
算法模型的确定方法、装置、电子设备及存储介质.pdf

书生****35

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

算法模型的确定方法、装置、电子设备及存储介质.pdf
本发明提供一种算法模型的确定方法、装置、电子设备及存储介质,属于人工智能领域。所述方法包括:确定目标线路上的人流移动方向;基于所述目标线路上设置的各摄像设备所对应的可视域方向以及所述人流移动方向,确定各所述摄像设备分别对应的、用于进行检测的目标算法模型;所述算法模型包括人脸检测模型或人体检测模型。本发明可以通过确定各摄像设备分别对应的人脸检测模型或人体检测模型实现释放空余算力资源的目的,可以利用释放的空余算力资源进行继续优化。
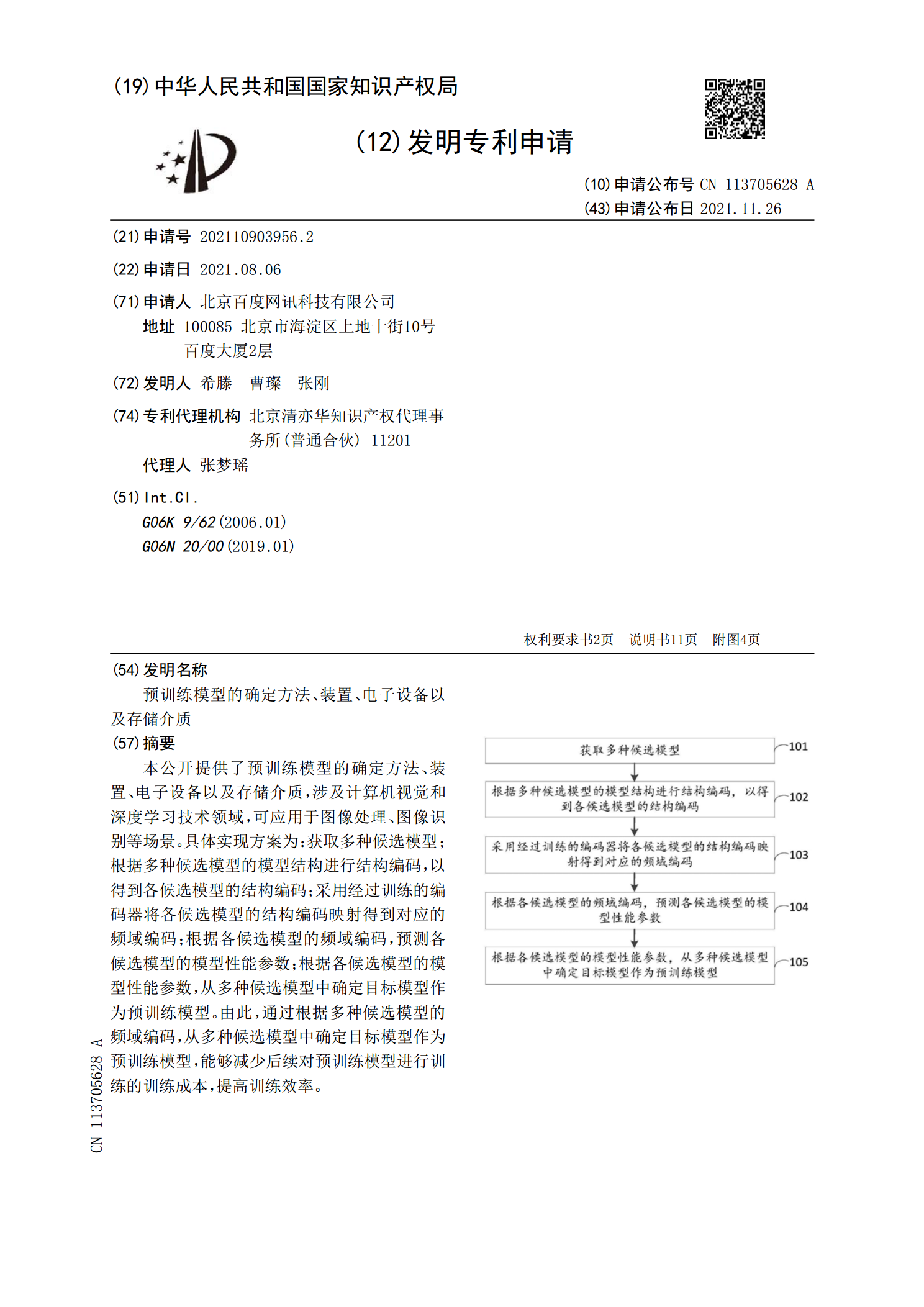
预训练模型的确定方法、装置、电子设备以及存储介质.pdf
本公开提供了预训练模型的确定方法、装置、电子设备以及存储介质,涉及计算机视觉和深度学习技术领域,可应用于图像处理、图像识别等场景。具体实现方案为:获取多种候选模型;根据多种候选模型的模型结构进行结构编码,以得到各候选模型的结构编码;采用经过训练的编码器将各候选模型的结构编码映射得到对应的频域编码;根据各候选模型的频域编码,预测各候选模型的模型性能参数;根据各候选模型的模型性能参数,从多种候选模型中确定目标模型作为预训练模型。由此,通过根据多种候选模型的频域编码,从多种候选模型中确定目标模型作为预训练模型,
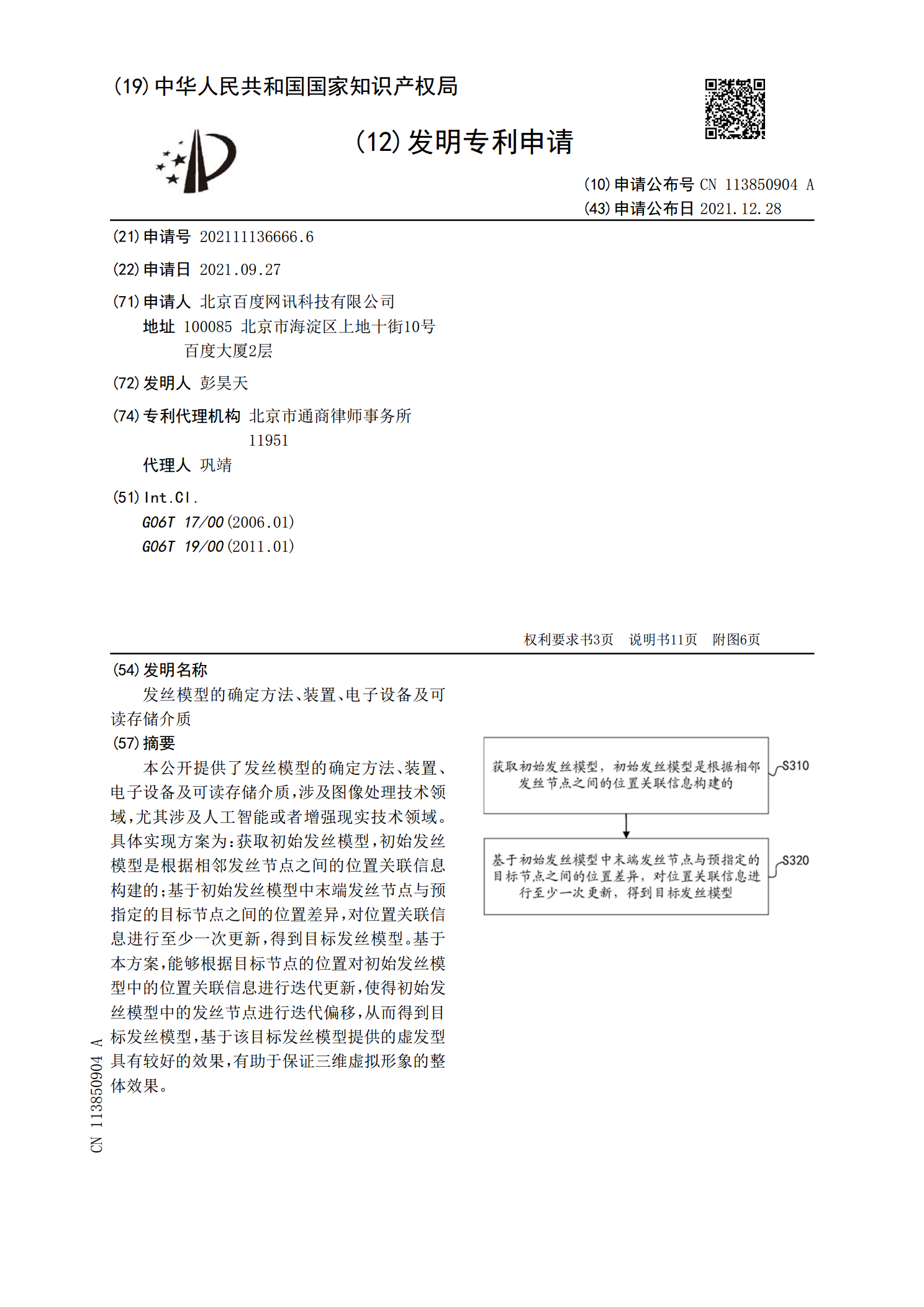
发丝模型的确定方法、装置、电子设备及可读存储介质.pdf
本公开提供了发丝模型的确定方法、装置、电子设备及可读存储介质,涉及图像处理技术领域,尤其涉及人工智能或者增强现实技术领域。具体实现方案为:获取初始发丝模型,初始发丝模型是根据相邻发丝节点之间的位置关联信息构建的;基于初始发丝模型中末端发丝节点与预指定的目标节点之间的位置差异,对位置关联信息进行至少一次更新,得到目标发丝模型。基于本方案,能够根据目标节点的位置对初始发丝模型中的位置关联信息进行迭代更新,使得初始发丝模型中的发丝节点进行迭代偏移,从而得到目标发丝模型,基于该目标发丝模型提供的虚发型具有较好的效

一种模型得分确定方法、装置、电子设备及存储介质.pdf
本申请提供了一种模型得分确定方法、装置、电子设备及存储介质,涉及模型评价技术领域。首先获取目标图像,其中,目标图像携带有经纬度信息,然后利用目标模型从图像数据库中确定与目标图像相似度匹配最高的K张卫星图像并排序,其中,每张卫星图像均携带有经纬度信息且K>1,最后依据预设公式及匹配出的每张卫星图像与目标图像之间的欧式距离确定目标模型的得分。本申请提供的模型得分确定方法、装置、电子设备及存储介质具有能够将模型的定位性能数值化的优点。
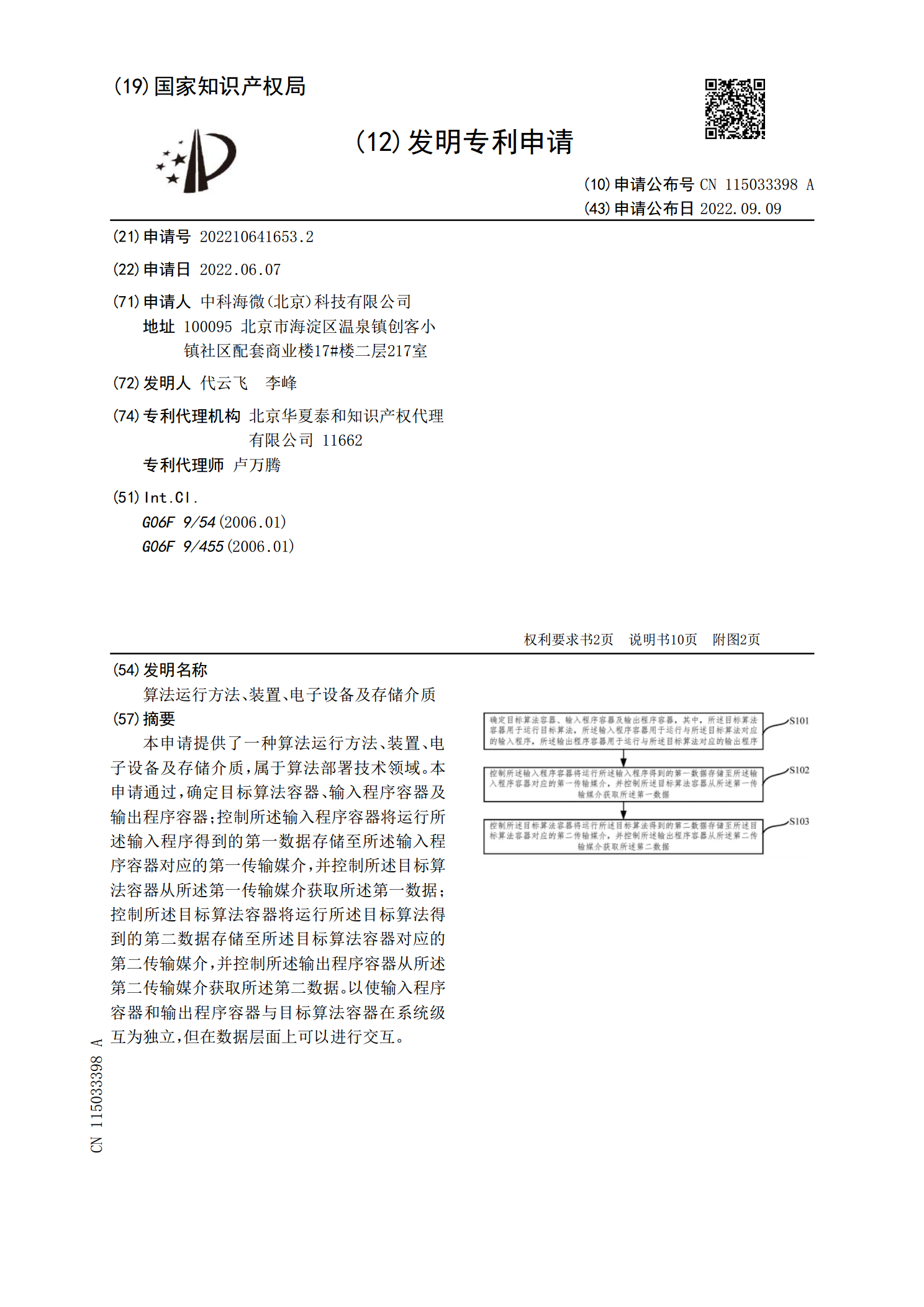
算法运行方法、装置、电子设备及存储介质.pdf
本申请提供了一种算法运行方法、装置、电子设备及存储介质,属于算法部署技术领域。本申请通过,确定目标算法容器、输入程序容器及输出程序容器;控制所述输入程序容器将运行所述输入程序得到的第一数据存储至所述输入程序容器对应的第一传输媒介,并控制所述目标算法容器从所述第一传输媒介获取所述第一数据;控制所述目标算法容器将运行所述目标算法得到的第二数据存储至所述目标算法容器对应的第二传输媒介,并控制所述输出程序容器从所述第二传输媒介获取所述第二数据。以使输入程序容器和输出程序容器与目标算法容器在系统级互为独立,但在数据