
基于多尺度块LBP算子无鬼影多曝光图像融合算法.pdf

思洁****爱吗

1/10
2/10

3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于多尺度块LBP算子无鬼影多曝光图像融合算法.pdf
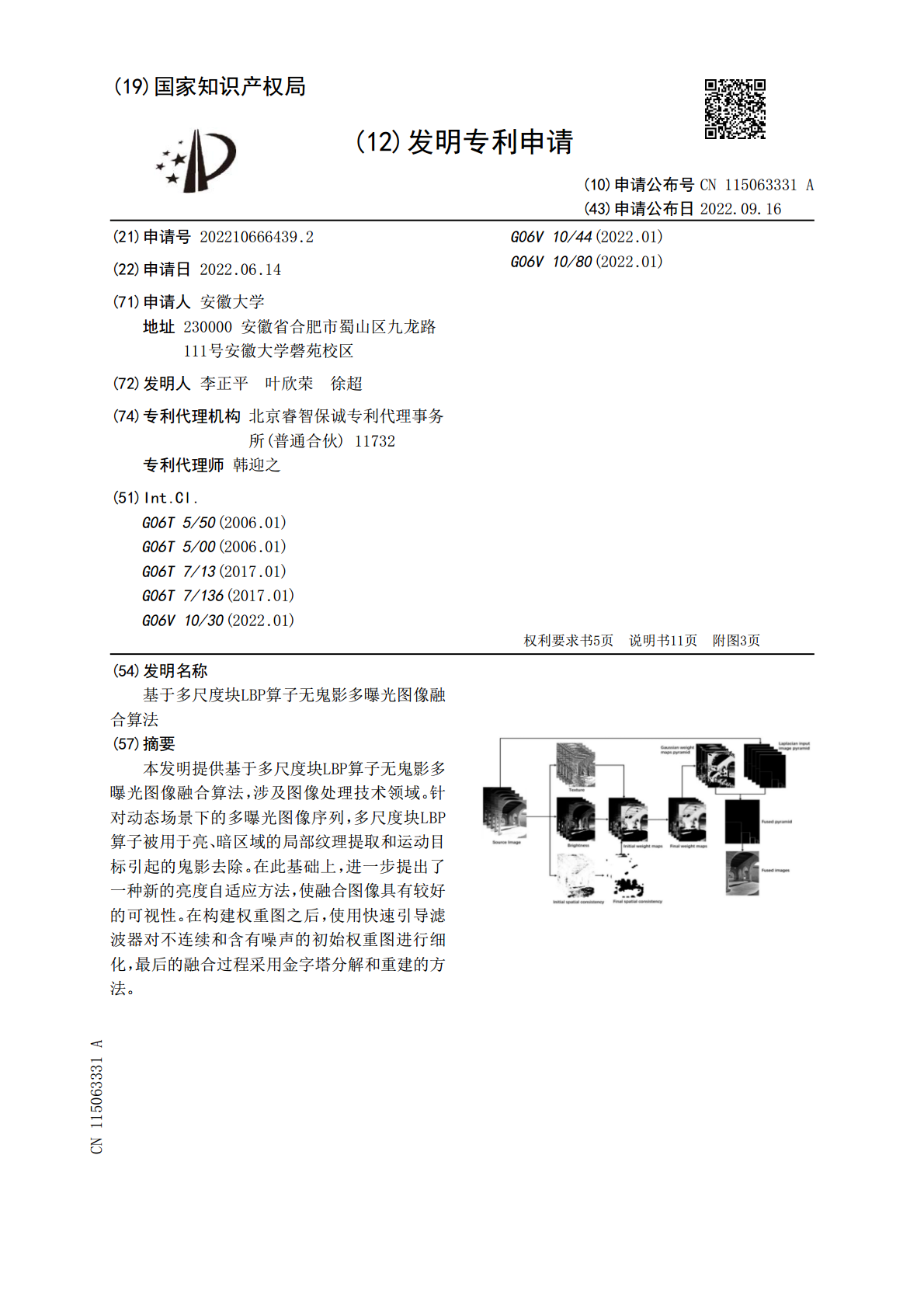
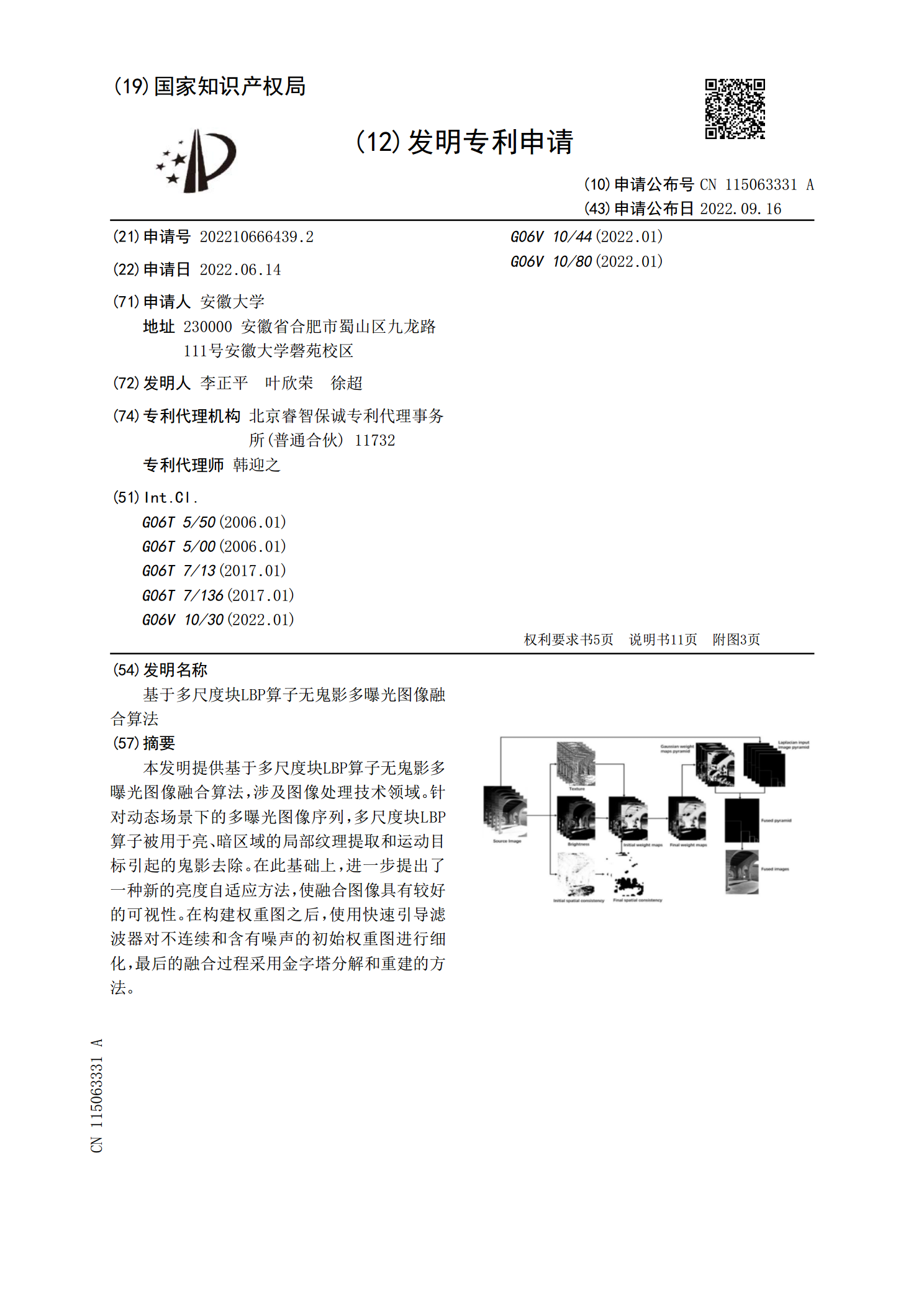
本发明提供基于多尺度块LBP算子无鬼影多曝光图像融合算法,涉及图像处理技术领域。针对动态场景下的多曝光图像序列,多尺度块LBP算子被用于亮、暗区域的局部纹理提取和运动目标引起的鬼影去除。在此基础上,进一步提出了一种新的亮度自适应方法,使融合图像具有较好的可视性。在构建权重图之后,使用快速引导滤波器对不连续和含有噪声的初始权重图进行细化,最后的融合过程采用金字塔分解和重建的方法。

基于图像块分解的多曝光图像融合去鬼影算法.pptx
添加副标题目录PART01PART02算法定义算法应用场景算法目标算法流程PART03图像块选择图像块分解方法图像块特征提取图像块分类与匹配PART04图像融合基本原理融合策略选择融合效果评价融合结果优化PART05鬼影产生原因分析去鬼影算法设计去鬼影效果评估算法优缺点分析PART06实验设置与数据集实验过程与结果展示结果分析与讨论算法性能比较与提升空间PART07算法总结与贡献未来研究方向与挑战感谢您的观看

基于导向滤波的鬼影消除多曝光图像融合.docx
基于导向滤波的鬼影消除多曝光图像融合Title:GhostSuppressionandImageFusioninMulti-ExposureImageusingGuidedFilter1.Introduction(200-250words)Multimodalimagingtechniques,suchashighdynamicrange(HDR)andexposurefusion,havegainedsignificantattentioninrecentyearsduetotheirabilityto

一种无鬼影多曝光图像融合方法、装置.pdf
本发明提供一种无鬼影多曝光图像融合方法、装置、计算机设备及可读存储介质,结合亮度映射与一致性检测实现了源序列图像向参考图像的对齐,得到运动对象一致的不同曝光亮度潜像序列;基于加权最小二乘滤波器,本发明可结合不同曝光图像序列中的有利信息,对图像中过暗区域与过亮区域的亮度进行提升与抑制,从而保留了不同层次亮度上的细节,最终得到色彩生动且信息丰富的无鬼影图像,有效增强了融合图像的视觉质量与动态范围。本发明可满足对不同动态场景下的多曝光融合需求,能有效解决成像场景受移动对象或成像设备抖动引入的鬼影问题。

基于Retinex理论的多曝光图像融合算法.docx
基于Retinex理论的多曝光图像融合算法基于Retinex理论的多曝光图像融合算法摘要:随着数字摄影技术的发展,多曝光图像融合成为了一个重要的研究领域。传统的图像融合方法往往只是简单地对曝光过的图像进行加权平均,无法完全还原真实场景的亮度和色彩信息。为了解决这个问题,本研究提出了基于Retinex理论的多曝光图像融合算法,通过模拟人类视觉系统的工作原理,从多曝光图像中提取出真实场景的亮度和色彩信息,实现高质量的图像融合。1.引言多曝光图像是在相同场景下以不同曝光时间拍摄得到的多张图像。由于摄影设备的限制