
三维成像方法及装置.pdf

是你****枝呀


1/10

2/10

3/10
4/10

5/10

6/10

7/10
8/10

9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
三维成像方法及装置.pdf
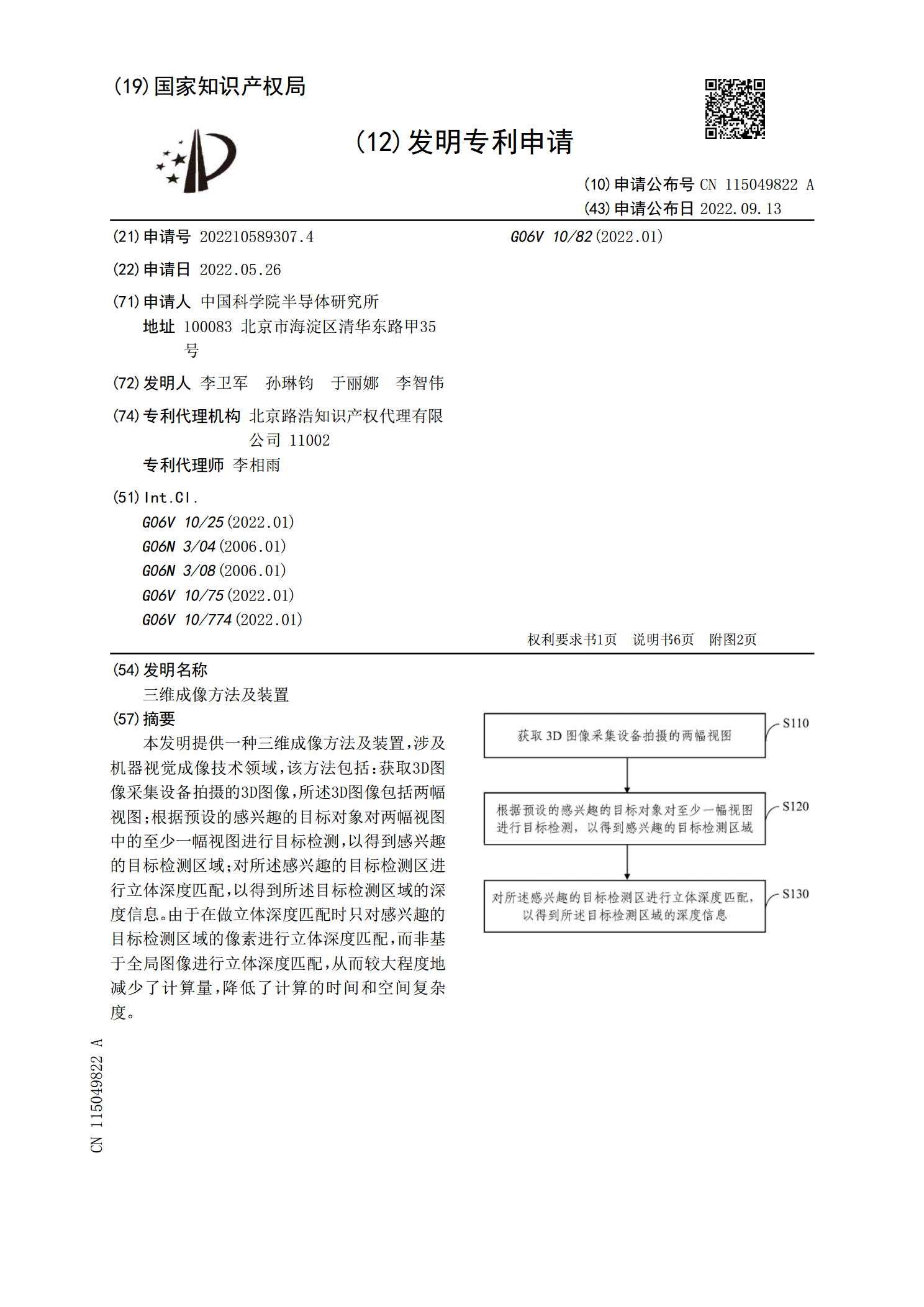
本发明提供一种三维成像方法及装置,涉及机器视觉成像技术领域,该方法包括:获取3D图像采集设备拍摄的3D图像,所述3D图像包括两幅视图;根据预设的感兴趣的目标对象对两幅视图中的至少一幅视图进行目标检测,以得到感兴趣的目标检测区域;对所述感兴趣的目标检测区进行立体深度匹配,以得到所述目标检测区域的深度信息。由于在做立体深度匹配时只对感兴趣的目标检测区域的像素进行立体深度匹配,而非基于全局图像进行立体深度匹配,从而较大程度地减少了计算量,降低了计算的时间和空间复杂度。

超声三维成像方法和装置.pdf
本申请提供了一种超声三维成像方法和装置,该方法通过控制超声探头向目标组织发射至少一组体发散波;接收从目标组织返回的超声回波,获得至少三组超声回波信号;对至少三组超声回波信号进行信号处理,得到与至少三个不同的发射角度或者至少三个不同的接收角度对应的至少三个不同方向的速度分量;对至少三个不同方向的速度分量进行矢量合成,得到目标组织的三维向量速度。本申请采用预设排列组合的阵元向目标组织发射体发散波,体发散波的扫描区域大,得到的图像覆盖范围大,帧率也较高,且采用体发散波也可以同时完成不同的线或面的扫描,避免在测量
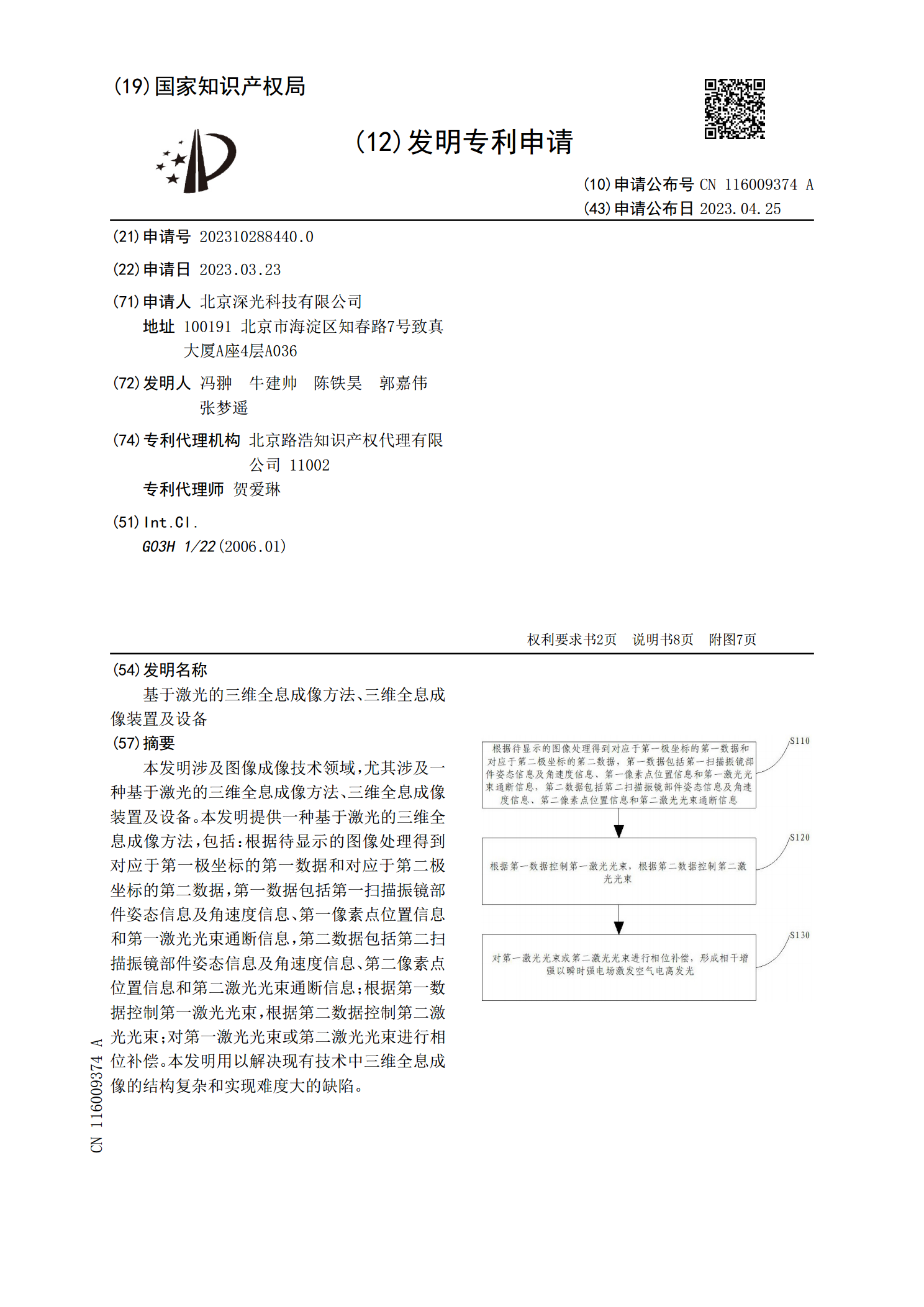
基于激光的三维全息成像方法、三维全息成像装置及设备.pdf
本发明涉及图像成像技术领域,尤其涉及一种基于激光的三维全息成像方法、三维全息成像装置及设备。本发明提供一种基于激光的三维全息成像方法,包括:根据待显示的图像处理得到对应于第一极坐标的第一数据和对应于第二极坐标的第二数据,第一数据包括第一扫描振镜部件姿态信息及角速度信息、第一像素点位置信息和第一激光光束通断信息,第二数据包括第二扫描振镜部件姿态信息及角速度信息、第二像素点位置信息和第二激光光束通断信息;根据第一数据控制第一激光光束,根据第二数据控制第二激光光束;对第一激光光束或第二激光光束进行相位补偿。本发

三维成像方法及三维成像终端.pdf
本发明提出了一种三维成像方法及三维成像终端,其中,三维成像终端包括位于同一侧面的第一摄像头和第二摄像头,三维成像方法用于三维成像终端,包括:在接收到拍照指令时,控制第一摄像头针对拍摄对象拍摄第一图片;从第一摄像头完成拍摄瞬间开始计时;在达到预设时长后控制第二摄像头针对拍摄对象拍摄第二图片,第二摄像头拍摄时的聚焦点与第一摄像头相同;合成第一图片和第二图片;渲染第一图片和第二图片;显示经过合成和渲染后得到的三维图片。本发明提供的三维成像方法,可通过双摄时差拍摄合成三维立体图片,为消费者提供更好的用户体验。通过
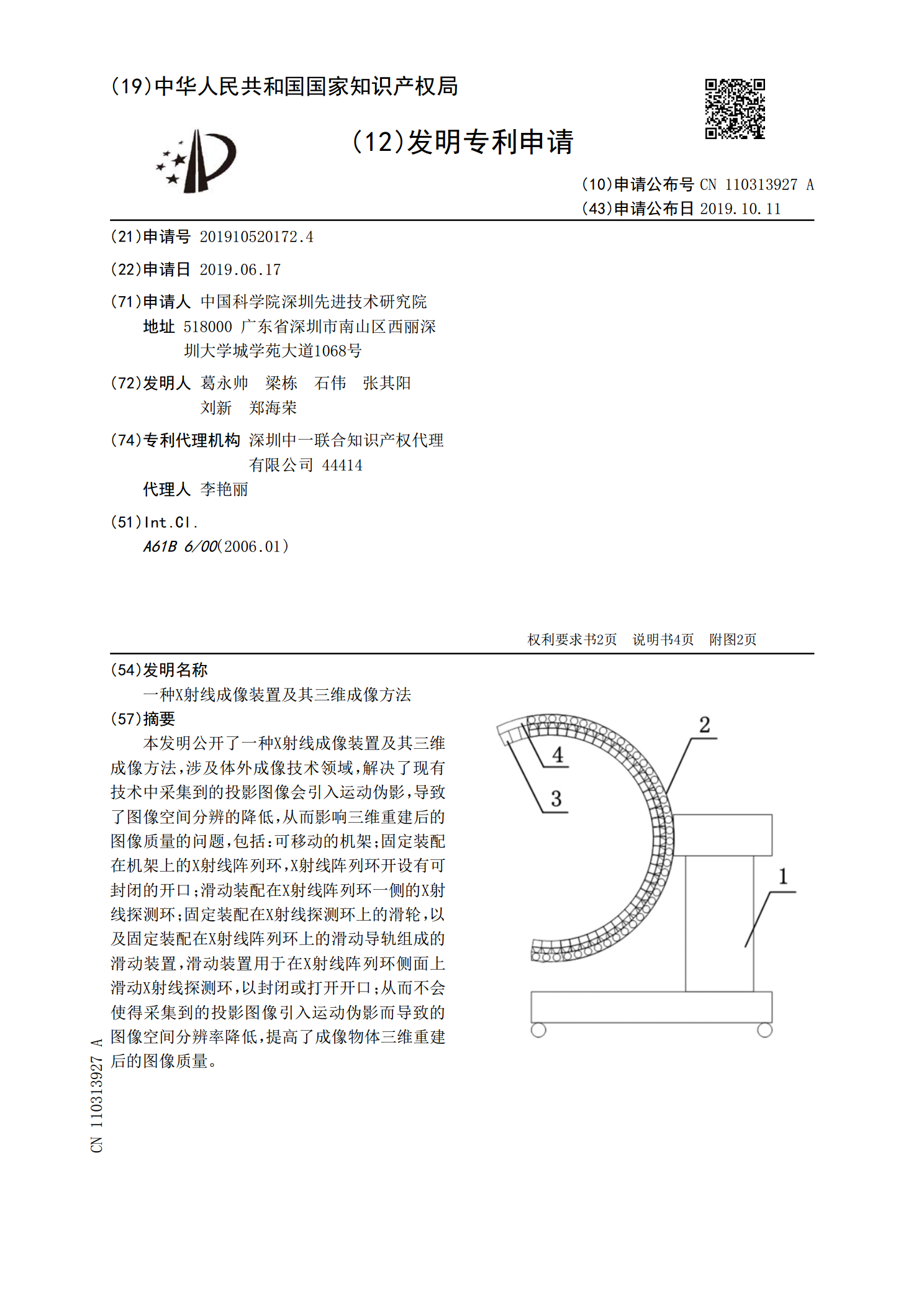
一种X射线成像装置及其三维成像方法.pdf
本发明公开了一种X射线成像装置及其三维成像方法,涉及体外成像技术领域,解决了现有技术中采集到的投影图像会引入运动伪影,导致了图像空间分辨的降低,从而影响三维重建后的图像质量的问题,包括:可移动的机架;固定装配在机架上的X射线阵列环,X射线阵列环开设有可封闭的开口;滑动装配在X射线阵列环一侧的X射线探测环;固定装配在X射线探测环上的滑轮,以及固定装配在X射线阵列环上的滑动导轨组成的滑动装置,滑动装置用于在X射线阵列环侧面上滑动X射线探测环,以封闭或打开开口;从而不会使得采集到的投影图像引入运动伪影而导致的图