
基于多通道表面肌电信号的连续手势动作识别方法.pdf

努力****爱静


1/10

2/10
3/10
4/10
5/10
6/10

7/10

8/10
9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于多通道表面肌电信号的连续手势动作识别方法.pdf
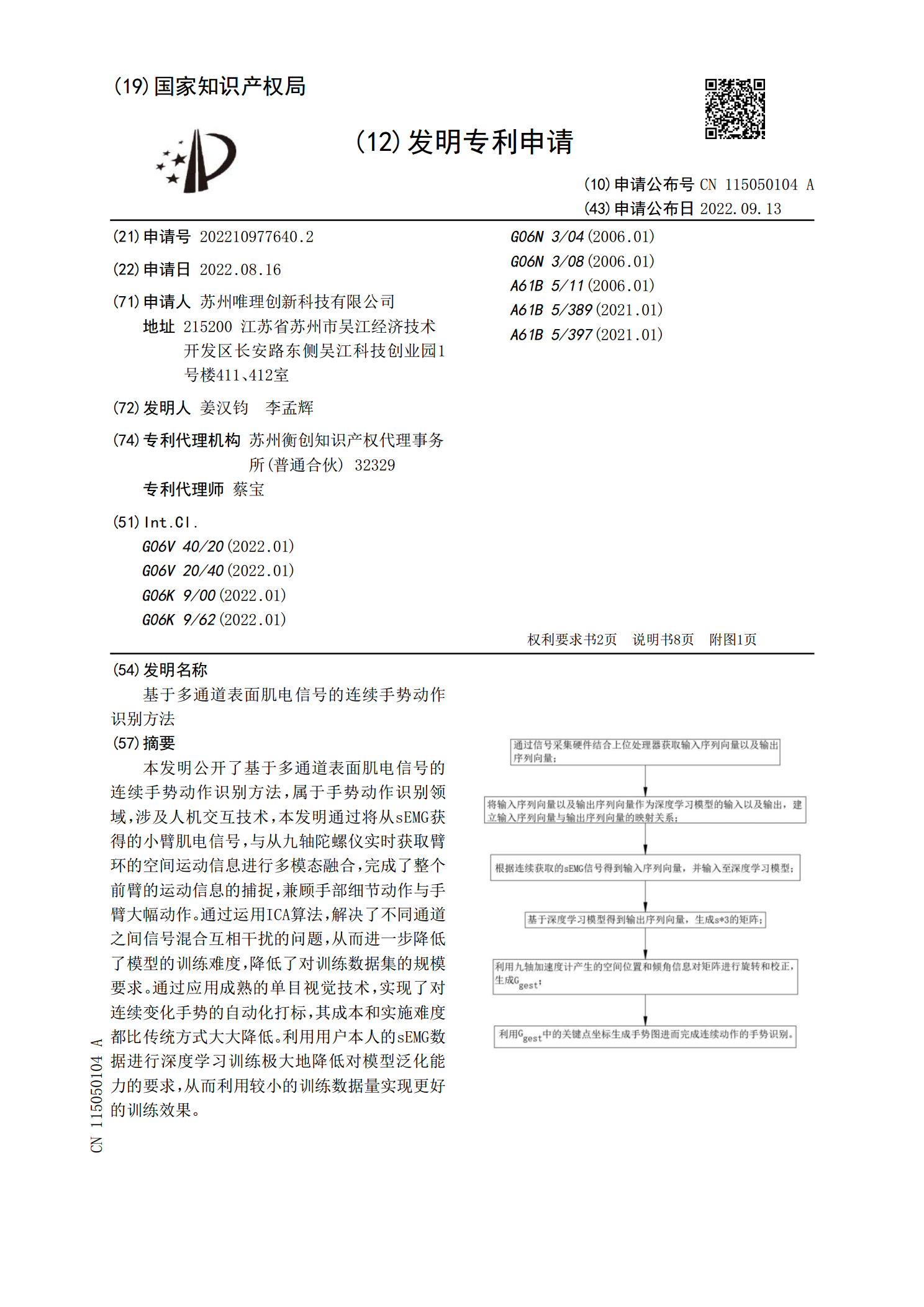
本发明公开了基于多通道表面肌电信号的连续手势动作识别方法,属于手势动作识别领域,涉及人机交互技术,本发明通过将从sEMG获得的小臂肌电信号,与从九轴陀螺仪实时获取臂环的空间运动信息进行多模态融合,完成了整个前臂的运动信息的捕捉,兼顾手部细节动作与手臂大幅动作。通过运用ICA算法,解决了不同通道之间信号混合互相干扰的问题,从而进一步降低了模型的训练难度,降低了对训练数据集的规模要求。通过应用成熟的单目视觉技术,实现了对连续变化手势的自动化打标,其成本和实施难度都比传统方式大大降低。利用用户本人的sEMG数据

基于多通道表面肌电信号的手势识别方法研究.docx
基于多通道表面肌电信号的手势识别方法研究摘要:手势识别是人机交互中的重要问题之一。在本文中,我们提出了一种基于多通道表面肌电信号的手势识别方法。该方法可以通过采集肌肉表面电信号,识别用户手势,从而实现对机器的控制。该方法采用了多通道信号的特征提取方法,以提高分类器的准确率。同时,我们使用了多种分类器进行实验,针对实验结果进行分析和对比,找到了最适合该方法的分类器,从而提高了手势识别的准确度。关键词:手势识别,表面肌电信号,多通道信号,特征提取,分类器Abstract:Gesturerecognitioni

基于表面肌电信号的手势识别方法、系统及设备.pdf
本发明提供一种基于表面肌电信号的手势识别方法、系统及设备,方法包括:在服务器中初始化模型,建立联合模型;客户端采集本地数据;服务器向客户端广播联合模型;客户端使用其本地数据在客户端训练联合模型,形成客户端模型;将客户端模型的参数矩阵上传服务器;服务器基于参数矩阵获得新联合模型的参数矩阵;达到预设的更新轮次后,得到最终联合模型。本方案在数据稀缺的情况下能有效减少跨域带来的影响,将多个拥有小型数据集的客户端结合,在保护数据隐私的前提下训练具有较强泛化能力的联合模型,当遇到新数据时,通过在联合模型上进行参数微调

基于表面肌电信号的手势动作识别技术的应用研究.docx
基于表面肌电信号的手势动作识别技术的应用研究基于表面肌电信号的手势动作识别技术的应用研究摘要:近年来,随着智能设备的普及和人机交互的需求增加,手势动作识别技术逐渐成为研究热点。手势动作识别可以通过分析和识别人体肌肉运动过程中产生的表面肌电信号,实现对手势动作的识别与理解。本文旨在探讨基于表面肌电信号的手势动作识别技术,重点研究其在人机交互、运动康复和虚拟现实等领域的应用,并介绍了目前主流的相关算法和系统。1.引言随着智能设备的快速普及,人机交互方式也在不断演进。传统的键盘鼠标交互方式已经无法满足用户多样化

基于多通道表面肌电特征图像的手势识别研究.docx
基于多通道表面肌电特征图像的手势识别研究标题:基于多通道表面肌电特征图像的手势识别研究摘要:手势识别是现代人机交互界面中一种重要的技术,它允许用户通过手部姿势来进行各种交互操作。与传统的手势识别方法相比,使用多通道表面肌电(sEMG)技术进行手势识别可以提供更精确和可靠的结果。本论文旨在研究基于多通道表面肌电特征图像的手势识别方法,包括信号获取、特征提取和分类算法,并对其性能进行评估。实验结果表明,该方法可以实现高准确率和实时性的手势识别。第一节:引言1.1研究背景1.2研究目的第二节:多通道表面肌电技术