
适用于空气舵与矢量舵的舵机控制飞行器及试验方法.pdf

努力****元恺

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
适用于空气舵与矢量舵的舵机控制飞行器及试验方法.pdf
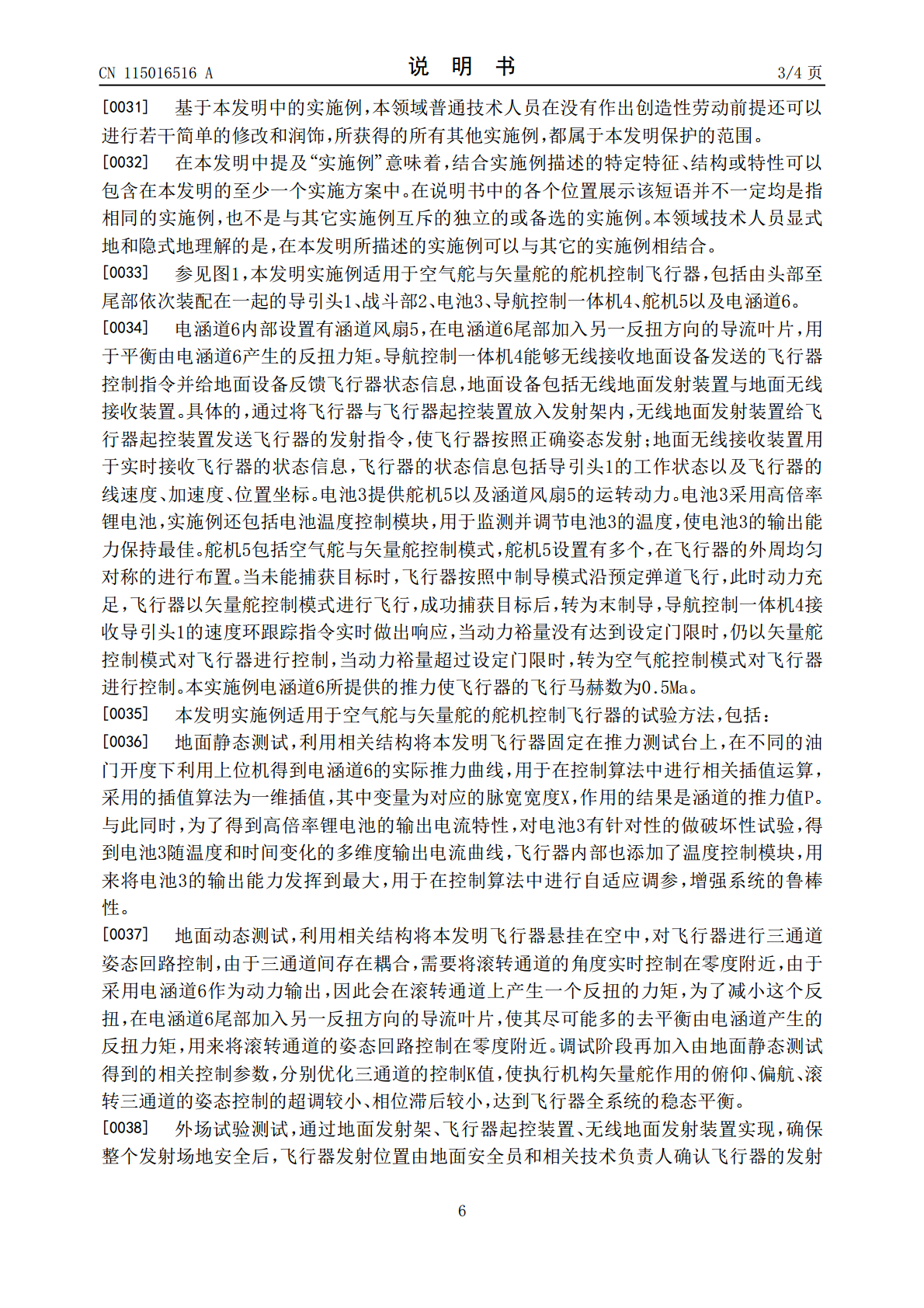
本发明公开了一种适用于空气舵与矢量舵的舵机控制飞行器及试验方法,飞行器包括由头部至尾部依次装配在一起的导引头、战斗部、电池、导航控制一体机、舵机以及电涵道;电涵道内部设有涵道风扇,导航控制一体机能够无线接收地面设备发送的飞行器控制指令并给地面设备反馈飞行器状态信息,电池提供舵机以及涵道风扇的运转动力,舵机包括空气舵与矢量舵控制模式,飞行器发射初期,由矢量舵对飞行器的位置和姿态进行调整,当动力不足时,转为空气舵继续调整飞行器的位置和姿态。本发明飞行器以电涵道作为动力,基本没有热辐射,因此隐蔽性较好,攻击近距
一种飞行器燃气舵与空气舵联动机构.pdf
本发明公开了一种飞行器燃气舵与空气舵联动机构。该机构包括:燃烧室、喷管、喷管外罩、滚珠丝杠传动机构、燃气舵偏转机构、空气舵偏转机构,伺服电机转子通过联轴器与丝杠联接,丝杠转动驱动丝杠螺母直线运动,带动作动杆和活塞作动器控制燃气舵和空气舵联动偏转,偏转角度接近一致;电机固定架与丝杠支撑架通过弧形面与喷管外罩内表面重合固定,丝杠螺母与空气舵之间以缸筒活塞结构配合传动。本发明飞行器燃气舵与空气舵联动机构的结构简便,机械传动稳定,舵片呈十字型布局,舵机可灵活操纵舵片偏转,燃气舵与空气舵联动偏转,极大提高飞行器操纵

导弹舵机舵面系统模态试验方法研究.docx
导弹舵机舵面系统模态试验方法研究引言舵机舵面系统是导弹控制系统中的重要组成部分,其控制性能和可靠性直接影响导弹的飞行性能和命中精度。在导弹发展过程中,加强对舵机舵面系统的研究,对于提高导弹的制导精度,保证导弹安全飞行具有重要意义。本文将从导弹舵机舵面系统模态试验方法研究的角度探讨该方面的研究进展。一、导弹舵机舵面系统模态试验技术的研究现状模态试验技术是一种先进的实验方法,在导弹的舵机舵面系统研究方面得到了广泛的应用。现研究人员在模态试验技术应用中,主要研究了以下内容:1.试验方法在导弹舵机舵面系统模态试验

多舵面集束式电动舵机系统及其控制方法.pdf
本发明涉及一种电动舵机系统及其控制方法,特别是一种多舵面集束式电动舵机系统及其控制方法,其包括限位部分、执行部分、传感部分和控制部分。所述限位部分包括中间体十字架和转接体。所述执行部分包括至少四个电机、若干齿轮和至少四根输出轴。所述传感部分包括至少四个转角位置传感器。依靠所述输出轴安装孔的限位功能,所述中间体十字架、所述输出轴和所述转接体之间的位置得到固定。所述转角位置传感器设置于所述转接体内腔。每个所述转角位置传感器通过转接体上的输出轴安装孔与相应的输出轴固接。与现有技术相比,本发明具有尺寸小、工艺性好

船舶航迹航向--矢量舵智能控制研究.docx
船舶航迹航向--矢量舵智能控制研究船舶航迹航向的矢量舵智能控制研究摘要:船舶航迹航向的控制是航海领域中的重要课题之一。本论文着重研究了船舶航迹航向的矢量舵智能控制方法。通过综合应用控制理论和智能算法,设计了一种基于模糊逻辑和遗传算法的矢量舵智能控制系统。该系统能够根据船舶当前的航速、航向误差和目标航向等信息,实时调整舵角,从而实现船舶的准确航迹控制。实验结果表明,该智能控制系统能够显著提高船舶的航迹控制性能,具有较高的鲁棒性和自适应性。关键词:船舶航迹航向、矢量舵、智能控制、模糊逻辑、遗传算法1.引言船舶