
一种基于双目视觉与图像分割技术的散装粮随机扦样方法.pdf

是你****盟主

1/9
2/9
3/9
4/9
5/9
6/9

7/9
8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种基于双目视觉与图像分割技术的散装粮随机扦样方法.pdf
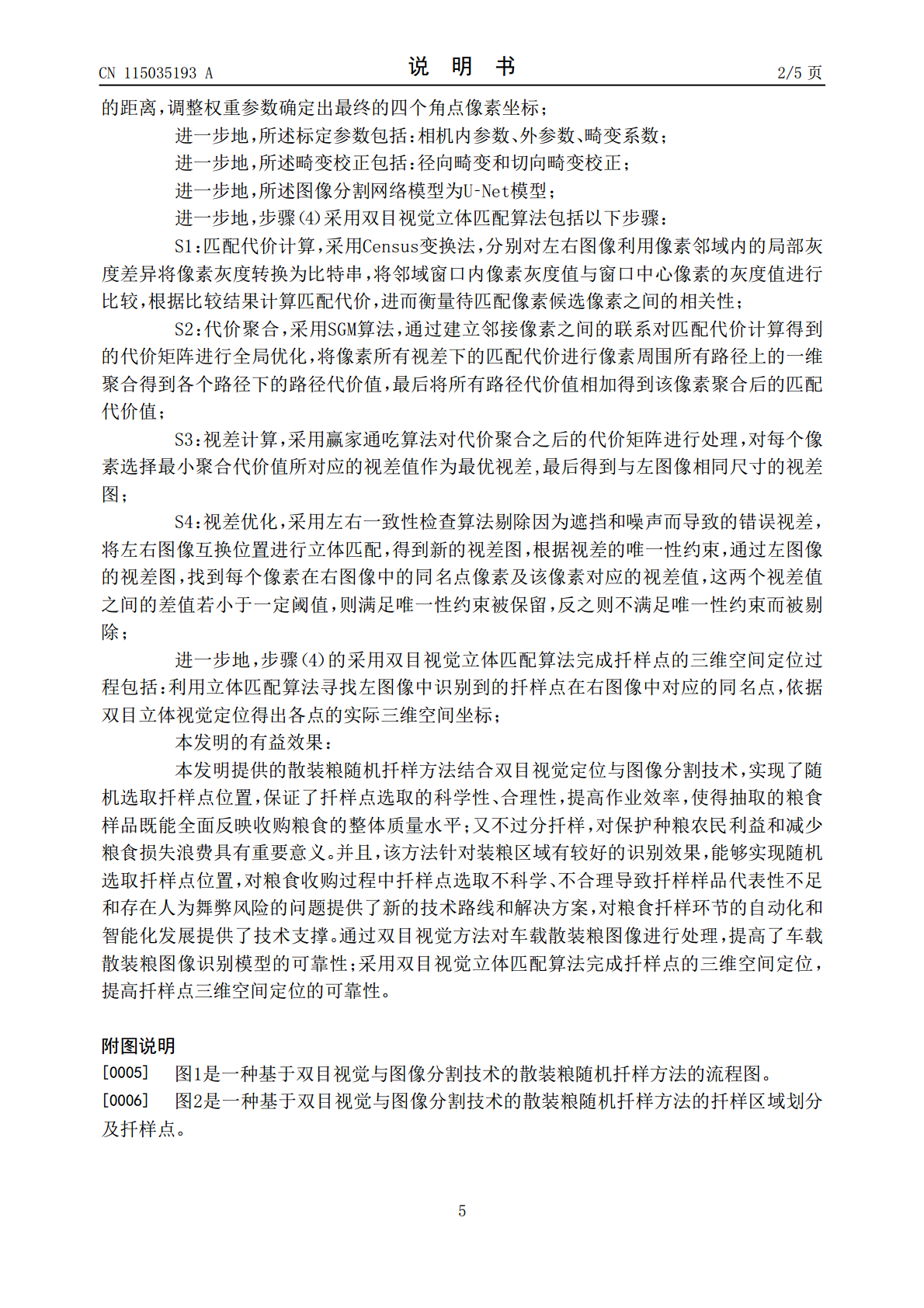
本发明涉及一种基于双目视觉与图像分割技术的散装粮随机扦样方法,首先使用双目相机分别获取散粮运输车装粮区域的左图像和右图像信息并校正,利用图像分割模型对校正后的左图像进行目标分割,识别并计算出装粮车辆粮面区域边界的四个角点像素坐标,并根据扦样规则将粮面区域划分为多个扦样区域,从中随机选取若干扦样区域并以其中心点作为扦样点,计算得到扦样点像素坐标,采用双目视觉立体匹配算法获得扦样点的三维空间世界坐标,从而控制粮食扦样机将扦样杆移动至各扦样点完成随机扦样操作。该方法针对装粮区域有较好的识别效果,能够实现随机选取

一种基于背景建模对双目视觉图像的运动捕捉方法.pdf
本发明是一种基于背景分割对双目视觉图像的运动捕捉方法,可以完成对于人体作为前景的分割,同时对人体的上身躯干部分进行运动捕捉,从而完成人机交互的效果。本方法是在背景建模的基础上,通过对摄像头采集的干净背景进行高斯模型的建立,然后将采集的视频同背景模型进行比较,并通过双目摄像头所获得的深度信息,将场景的每一个像素给定一个属于前景或背景的概率值,并通过图切算法完成对场景前景和背景的分割。在分割前景是人体上身躯干的情况下,通过对前景轮廓的细化、去噪和关键点的确定,获得人体的基本骨架模型,从而完成运动捕捉的过程。
一种基于双目图像的输电线路分割方法.pdf
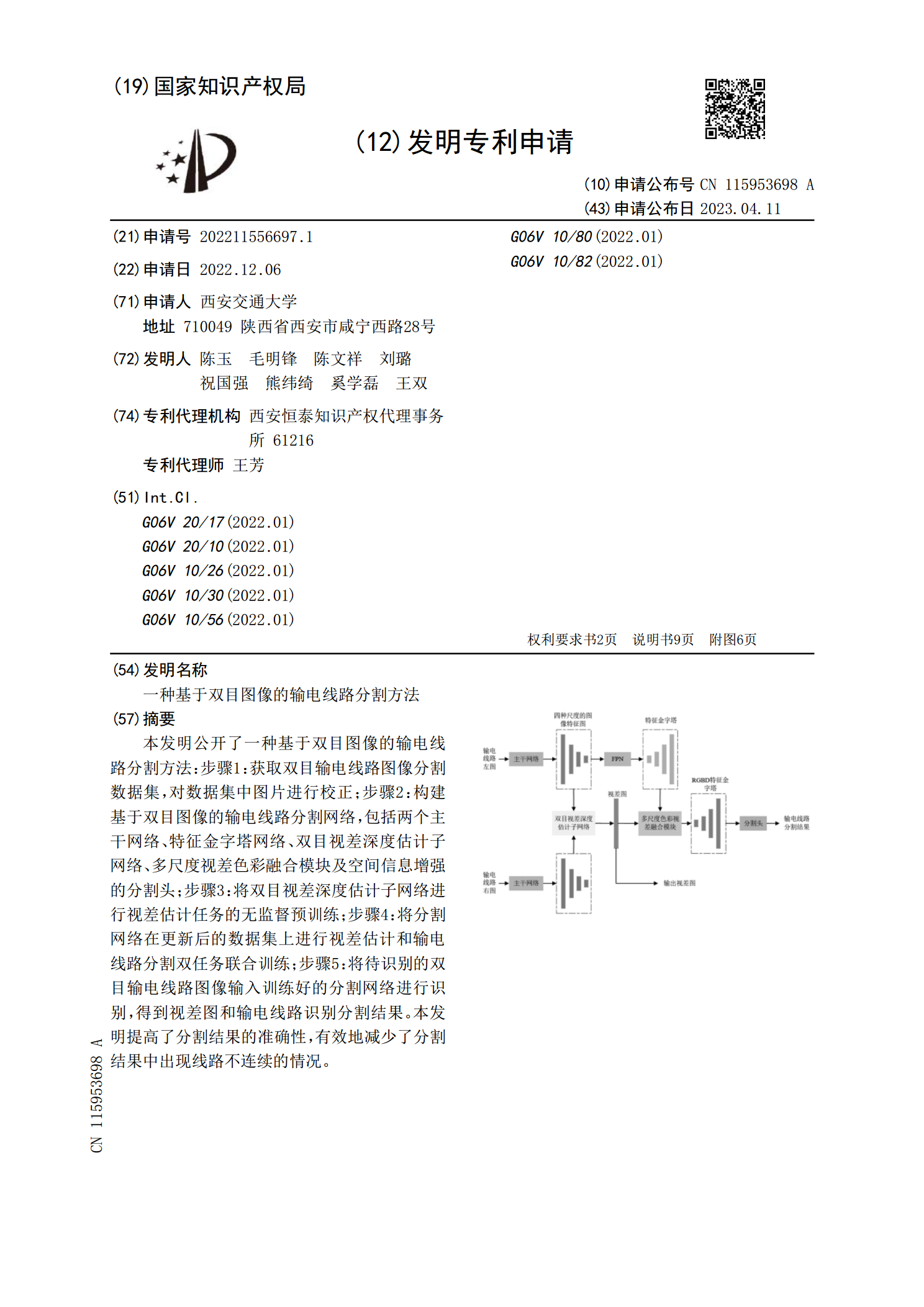
本发明公开了一种基于双目图像的输电线路分割方法:步骤1:获取双目输电线路图像分割数据集,对数据集中图片进行校正;步骤2:构建基于双目图像的输电线路分割网络,包括两个主干网络、特征金字塔网络、双目视差深度估计子网络、多尺度视差色彩融合模块及空间信息增强的分割头;步骤3:将双目视差深度估计子网络进行视差估计任务的无监督预训练;步骤4:将分割网络在更新后的数据集上进行视差估计和输电线路分割双任务联合训练;步骤5:将待识别的双目输电线路图像输入训练好的分割网络进行识别,得到视差图和输电线路识别分割结果。本发明提高
一种基于语义分割的动态环境双目视觉SLAM方法.pdf
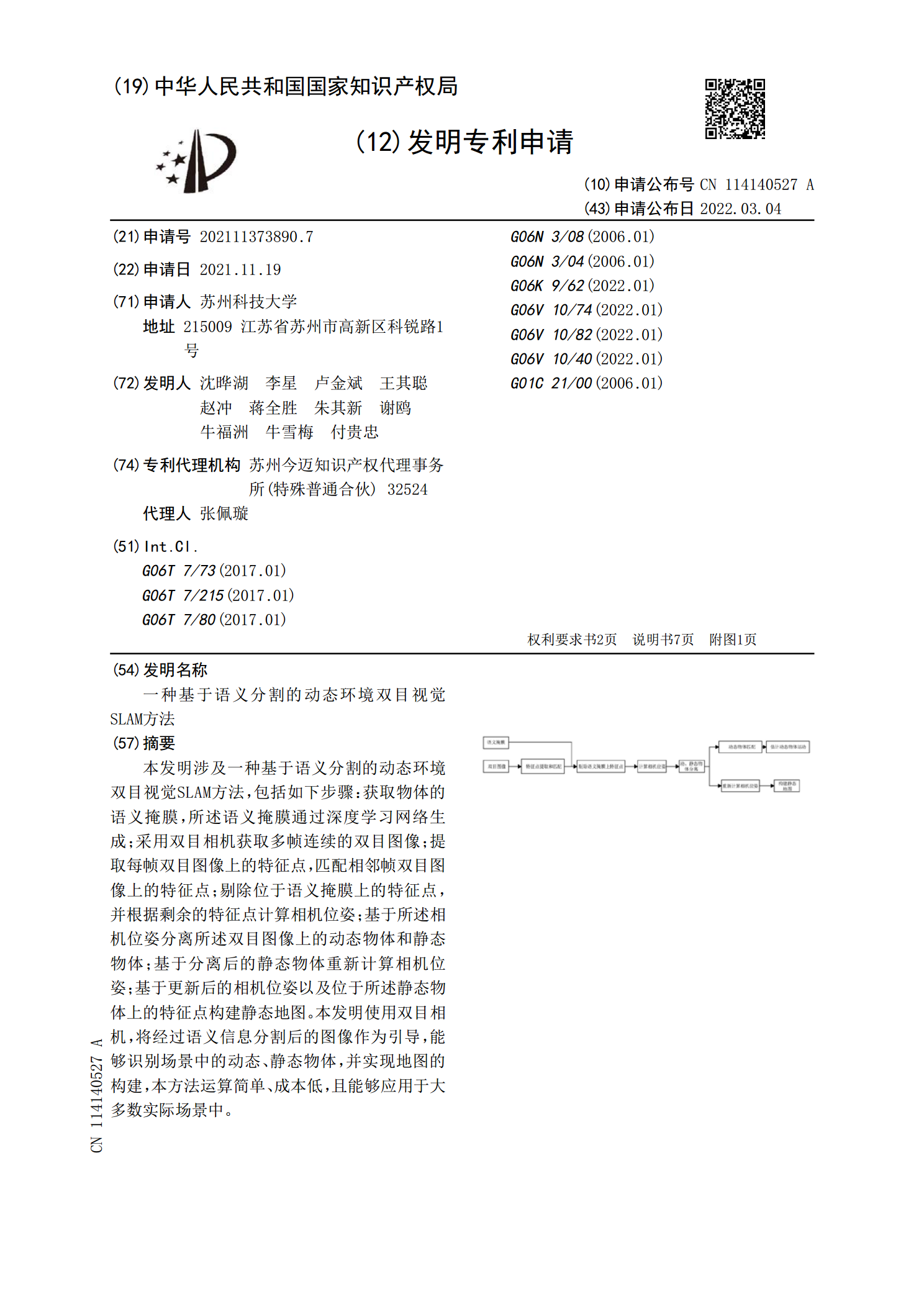
本发明涉及一种基于语义分割的动态环境双目视觉SLAM方法,包括如下步骤:获取物体的语义掩膜,所述语义掩膜通过深度学习网络生成;采用双目相机获取多帧连续的双目图像;提取每帧双目图像上的特征点,匹配相邻帧双目图像上的特征点;剔除位于语义掩膜上的特征点,并根据剩余的特征点计算相机位姿;基于所述相机位姿分离所述双目图像上的动态物体和静态物体;基于分离后的静态物体重新计算相机位姿;基于更新后的相机位姿以及位于所述静态物体上的特征点构建静态地图。本发明使用双目相机,将经过语义信息分割后的图像作为引导,能够识别场景中的
基于视觉显著模型的图像分割方法.pdf
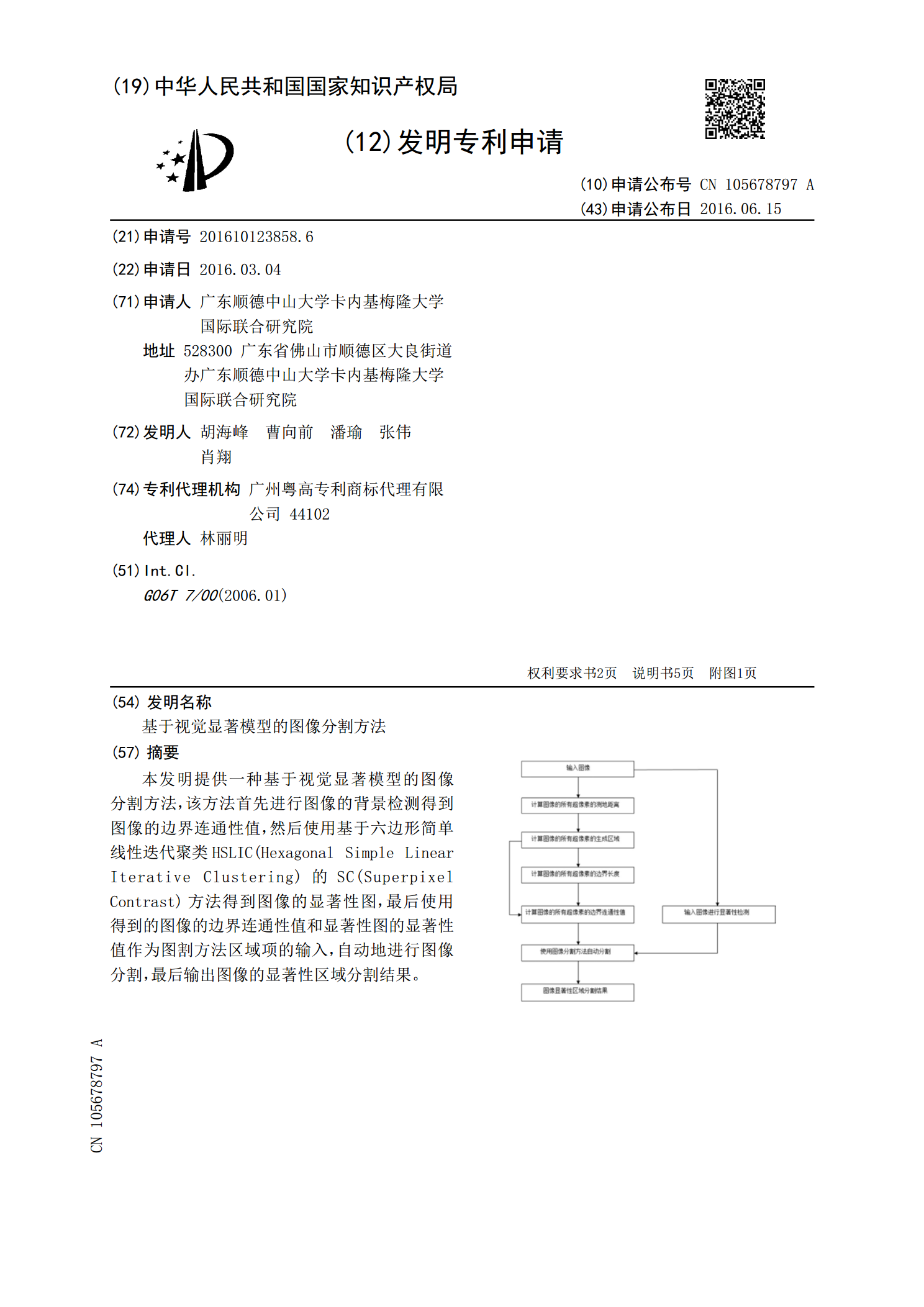
本发明提供一种基于视觉显著模型的图像分割方法,该方法首先进行图像的背景检测得到图像的边界连通性值,然后使用基于六边形简单线性迭代聚类HSLIC(Hexagonal?Simple?Linear?Iterative?Clustering)的SC(Superpixel?Contrast)方法得到图像的显著性图,最后使用得到的图像的边界连通性值和显著性图的显著性值作为图割方法区域项的输入,自动地进行图像分割,最后输出图像的显著性区域分割结果。