
覆盖式吸污导航方法、装置、控制终端及存储介质.pdf

猫巷****提格


1/10
2/10

3/10
4/10

5/10

6/10

7/10
8/10
9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
覆盖式吸污导航方法、装置、控制终端及存储介质.pdf
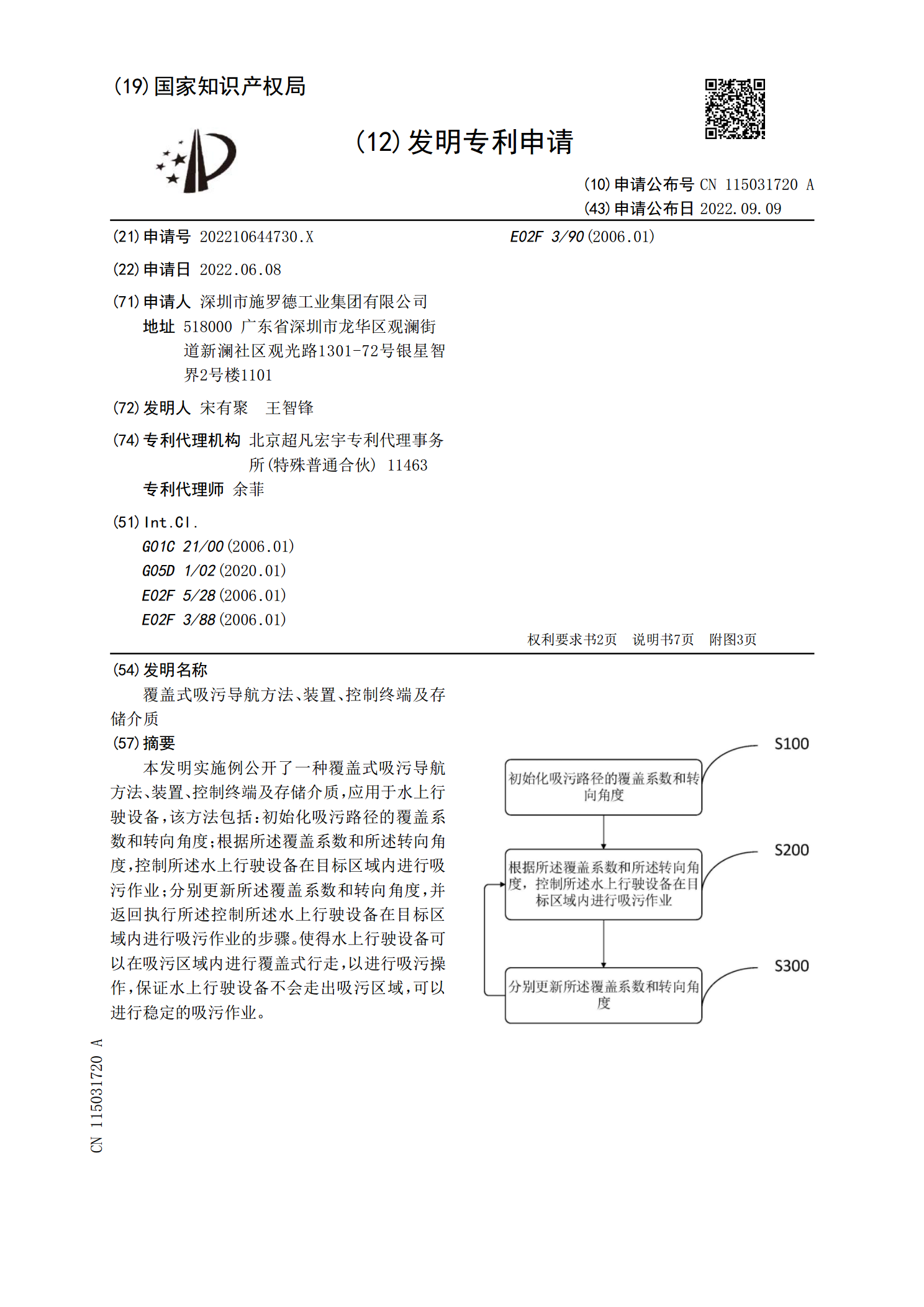
本发明实施例公开了一种覆盖式吸污导航方法、装置、控制终端及存储介质,应用于水上行驶设备,该方法包括:初始化吸污路径的覆盖系数和转向角度;根据所述覆盖系数和所述转向角度,控制所述水上行驶设备在目标区域内进行吸污作业;分别更新所述覆盖系数和转向角度,并返回执行所述控制所述水上行驶设备在目标区域内进行吸污作业的步骤。使得水上行驶设备可以在吸污区域内进行覆盖式行走,以进行吸污操作,保证水上行驶设备不会走出吸污区域,可以进行稳定的吸污作业。
测距导航方法、装置、控制终端及存储介质.pdf
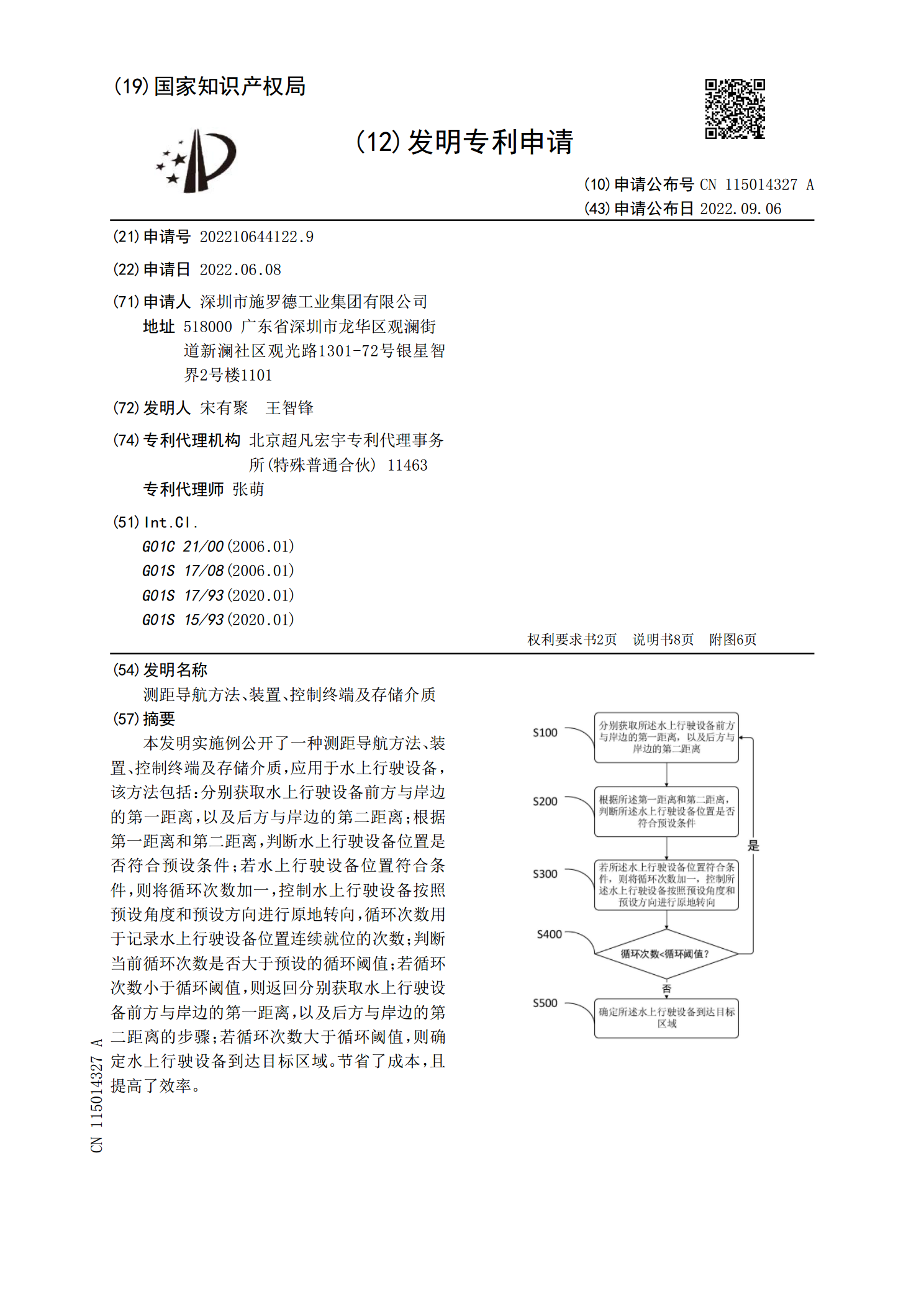
本发明实施例公开了一种测距导航方法、装置、控制终端及存储介质,应用于水上行驶设备,该方法包括:分别获取水上行驶设备前方与岸边的第一距离,以及后方与岸边的第二距离;根据第一距离和第二距离,判断水上行驶设备位置是否符合预设条件;若水上行驶设备位置符合条件,则将循环次数加一,控制水上行驶设备按照预设角度和预设方向进行原地转向,循环次数用于记录水上行驶设备位置连续就位的次数;判断当前循环次数是否大于预设的循环阈值;若循环次数小于循环阈值,则返回分别获取水上行驶设备前方与岸边的第一距离,以及后方与岸边的第二距离的步
导航方法、装置、存储介质及移动终端.pdf
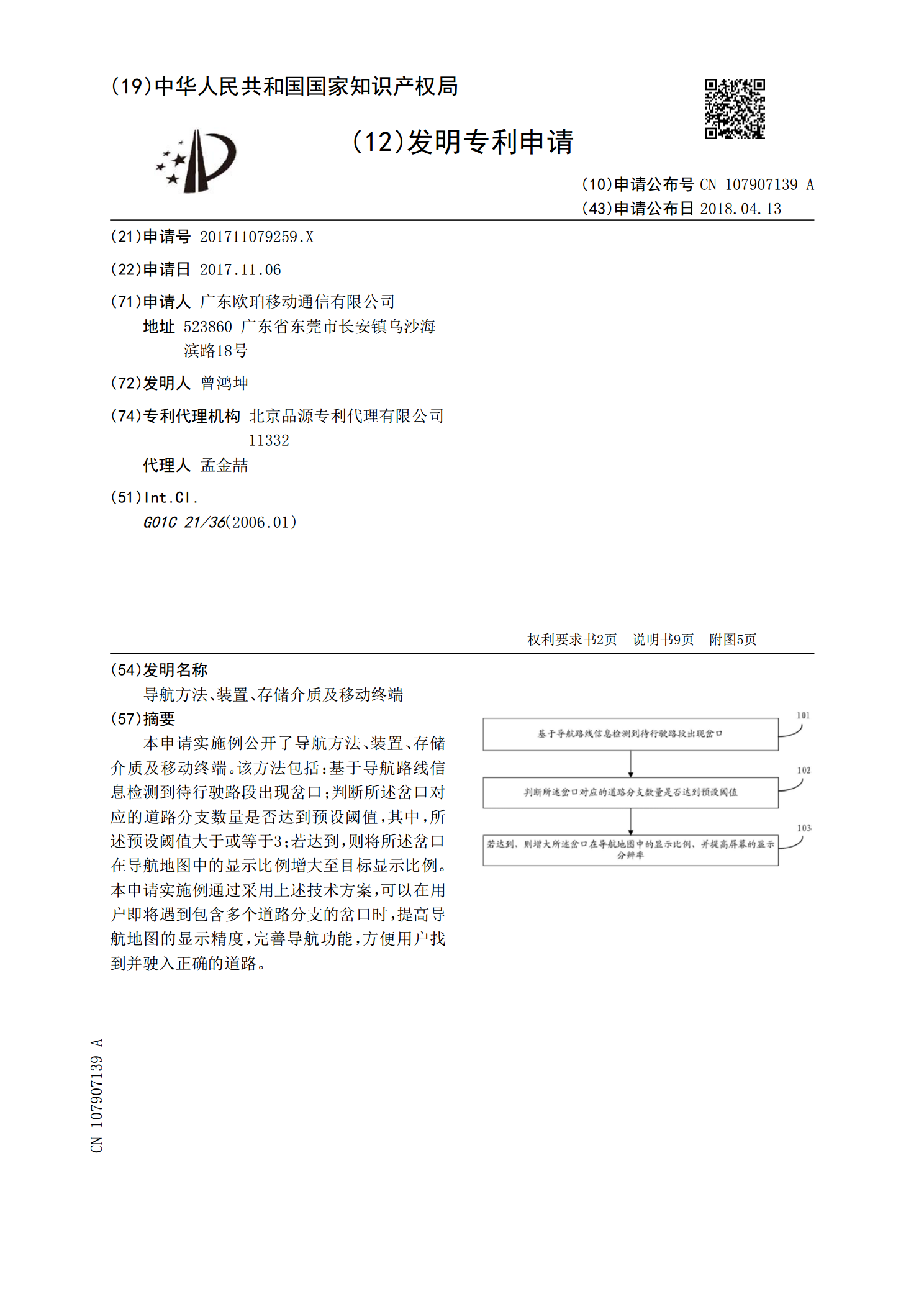
本申请实施例公开了导航方法、装置、存储介质及移动终端。该方法包括:基于导航路线信息检测到待行驶路段出现岔口;判断所述岔口对应的道路分支数量是否达到预设阈值,其中,所述预设阈值大于或等于3;若达到,则将所述岔口在导航地图中的显示比例增大至目标显示比例。本申请实施例通过采用上述技术方案,可以在用户即将遇到包含多个道路分支的岔口时,提高导航地图的显示精度,完善导航功能,方便用户找到并驶入正确的道路。

语音导航控制方法、装置、计算机终端及存储介质.pdf
本发明涉及语音导航领域,公开了一种语音导航控制方法、装置、计算机终端及存储介质,该方法包括:和客户进行语音沟通时,获取并记录客户的语音数据,并对所述语音数据进行语义识别和情绪识别,生成客户画像;根据所述客户画像,分析适合所述客户的相关产品,以及对应的业务话术,将所述业务话术呈现在业务员屏幕上进行提示;若客户进行产品办理,则进行语音办理流程,记录用户的办理语音,并生成确认短信发送给客户;待客户结束语音沟通后,生成推荐信息将所述相关产品推荐给用户。留下了客户交易证据,同时也为业务员的话术做到了提示,尽可能的发
终端的控制方法、装置、终端和存储介质.pdf
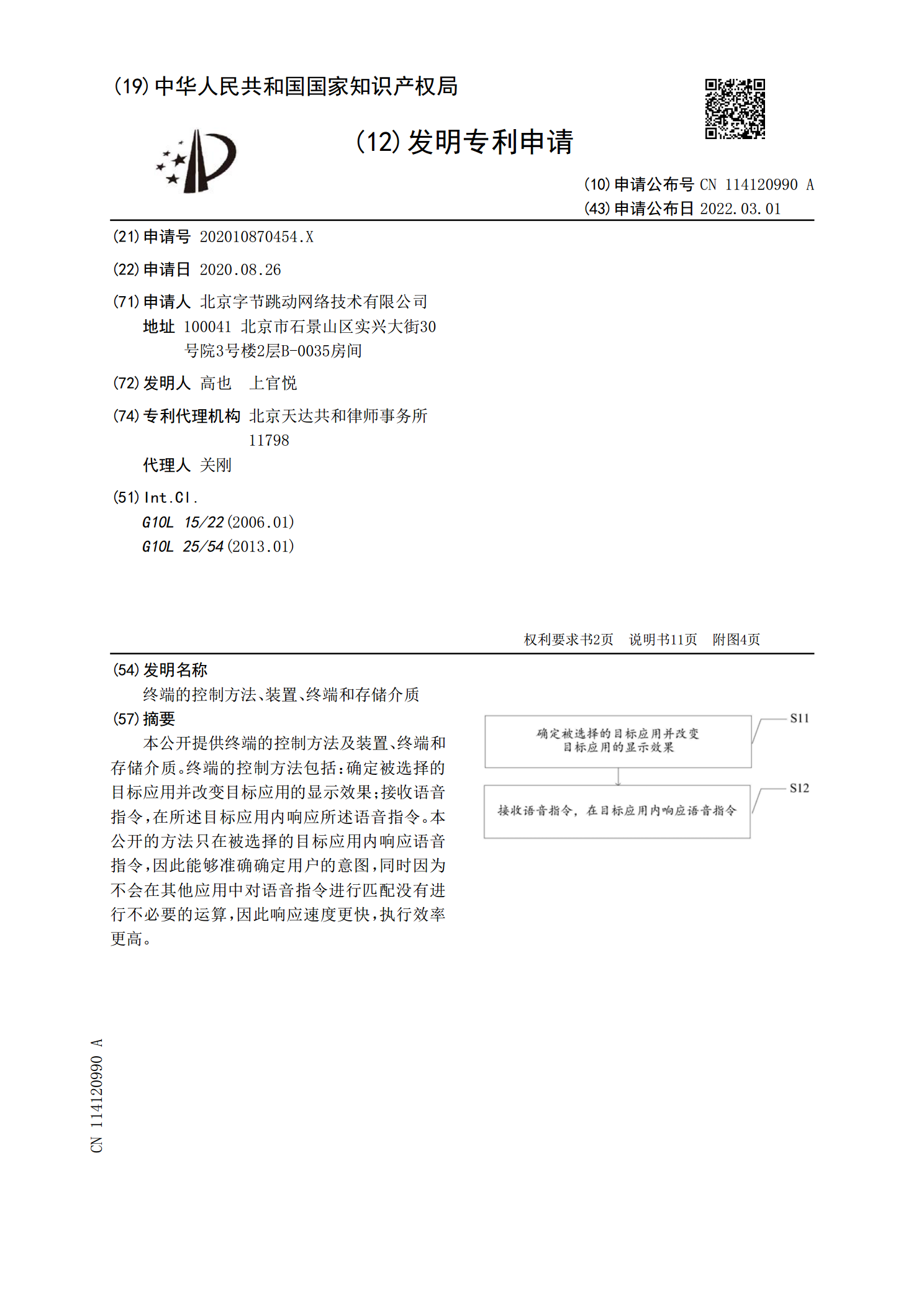
本公开提供终端的控制方法及装置、终端和存储介质。终端的控制方法包括:确定被选择的目标应用并改变目标应用的显示效果;接收语音指令,在所述目标应用内响应所述语音指令。本公开的方法只在被选择的目标应用内响应语音指令,因此能够准确确定用户的意图,同时因为不会在其他应用中对语音指令进行匹配没有进行不必要的运算,因此响应速度更快,执行效率更高。