
模块化植入物输送和定位系统.pdf

Ch****75

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共56页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
模块化植入物输送和定位系统.pdf
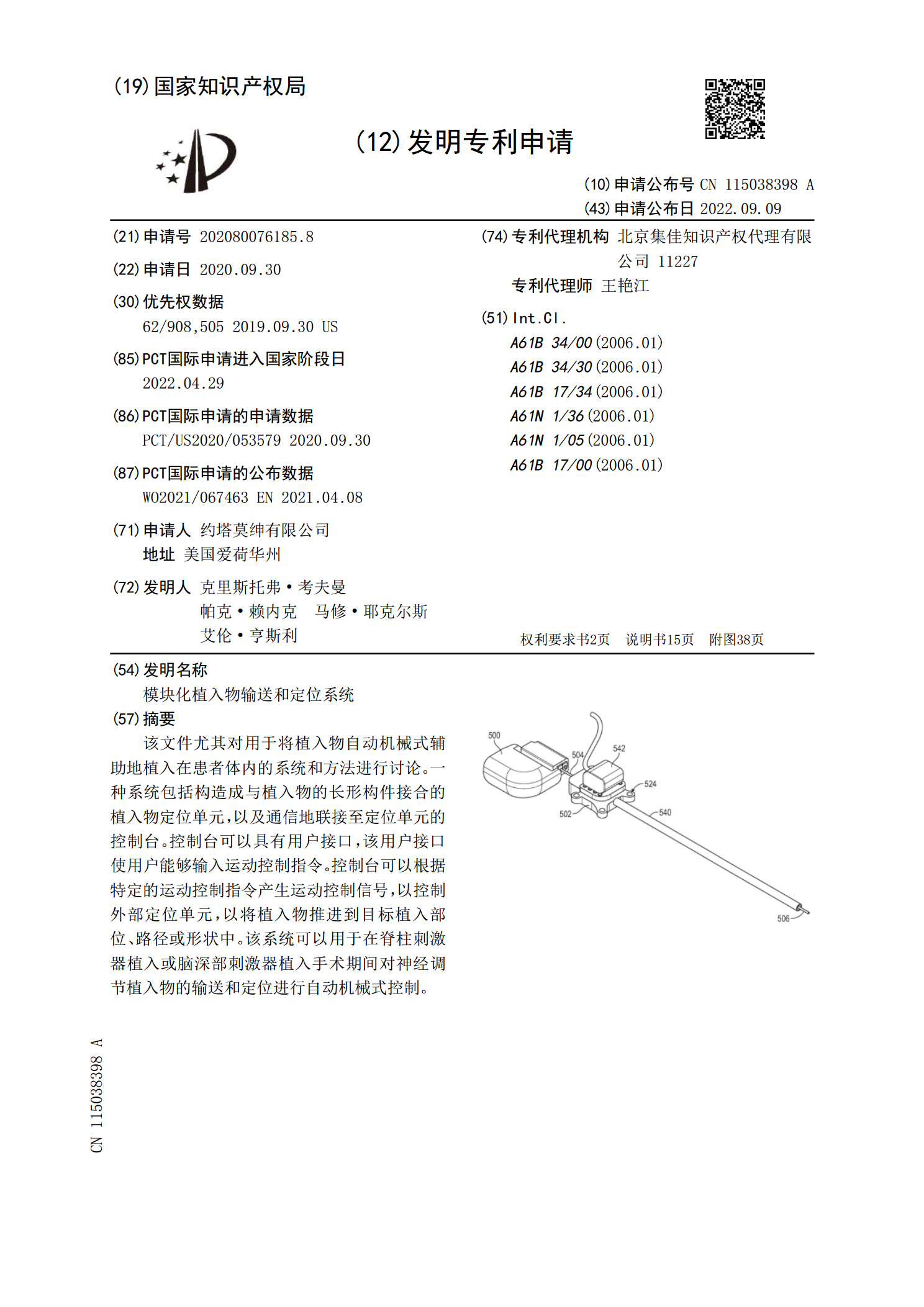
该文件尤其对用于将植入物自动机械式辅助地植入在患者体内的系统和方法进行讨论。一种系统包括构造成与植入物的长形构件接合的植入物定位单元,以及通信地联接至定位单元的控制台。控制台可以具有用户接口,该用户接口使用户能够输入运动控制指令。控制台可以根据特定的运动控制指令产生运动控制信号,以控制外部定位单元,以将植入物推进到目标植入部位、路径或形状中。该系统可以用于在脊柱刺激器植入或脑深部刺激器植入手术期间对神经调节植入物的输送和定位进行自动机械式控制。

模块化植入物输送和定位系统.pdf
该文件讨论了用于将植入物机器人辅助地植入患者体内的系统和方法等。一种系统包括:外部定位单元,其被配置成接合植入物的细长构件;以及控制台,其通信上耦接至外部定位单元。控制台可以具有用户接口,该用户接口使得用户能够输入运动控制指令。控制台可以根据特定的运动控制指令生成用于控制外部定位单元以将植入物推进至目标植入部位的运动控制信号。该系统可以被用于在听力保留耳蜗植入物手术期间机器人式控制耳蜗植入物的输送和定位。

植入物输送系统.pdf
本发明公开了一种植入物输送系统,包括具有啮合机制的植入物;包括含有远端部分之连杆的释放机制,所述释放机制附接到所述植入物的所述啮合机制;以及其构造和布局为操纵所述释放机制使所述释放机制脱离所述植入物的控制机制。本发明提供的植入物输送系统,能够在期望的植入位置进行植入物快速释放。

植入物输送系统.pdf
本发明公开了一种植入物输送系统,包括:一个植入物推送细长轴:具有一个远端开口和一个细长管腔;一个可在植入物推送细长轴的细长管腔内滑动的连杆,所述连杆具有近端和远端;一个在其近端具有接合锚的植入物,所述接合锚在其径向扩展配置时总体轮廓尺寸大于推送细长轴远端开口尺寸,所述接合锚在其径向收缩配置时总体轮廓尺寸小于推送细长轴远端开口尺寸;当连杆的远端接触并向植入物的接合锚施加力时,所述接合锚过渡到其径向扩展配置;当连杆的远端缩回和脱离植入物的接合锚时,所述接合锚恢复其径向收缩配置。本发明提供的植入物输送系统,能够

医疗植入物输送系统和相关方法.pdf
一种植入物输送系统包括固定构件输送系统,所述固定构件输送系统包括细长轴;第一导轨和第二导轨;多个固定构件,其中每个固定构件可滑动地设置在所述第一和第二导轨上;以及致动组件。所述致动组件包括第一细长构件,所述第一细长构件包括沿着所述第一细长构件设置的第一多个接合构件,其中每个接合构件的远端区域与所述固定构件中的一个接合;第二细长构件,所述第二细长构件包括沿着所述第二细长构件设置的第二多个接合构件,其中每个接合构件的远端区域与所述固定构件中的一个接合。另外地,所述致动组件的周期性致动被配置为沿着所述第一导轨和