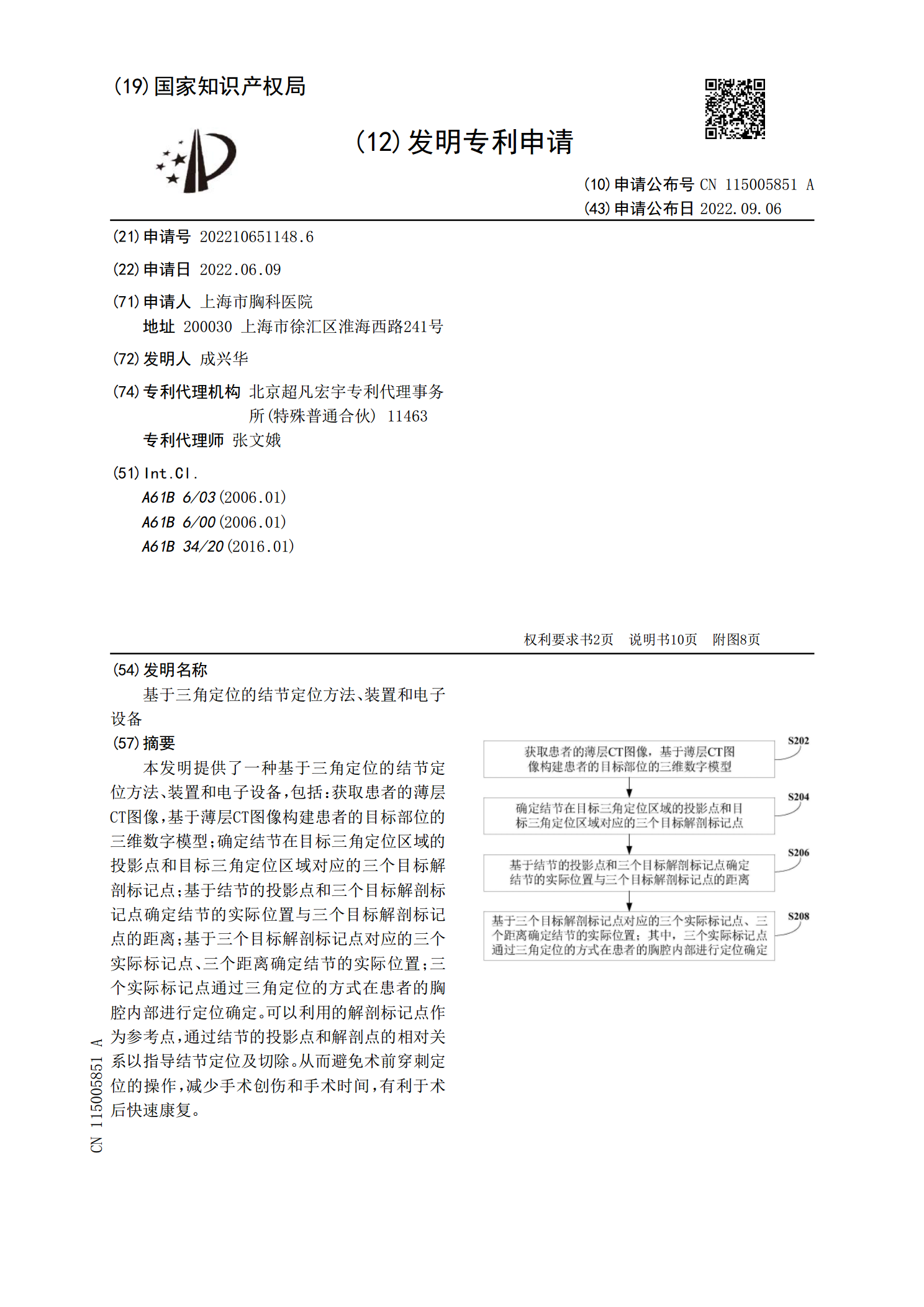
本发明提供了一种基于三角定位的结节定位方法、装置和电子设备,包括:获取患者的薄层CT图像,基于薄层CT图像构建患者的目标部位的三维数字模型;确定结节在目标三角定位区域的投影点和目标三角定位区域对应的三个目标解剖标记点;基于结节的投影点和三个目标解剖标记点确定结节的实际位置与三个目标解剖标记点的距离;基于三个目标解剖标记点对应的三个实际标记点、三个距离确定结节的实际位置;三个实际标记点通过三角定位的方式在患者的胸腔内部进行定位确定。可以利用的解剖标记点作为参考点,通过结节的投影点和解剖点的相对关系以指导结节

基于超声定位的结节定位方法、装置和电子设备.pdf
本发明提供了一种基于超声定位的结节定位方法、装置和电子设备。其中,方法包括:获取患者的薄层CT图像,基于薄层CT图像构建患者的目标部位的三维数字模型;三维数字模型的表面包括多个解剖标记点和基于确定解剖标记点确定的多个多边定位区域,三维数字模型标记有结节;确定结节在目标多边定位区域的投影点和目标多边定位区域对应的多个目标解剖标记点;确定结节的投影点与每个目标解剖标记点的距离;通过超声定位的方式在患者的胸腔外部确定多个目标解剖标记点对应的多个实际标记点的位置;基于多个实际标记点的位置和多个距离确定结节的实际位

结节定位方法、装置和辅助测量工具.pdf
本发明提供了一种结节定位方法、装置和辅助测量工具。其中,该方法包括:获取患者的薄层CT图像,基于薄层CT图像构建患者的目标部位的三维数字模型;其中,三维数字模型中标记有结节;基于三维数字模型确定结节在目标部位表面的投射点和多个解剖标志点;基于投射点、多个解剖标志点和辅助测量工具确定患者的实际结节位置。该方式中仅需一次初始诊断CT进行三维建模,患者全程全身麻醉状态,不涉及穿刺过程,可以减少放射线暴露、减轻患者疼痛、降低风险、防止交叉感染、减少定位时间和人力成本、降低对设备的依赖,有利于肺结节精准切除手术的推
定位方法、定位装置及电子设备.pdf
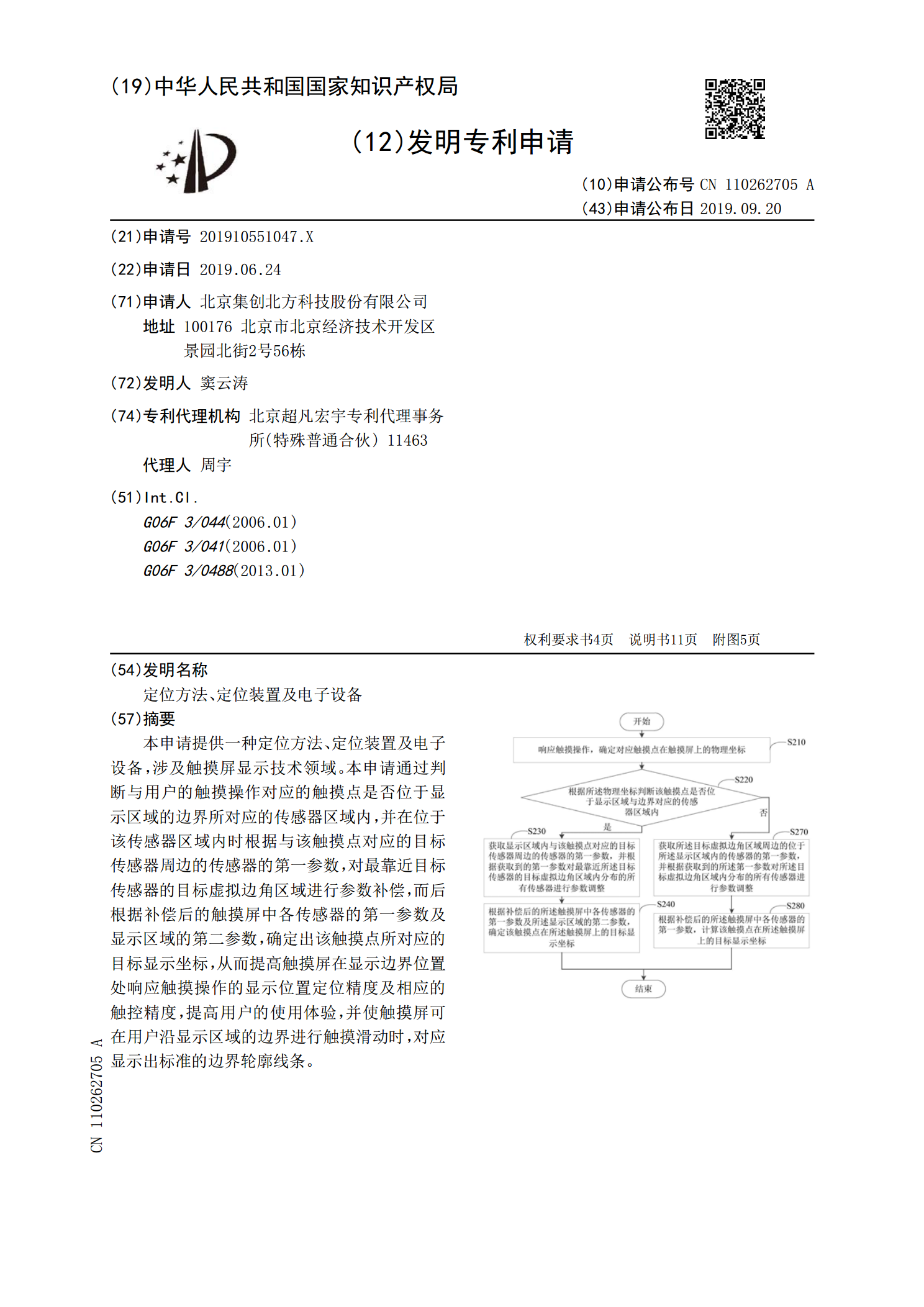
本申请提供一种定位方法、定位装置及电子设备,涉及触摸屏显示技术领域。本申请通过判断与用户的触摸操作对应的触摸点是否位于显示区域的边界所对应的传感器区域内,并在位于该传感器区域内时根据与该触摸点对应的目标传感器周边的传感器的第一参数,对最靠近目标传感器的目标虚拟边角区域进行参数补偿,而后根据补偿后的触摸屏中各传感器的第一参数及显示区域的第二参数,确定出该触摸点所对应的目标显示坐标,从而提高触摸屏在显示边界位置处响应触摸操作的显示位置定位精度及相应的触控精度,提高用户的使用体验,并使触摸屏可在用户沿显示区域的
定位方法、装置和电子设备.pdf
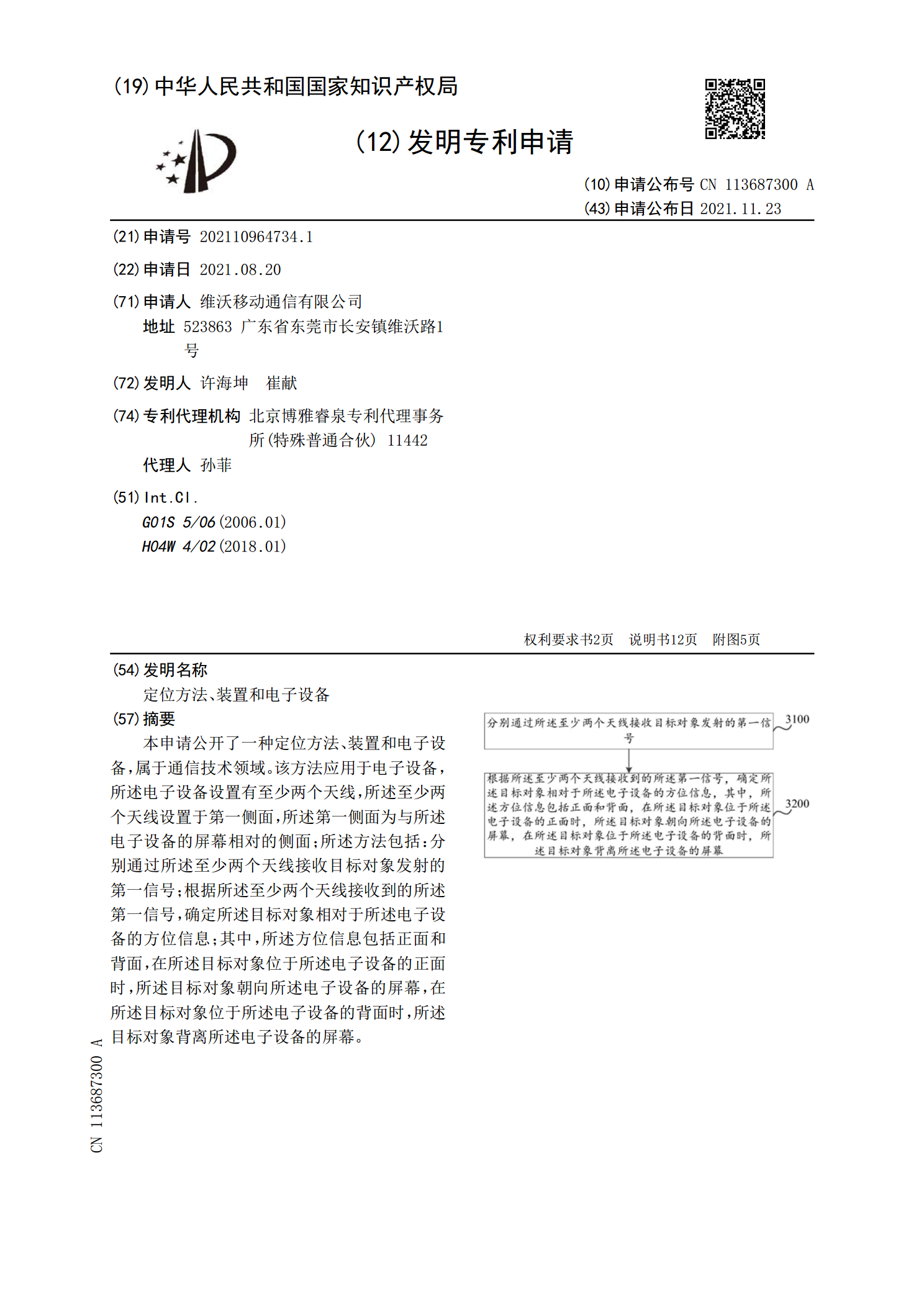
本申请公开了一种定位方法、装置和电子设备,属于通信技术领域。该方法应用于电子设备,所述电子设备设置有至少两个天线,所述至少两个天线设置于第一侧面,所述第一侧面为与所述电子设备的屏幕相对的侧面;所述方法包括:分别通过所述至少两个天线接收目标对象发射的第一信号;根据所述至少两个天线接收到的所述第一信号,确定所述目标对象相对于所述电子设备的方位信息;其中,所述方位信息包括正面和背面,在所述目标对象位于所述电子设备的正面时,所述目标对象朝向所述电子设备的屏幕,在所述目标对象位于所述电子设备的背面时,所述目标对象背