
一种基于定位蒸馏的YOLOX目标检测模型压缩方法.pdf

努力****元恺

1/10
2/10
3/10

4/10
5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于定位蒸馏的YOLOX目标检测模型压缩方法.pdf
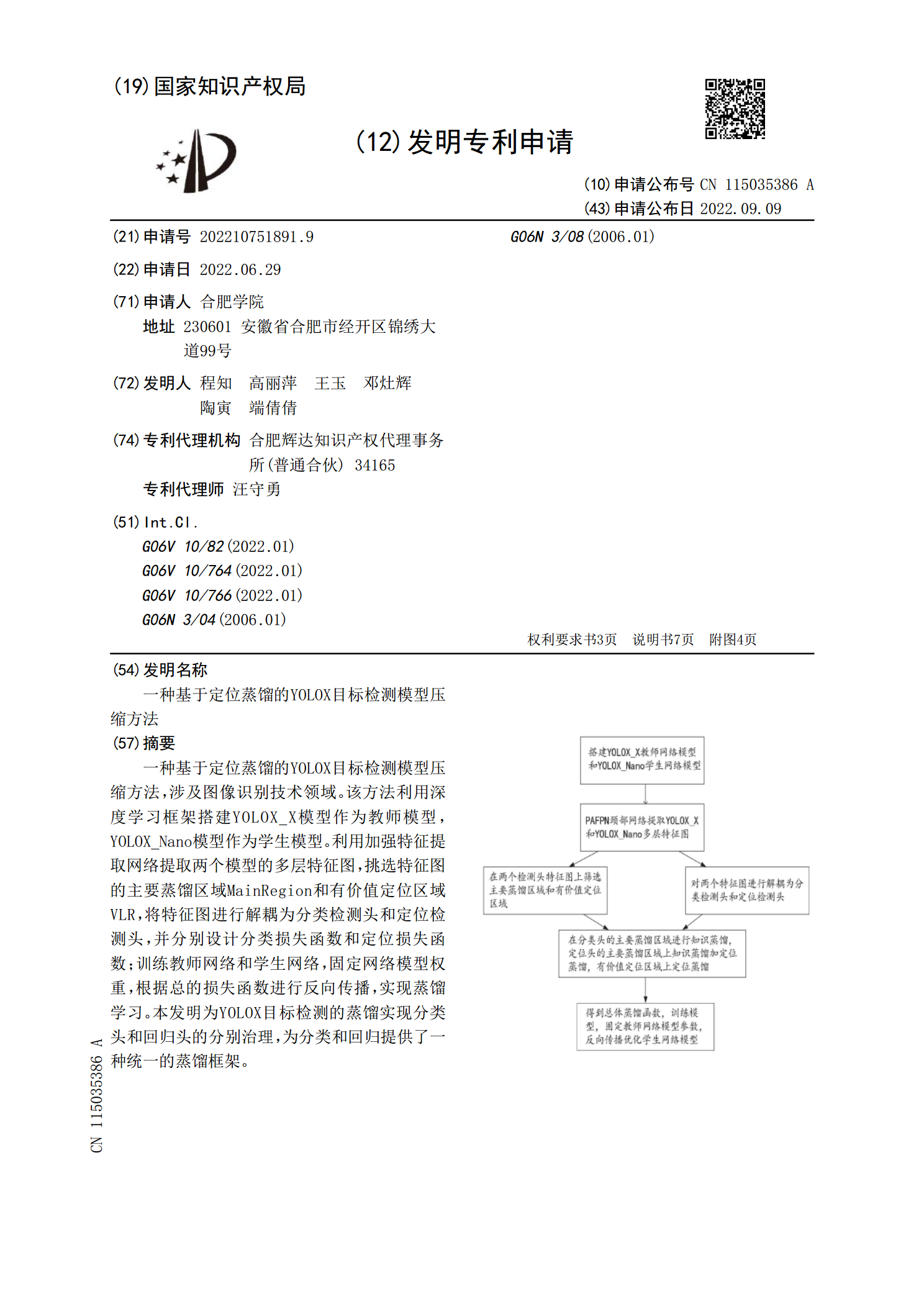
一种基于定位蒸馏的YOLOX目标检测模型压缩方法,涉及图像识别技术领域。该方法利用深度学习框架搭建YOLOX_X模型作为教师模型,YOLOX_Nano模型作为学生模型。利用加强特征提取网络提取两个模型的多层特征图,挑选特征图的主要蒸馏区域MainRegion和有价值定位区域VLR,将特征图进行解耦为分类检测头和定位检测头,并分别设计分类损失函数和定位损失函数;训练教师网络和学生网络,固定网络模型权重,根据总的损失函数进行反向传播,实现蒸馏学习。本发明为YOLOX目标检测的蒸馏实现分类头和回归头的分别治理,
基于改进YOLOX模型的小目标检测方法.pdf
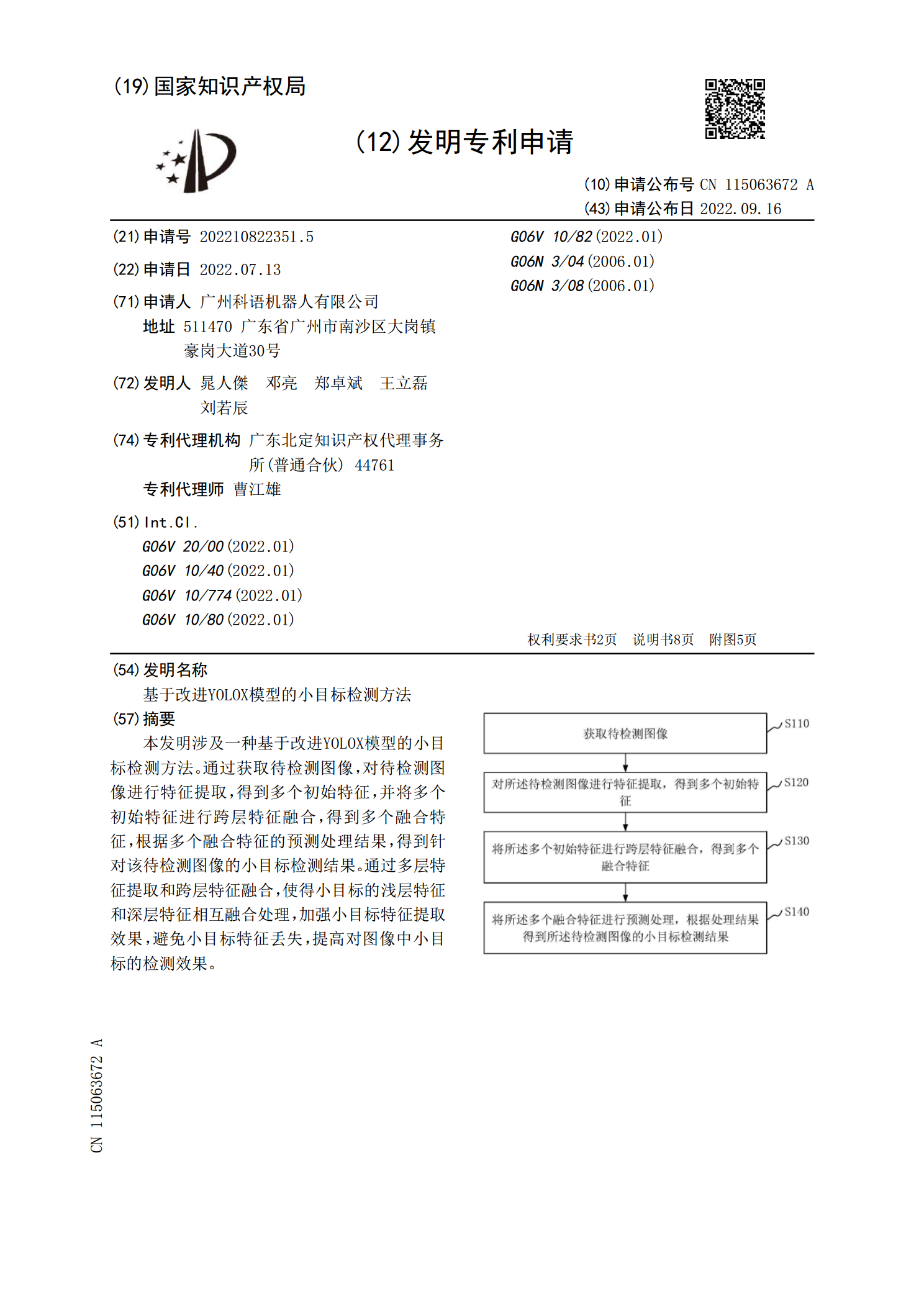
本发明涉及一种基于改进YOLOX模型的小目标检测方法。通过获取待检测图像,对待检测图像进行特征提取,得到多个初始特征,并将多个初始特征进行跨层特征融合,得到多个融合特征,根据多个融合特征的预测处理结果,得到针对该待检测图像的小目标检测结果。通过多层特征提取和跨层特征融合,使得小目标的浅层特征和深层特征相互融合处理,加强小目标特征提取效果,避免小目标特征丢失,提高对图像中小目标的检测效果。
一种基于知识蒸馏的目标检测压缩方法.pdf
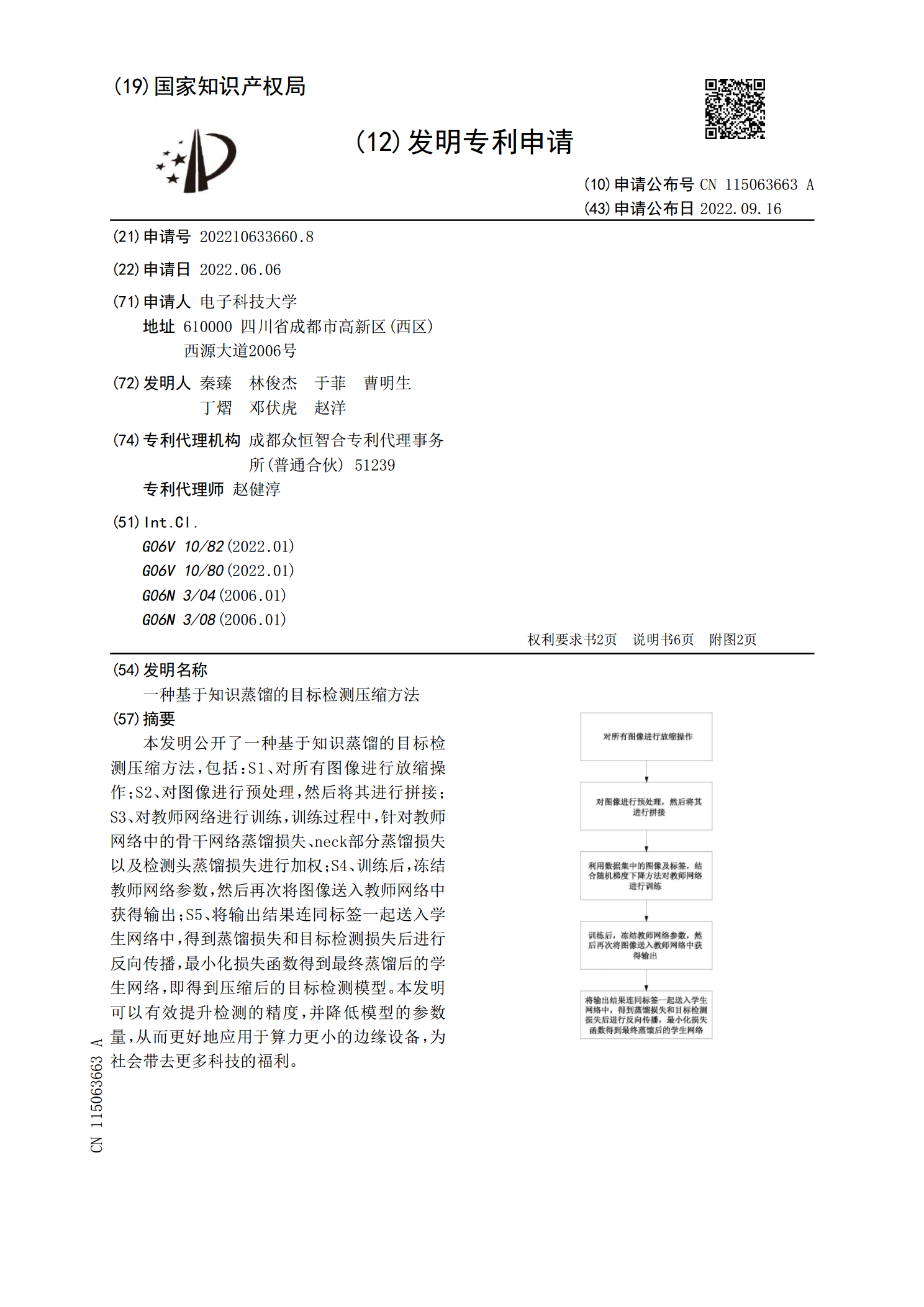
本发明公开了一种基于知识蒸馏的目标检测压缩方法,包括:S1、对所有图像进行放缩操作;S2、对图像进行预处理,然后将其进行拼接;S3、对教师网络进行训练,训练过程中,针对教师网络中的骨干网络蒸馏损失、neck部分蒸馏损失以及检测头蒸馏损失进行加权;S4、训练后,冻结教师网络参数,然后再次将图像送入教师网络中获得输出;S5、将输出结果连同标签一起送入学生网络中,得到蒸馏损失和目标检测损失后进行反向传播,最小化损失函数得到最终蒸馏后的学生网络,即得到压缩后的目标检测模型。本发明可以有效提升检测的精度,并降低模型
基于YOLOX的旋转目标检测方法.pdf
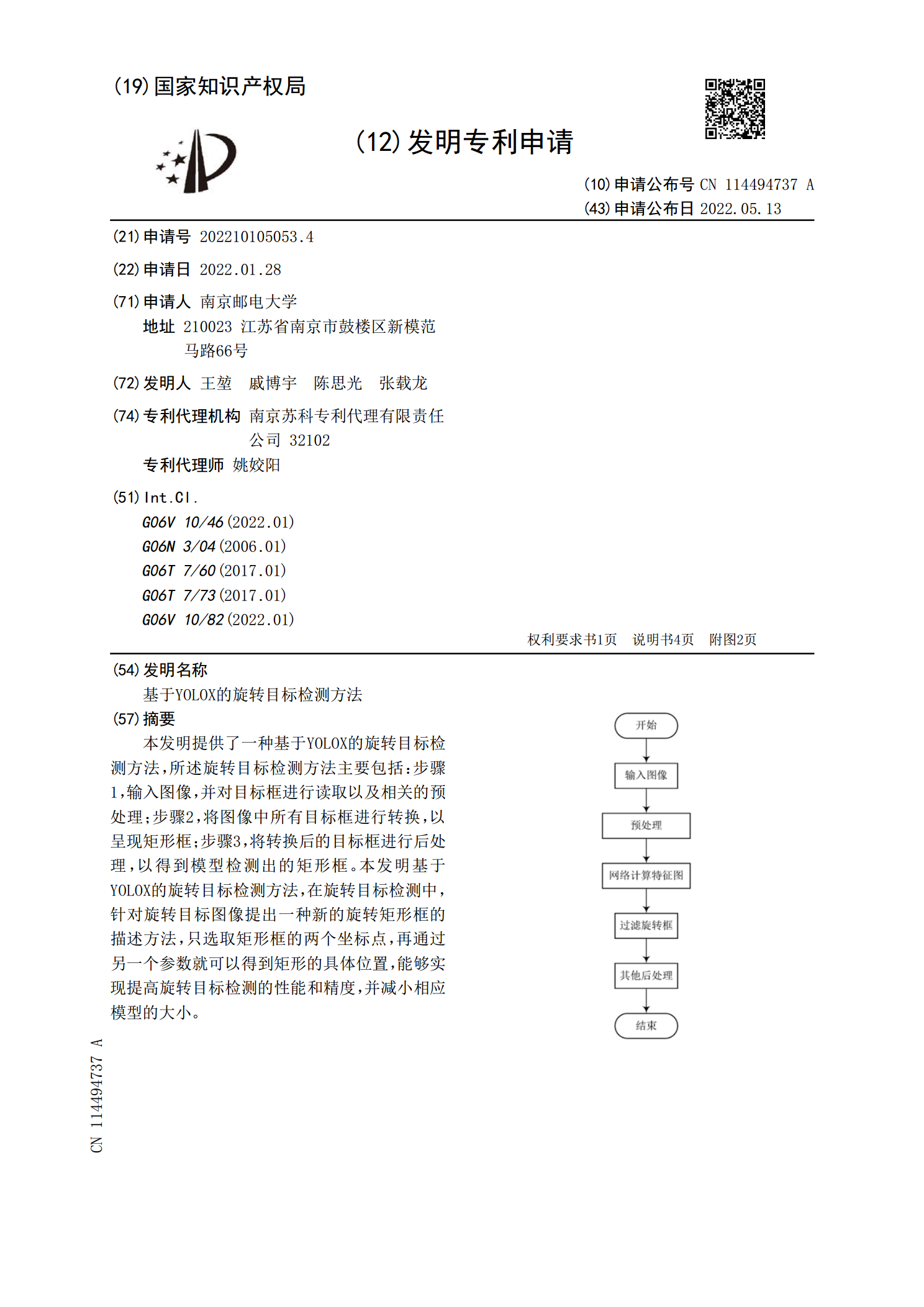
本发明提供了一种基于YOLOX的旋转目标检测方法,所述旋转目标检测方法主要包括:步骤1,输入图像,并对目标框进行读取以及相关的预处理;步骤2,将图像中所有目标框进行转换,以呈现矩形框;步骤3,将转换后的目标框进行后处理,以得到模型检测出的矩形框。本发明基于YOLOX的旋转目标检测方法,在旋转目标检测中,针对旋转目标图像提出一种新的旋转矩形框的描述方法,只选取矩形框的两个坐标点,再通过另一个参数就可以得到矩形的具体位置,能够实现提高旋转目标检测的性能和精度,并减小相应模型的大小。
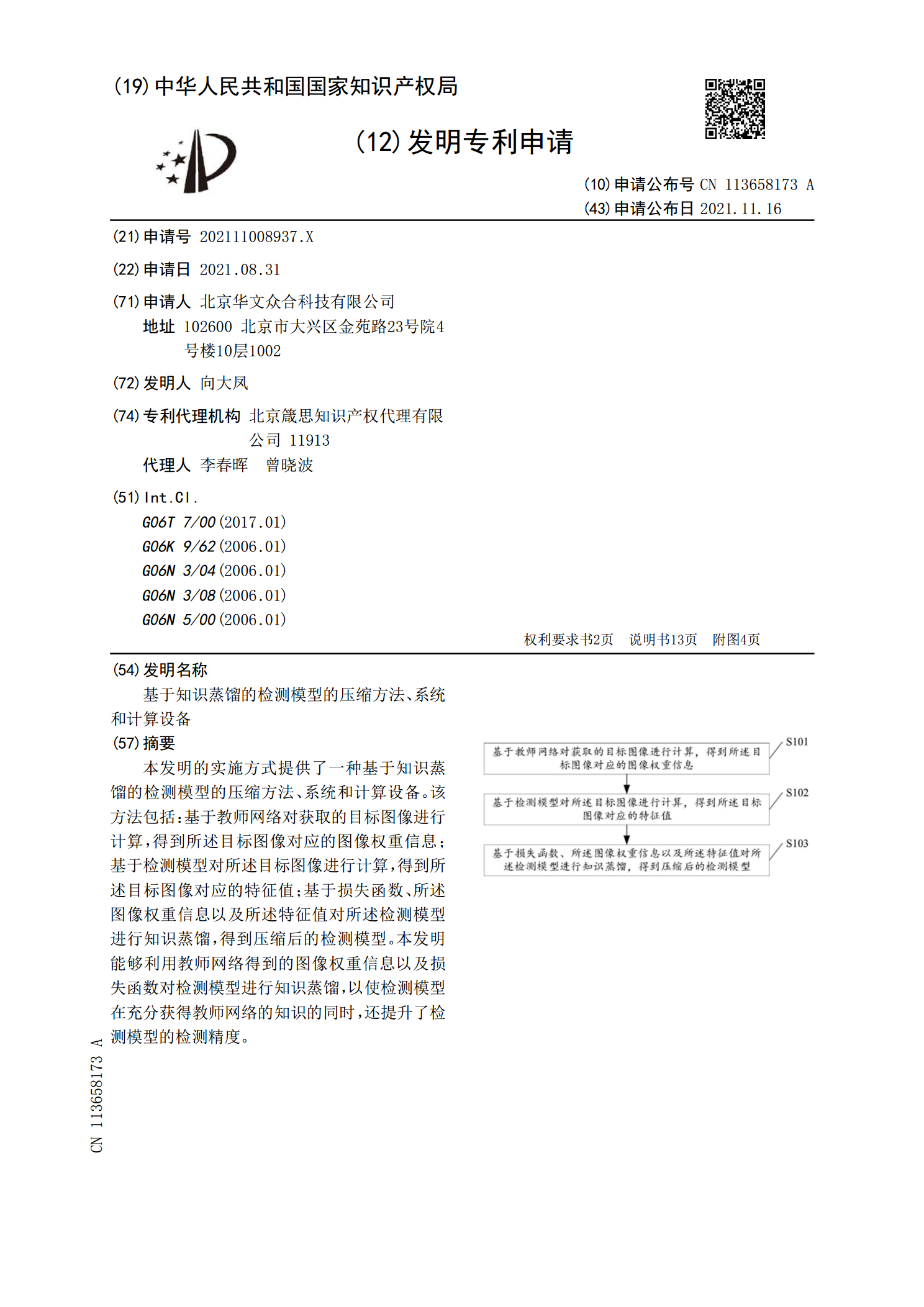
基于知识蒸馏的检测模型的压缩方法、系统和计算设备.pdf
本发明的实施方式提供了一种基于知识蒸馏的检测模型的压缩方法、系统和计算设备。该方法包括:基于教师网络对获取的目标图像进行计算,得到所述目标图像对应的图像权重信息;基于检测模型对所述目标图像进行计算,得到所述目标图像对应的特征值;基于损失函数、所述图像权重信息以及所述特征值对所述检测模型进行知识蒸馏,得到压缩后的检测模型。本发明能够利用教师网络得到的图像权重信息以及损失函数对检测模型进行知识蒸馏,以使检测模型在充分获得教师网络的知识的同时,还提升了检测模型的检测精度。