
一种电梯起动的力矩补偿控制方法.pdf

高格****gu


1/9

2/9

3/9

4/9

5/9

6/9
7/9

8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种电梯起动的力矩补偿控制方法.pdf
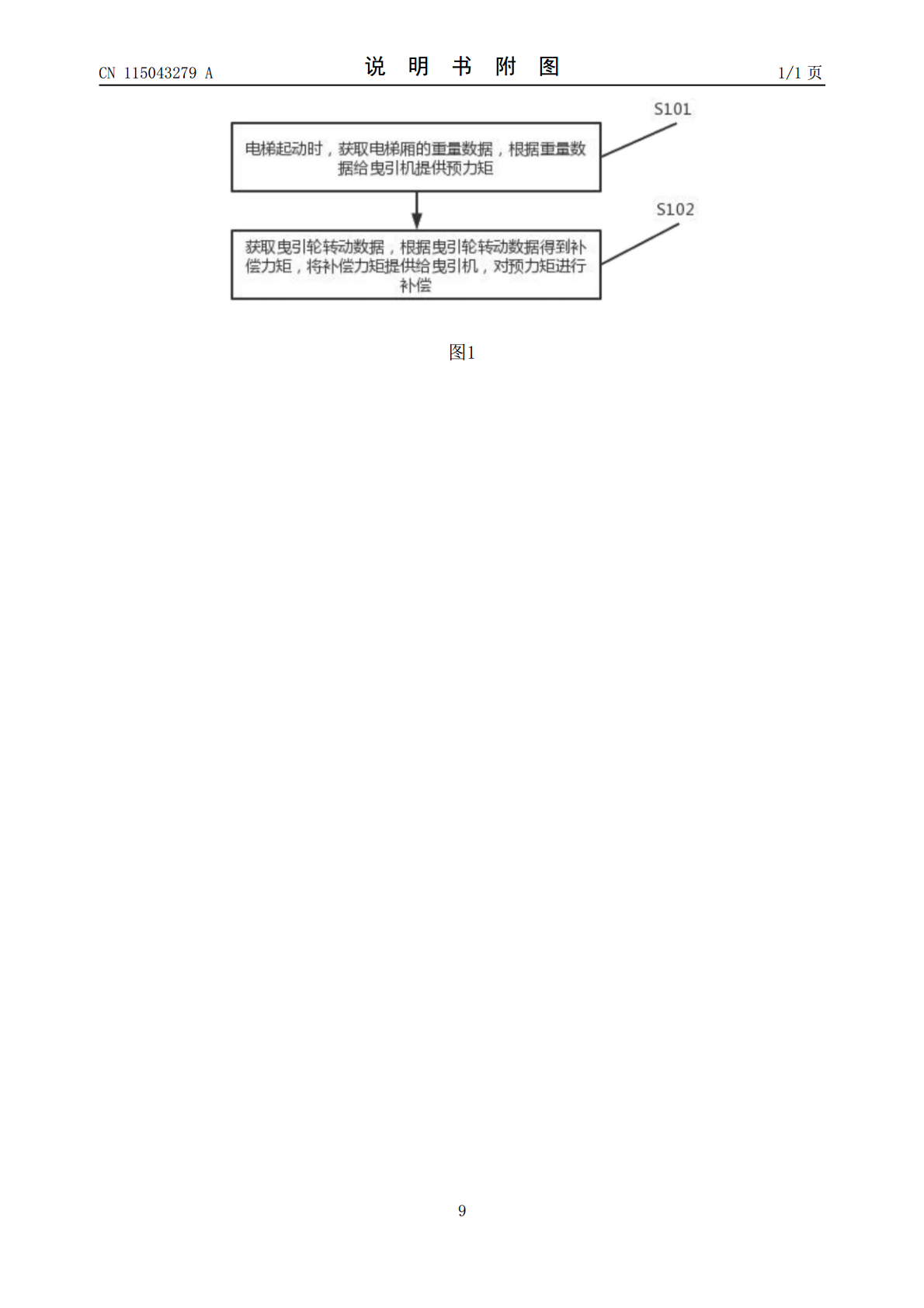
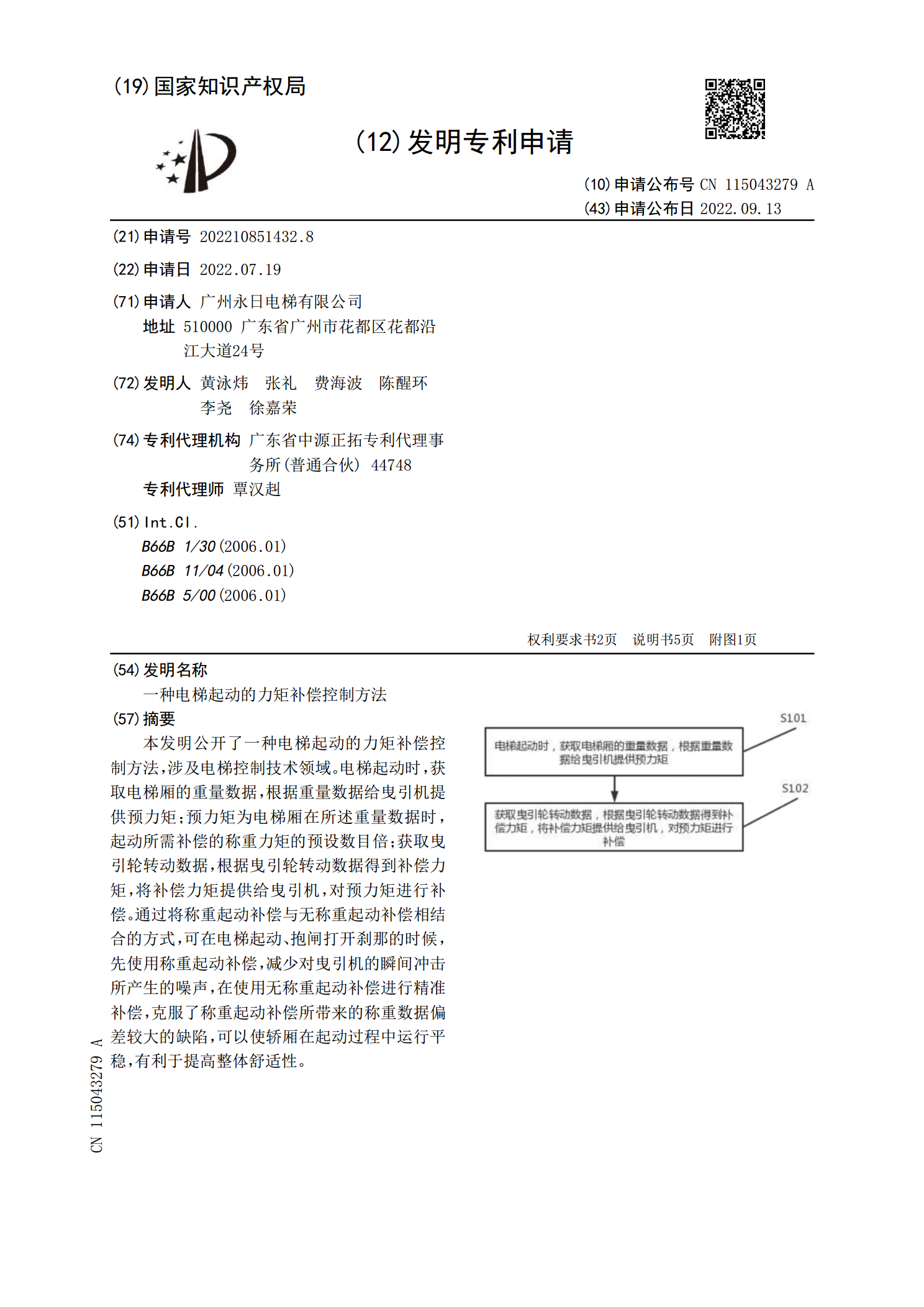
本发明公开了一种电梯起动的力矩补偿控制方法,涉及电梯控制技术领域。电梯起动时,获取电梯厢的重量数据,根据重量数据给曳引机提供预力矩;预力矩为电梯厢在所述重量数据时,起动所需补偿的称重力矩的预设数目倍;获取曳引轮转动数据,根据曳引轮转动数据得到补偿力矩,将补偿力矩提供给曳引机,对预力矩进行补偿。通过将称重起动补偿与无称重起动补偿相结合的方式,可在电梯起动、抱闸打开刹那的时候,先使用称重起动补偿,减少对曳引机的瞬间冲击所产生的噪声,在使用无称重起动补偿进行精准补偿,克服了称重起动补偿所带来的称重数据偏差较大的

一种力矩补偿器控制方法及装置.pdf
本发明提供了一种力矩补偿器控制方法及装置,由补偿器本体、支撑机构、连接环、支撑架、控制机构和挂钩配合完成的作业,本发明可以解决在力矩补偿器与两侧布置的外接管道对接后,补偿器的伸缩部分被拉伸较长后,由于伸缩部分的外部没有相应的固定结构,输送的介质在较大压力的冲击下,当其经过伸缩部分时容易使得伸缩部分出现晃动的情况,且晃动幅度较大,且伸缩部分的长度也没有相应的机构对其进行控制等问题。
一种转向力矩补偿方法、装置及车辆.pdf
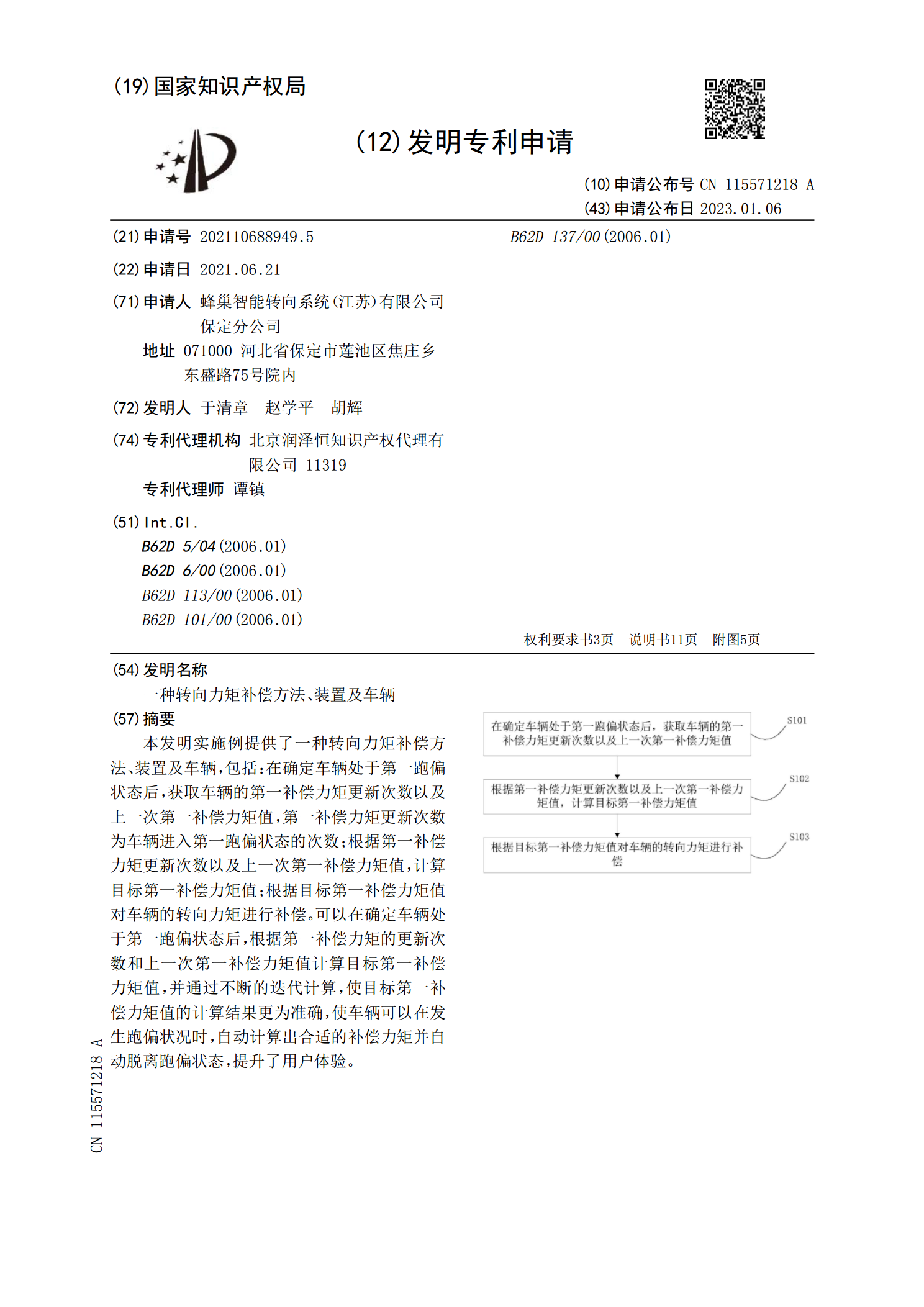
本发明实施例提供了一种转向力矩补偿方法、装置及车辆,包括:在确定车辆处于第一跑偏状态后,获取车辆的第一补偿力矩更新次数以及上一次第一补偿力矩值,第一补偿力矩更新次数为车辆进入第一跑偏状态的次数;根据第一补偿力矩更新次数以及上一次第一补偿力矩值,计算目标第一补偿力矩值;根据目标第一补偿力矩值对车辆的转向力矩进行补偿。可以在确定车辆处于第一跑偏状态后,根据第一补偿力矩的更新次数和上一次第一补偿力矩值计算目标第一补偿力矩值,并通过不断的迭代计算,使目标第一补偿力矩值的计算结果更为准确,使车辆可以在发生跑偏状况时

一种电梯紧急制动力矩测试方法.pdf
本发明公开了一种电梯紧急制动力矩测试方法,步骤包括:测量曳引轮直径D、轿厢的重量P、对重的重量W;在电梯轿厢上安装加速度测试仪;使电梯分别在空载、装载额定载荷、装载1.25倍额定载荷情况下,向下运行至匀速状态,然后断电,在断电瞬间,电梯紧急制动,分别使用加速度测试仪测得各情况下的加速度a1、加速度a2、加速度a3;将加速度a1、a2、a3分别代入紧急制动力矩计算公式,得到紧急制动力矩M1、M2以及M3;比较电梯在不同载重下的紧急制动力矩,得到最大值的紧急制动力矩。本发明从力学角度出发,研究了制动器在紧急制
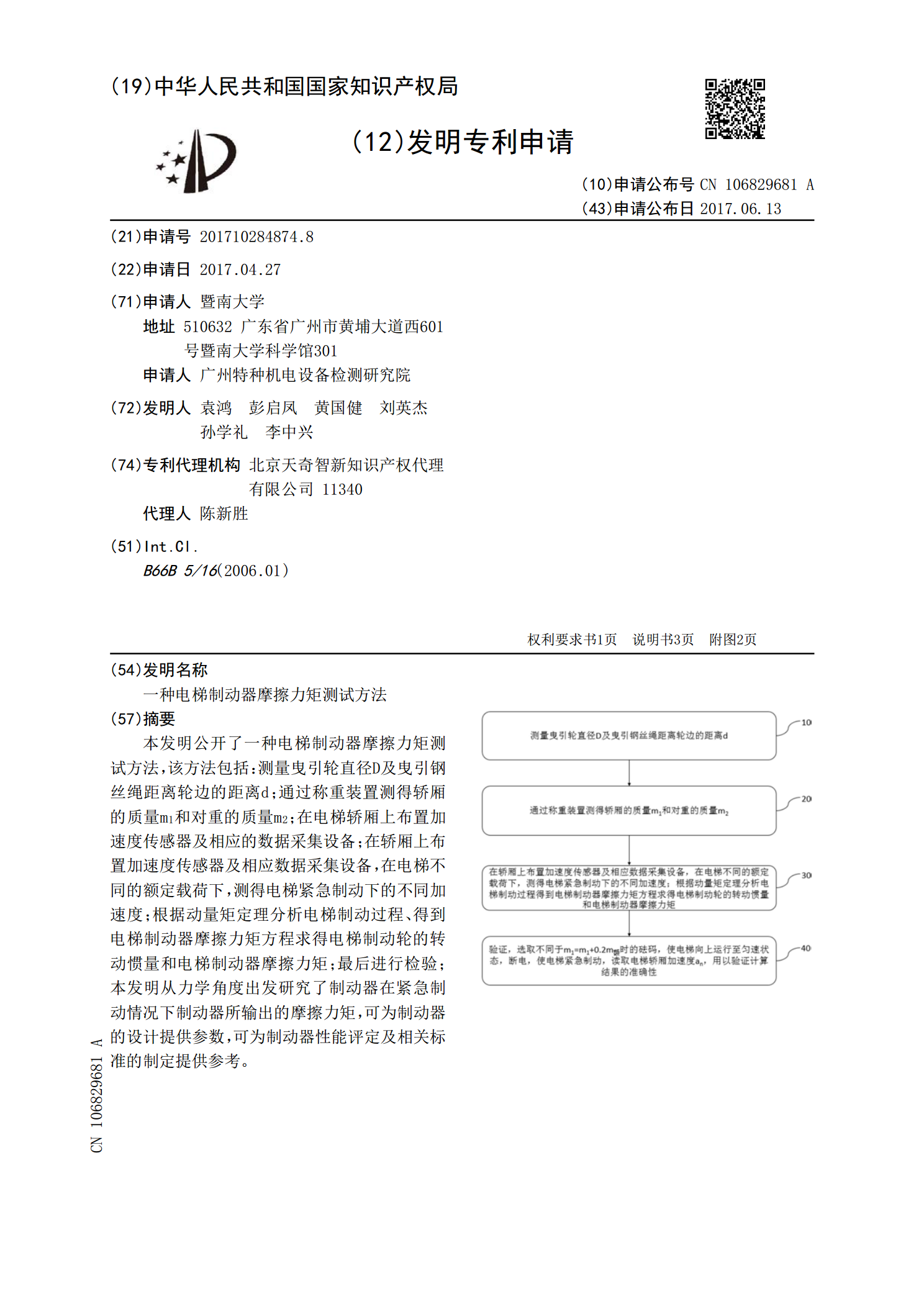
一种电梯制动器摩擦力矩测试方法.pdf
本发明公开了一种电梯制动器摩擦力矩测试方法,该方法包括:测量曳引轮直径D及曳引钢丝绳距离轮边的距离d;通过称重装置测得轿厢的质量m