
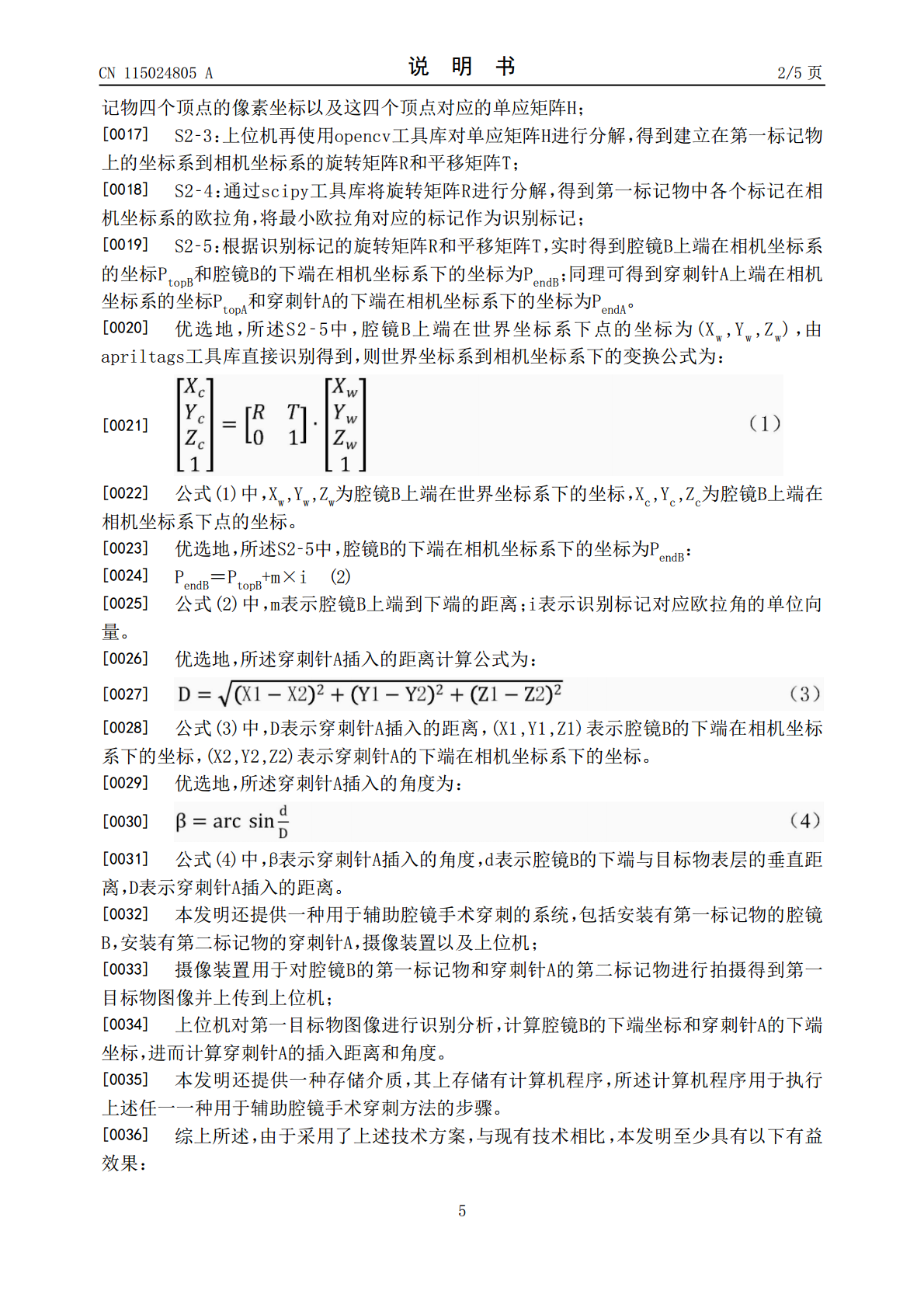
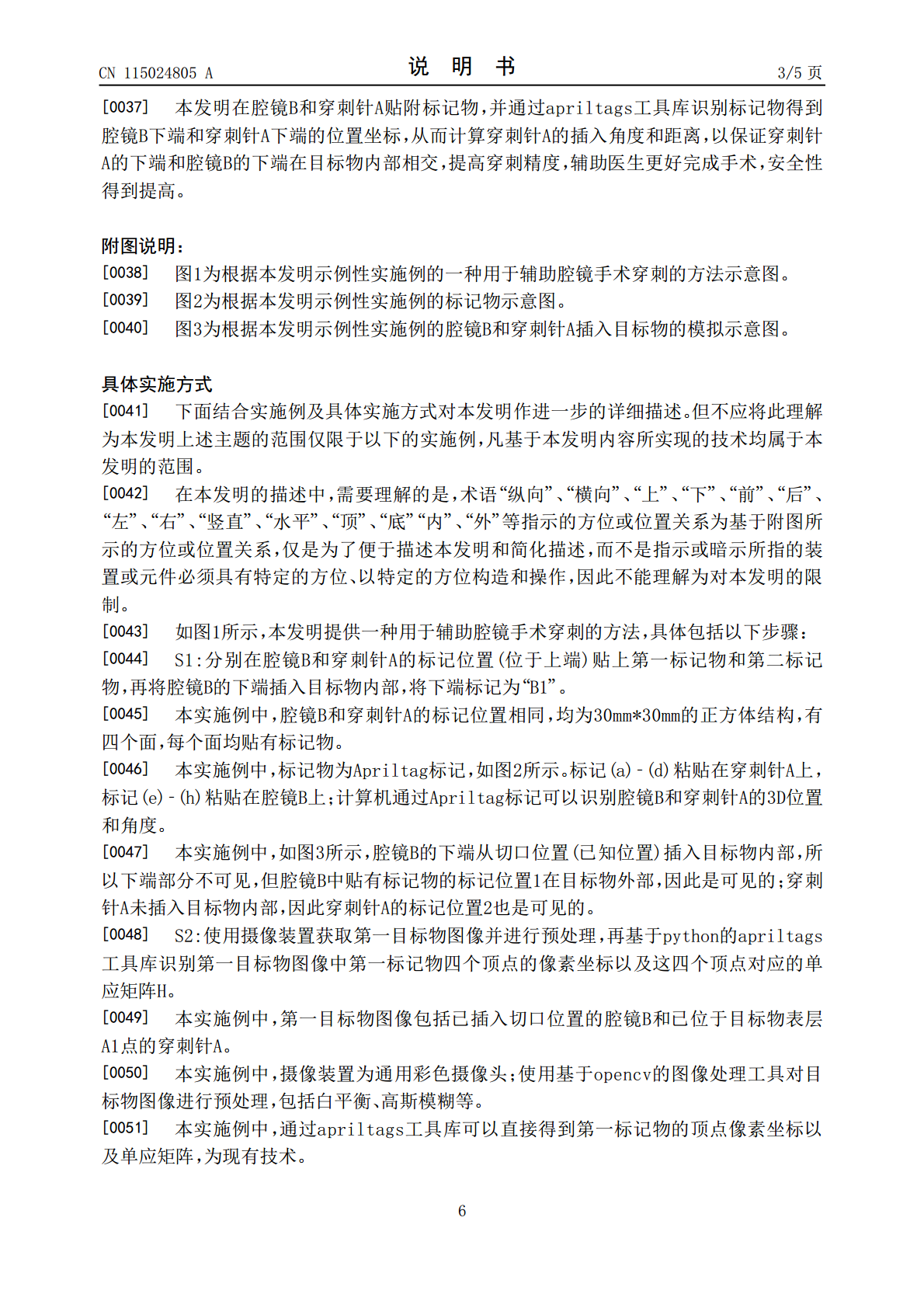
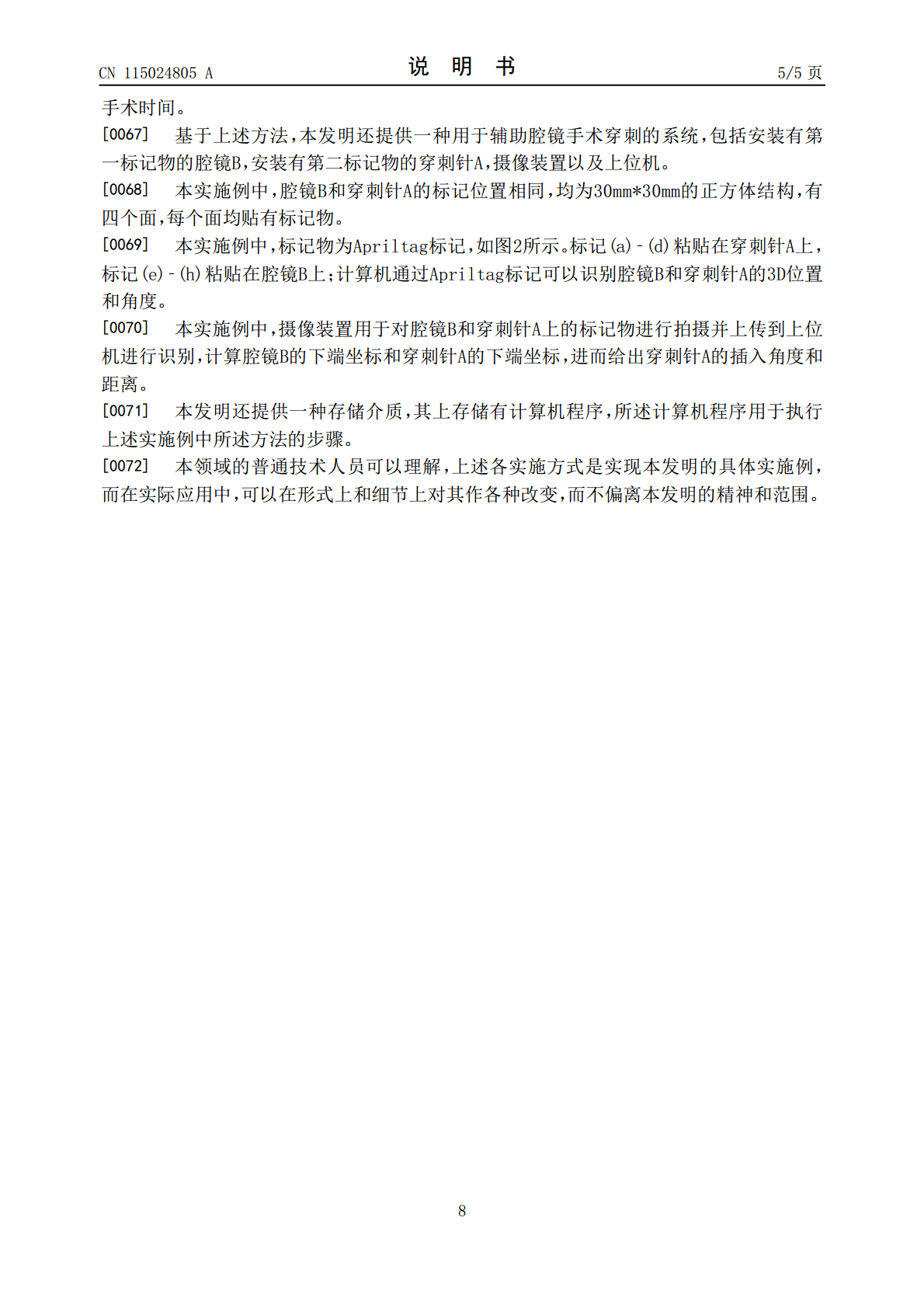
一种用于辅助腔镜手术穿刺的方法、系统和存储介质.pdf

森林****来了


1/10

2/10

3/10

4/10
5/10
6/10

7/10
8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种用于辅助腔镜手术穿刺的方法、系统和存储介质.pdf
本发明公开一种用于辅助腔镜手术穿刺的方法、系统和存储介质,包括S1:分别在腔镜B和穿刺针A的标记位置贴上第一标记物和第二标记物,再将腔镜B的下端插入目标物内部,穿刺针A放置在目标物表层;S2:使用摄像装置对场景进行拍摄得到第一目标物图像并传输到上位机,上位机进对第一目标物图像进行分析,得到腔镜B下端的坐标P

用于腔镜手术的施夹辅助装置.pdf
本发明公开了一种用于腔镜手术的施夹辅助装置,包括钳头组件和操作组件,通过操作组件控制钳头组件的开合,操作组件包括用于夹持定位在预定位置后继续保持夹持并滞留在预定位置的夹持部以及用于当夹持部稳定夹持预定位置后从夹持部上拆除以让出操作空间的操作部,夹持部与操作部之间通过联动构造连接并联动;夹持部上设有用于通过控制而展开以承托组织器官进而辅助显露手术视野的支撑组件;夹持部连接支撑组件并由操作部控制夹持部带动支撑组件运动以实现支撑组件的展开或收拢,或者操作部连接并控制支撑组件展开或收拢,或者支撑组件上设有用于控制
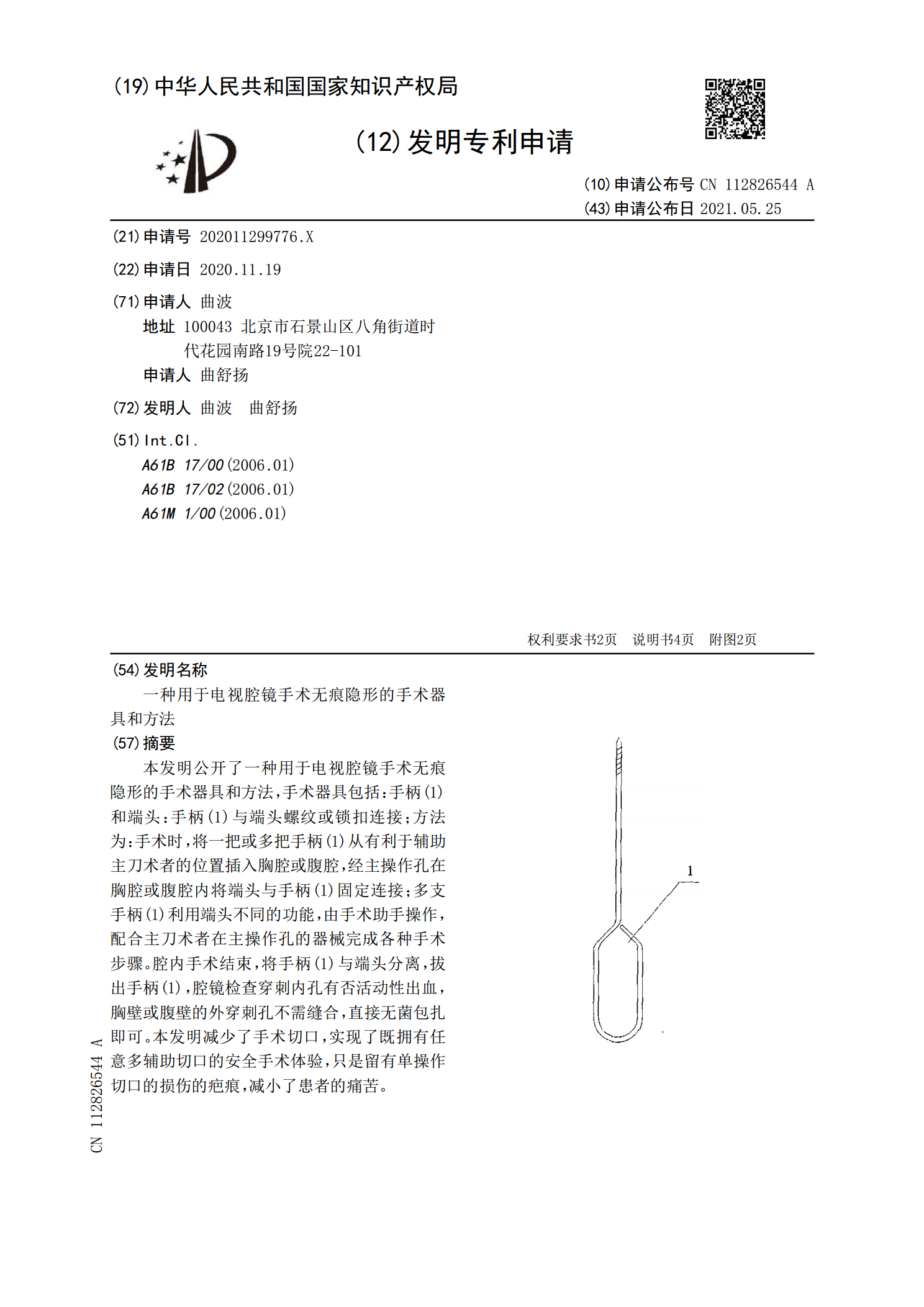
一种用于电视腔镜手术无痕隐形的手术器具和方法.pdf
本发明公开了一种用于电视腔镜手术无痕隐形的手术器具和方法,手术器具包括:手柄(1)和端头:手柄(1)与端头螺纹或锁扣连接;方法为:手术时,将一把或多把手柄(1)从有利于辅助主刀术者的位置插入胸腔或腹腔,经主操作孔在胸腔或腹腔内将端头与手柄(1)固定连接;多支手柄(1)利用端头不同的功能,由手术助手操作,配合主刀术者在主操作孔的器械完成各种手术步骤。腔内手术结束,将手柄(1)与端头分离,拔出手柄(1),腔镜检查穿刺内孔有否活动性出血,胸壁或腹壁的外穿刺孔不需缝合,直接无菌包扎即可。本发明减少了手术切口,实现

一种用于腔镜手术中目标器官的成像及处理方法及系统.pdf
本发明提出了一种用于腔镜手术中目标器官的成像及处理方法及系统,涉及医疗图像处理领域。通过获取目标器官的扫描图像,扫描图像中包括初步定位病灶位置;然后对扫描图像进行显著性区域检测;然后将扫描图像沿显著性区域进行分割,得到显著性区域图像和非显著性区域图像;然后将显著性区域图像采用光线投射算法进行三维重建,生成第一三维图像;然后将非显著性区域图像采用移动立方体算法进行三维重建,生成第二三维图像;最后将第一三维图像和第二三维图像进行组合,得到目标器官三维图像。使整个目标器官的重建运算量减小,提高重建速度。可以显示
基于混合现实技术的手术辅助导航系统、方法和存储介质.pdf
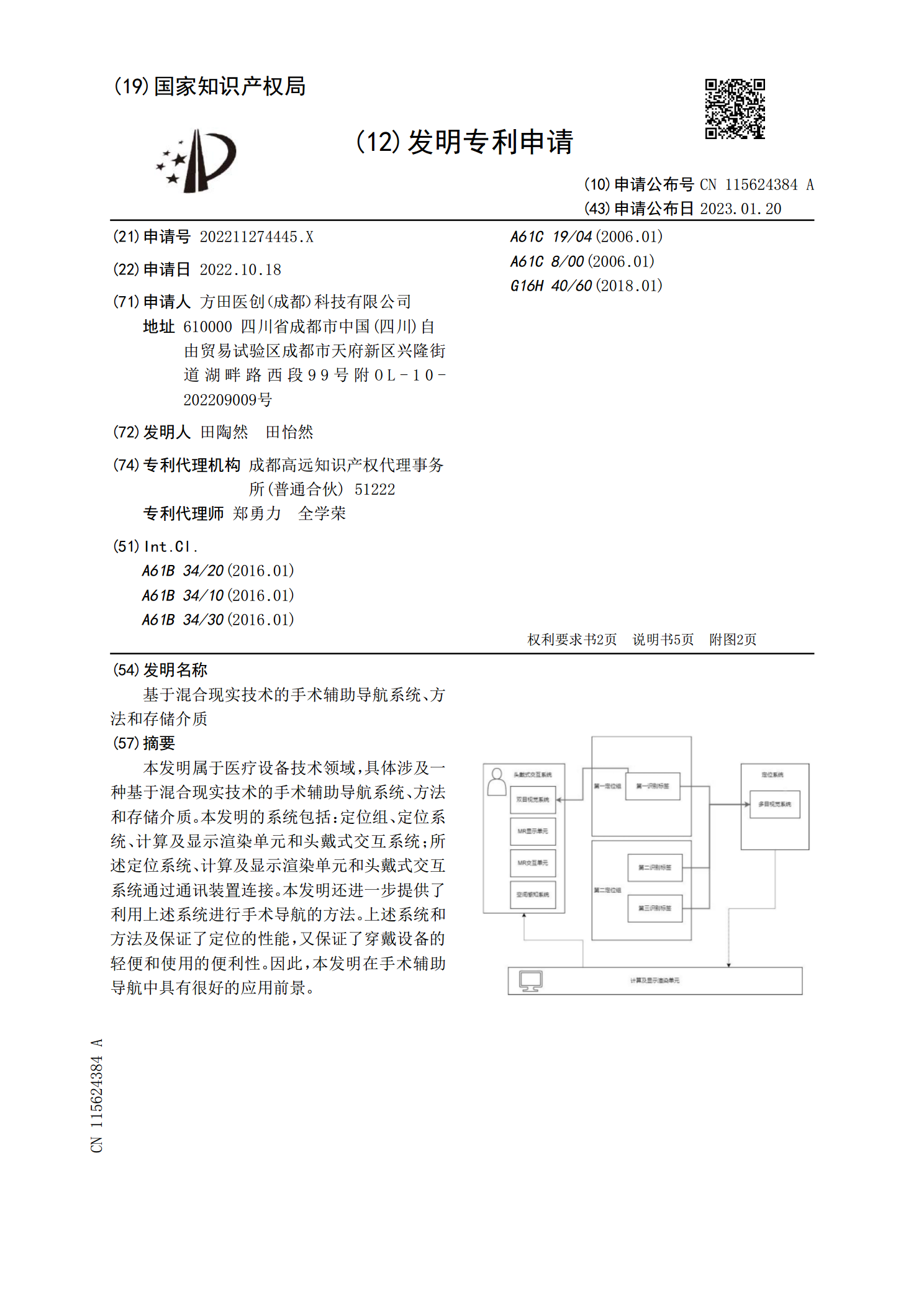
本发明属于医疗设备技术领域,具体涉及一种基于混合现实技术的手术辅助导航系统、方法和存储介质。本发明的系统包括:定位组、定位系统、计算及显示渲染单元和头戴式交互系统;所述定位系统、计算及显示渲染单元和头戴式交互系统通过通讯装置连接。本发明还进一步提供了利用上述系统进行手术导航的方法。上述系统和方法及保证了定位的性能,又保证了穿戴设备的轻便和使用的便利性。因此,本发明在手术辅助导航中具有很好的应用前景。