
基于自然驾驶数据的仿真场景构建方法及系统.pdf

代瑶****zy


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于自然驾驶数据的仿真场景构建方法及系统.pdf
基于自然驾驶数据的仿真场景搭建方法及系统,涉及自动驾驶技术领域中驾驶场景的构建技术。解决了现有自动驾驶场景构建方法依赖于手工搭建、可移植性差,并且无法完全还原全部动态信息的问题。所述方法采集自然驾驶情况下获得的场景数据作为基础;从其中提取csv信息;将本车坐标与目标车坐标转转到同一坐标系中;利用开源地图OSM和采集获得的场景数据生成静态地图;将车道信息、本车信息和目标车信投影至所述静态地图中,同时对所述静态地图中的路网信息进行修正;通过SCP指令将所述csv信息转换成xml格式文件;以时间为触发条件,将修
一种基于路侧设备自然驾驶数据的仿真场景构建方法.pdf
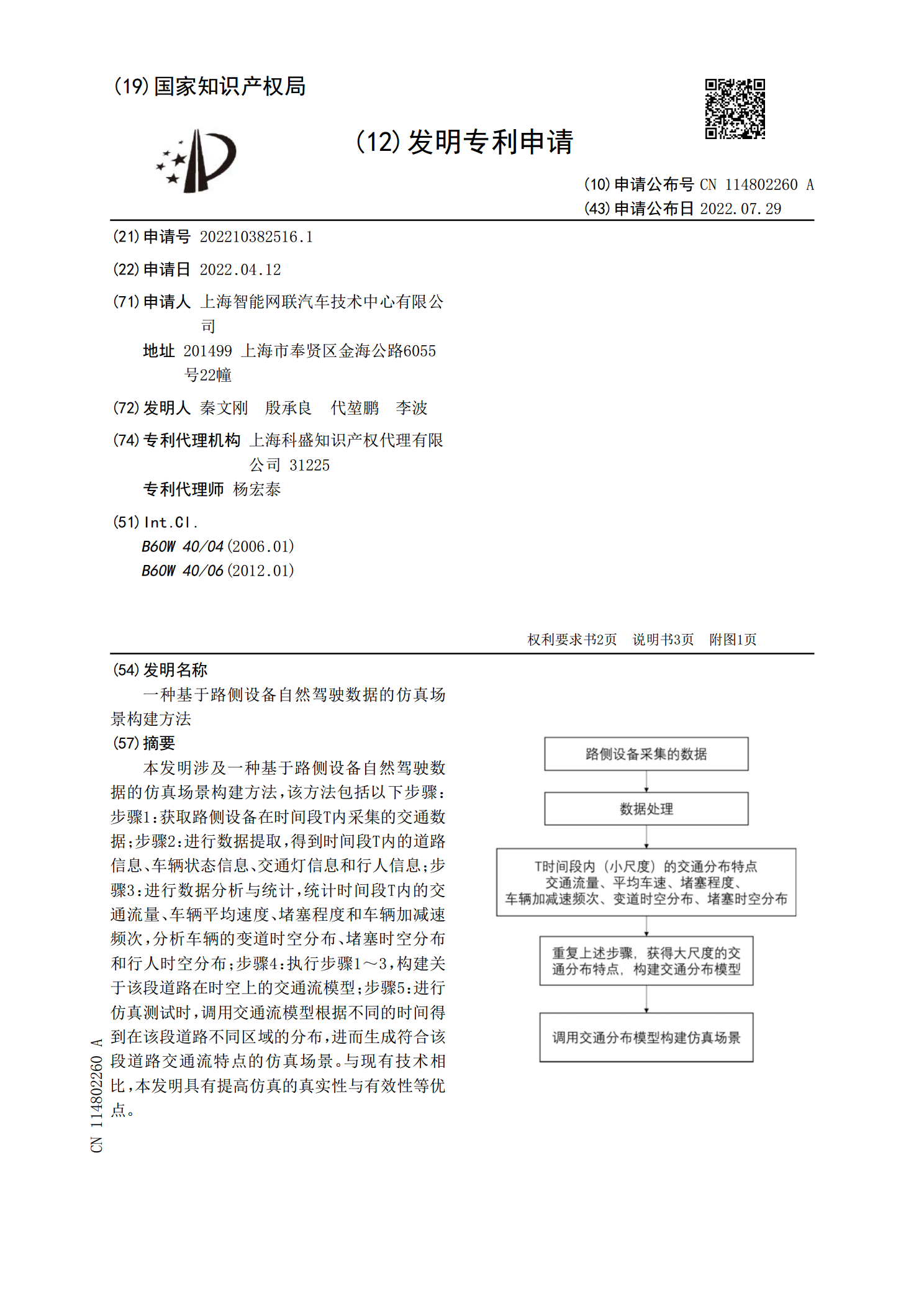
本发明涉及一种基于路侧设备自然驾驶数据的仿真场景构建方法,该方法包括以下步骤:步骤1:获取路侧设备在时间段T内采集的交通数据;步骤2:进行数据提取,得到时间段T内的道路信息、车辆状态信息、交通灯信息和行人信息;步骤3:进行数据分析与统计,统计时间段T内的交通流量、车辆平均速度、堵塞程度和车辆加减速频次,分析车辆的变道时空分布、堵塞时空分布和行人时空分布;步骤4:执行步骤1~3,构建关于该段道路在时空上的交通流模型;步骤5:进行仿真测试时,调用交通流模型根据不同的时间得到在该段道路不同区域的分布,进而生成符

一种基于自然驾驶数据的危险场景库构建方法.pdf
本发明提出了一种基于自然驾驶数据的危险场景库构建方法,包括:首先从自然驾驶数据中选取若干参数,将这些参数作为聚类分析指标;利用cophenet函数计算聚类树信息与原始数据的距离之间的相关性,选取最适合的聚类方法;根据所选用的聚类方法对样品进行聚类,确定簇的个数;再采用K均值聚类法重新聚类,引入轮廓值判断聚类质量。其次,对聚类结果进行卡方检验,通过卡方检验得出的显著性结果,提取出每一类危险场景中的显著性因素,进行危险场景重构和扩展。

基于Prescan的自然驾驶场景构建与研究.docx
基于Prescan的自然驾驶场景构建与研究基于Prescan的自然驾驶场景构建与研究摘要:自然驾驶是指无人驾驶车辆在真实世界中能够在不受限制的自由交通环境中进行驾驶,具有极高的挑战性。为了能够实现自然驾驶,需要建立真实世界的驾驶场景,并在其中进行研究。本论文提出了一种基于Prescan的自然驾驶场景构建与研究方法,并以此为基础开展了相关实验。实验结果表明,该方法可以有效地构建自然驾驶场景,并提供了一个可靠的环境用于驾驶算法的研究。关键词:自然驾驶;Prescan;场景构建;研究方法;驾驶算法1.引言随着自

基于Prescan的自然驾驶场景构建与研究.pptx
基于Prescan的自然驾驶场景构建与研究目录添加章节标题Prescan软件介绍Prescan软件的功能与特点Prescan在自然驾驶场景构建中的优势Prescan软件的应用领域自然驾驶场景构建方法基于Prescan的自然驾驶场景构建流程场景要素的确定与设计场景的仿真与验证场景构建的优化与改进自然驾驶场景研究内容自然驾驶场景中的交通参与者行为研究自然驾驶场景中的道路条件与交通设施研究自然驾驶场景中的交通流特性研究自然驾驶场景中的交通安全问题研究自然驾驶场景的应用价值对自动驾驶技术发展的推动作用在智能交通系