
基于磁流变脂的机械臂通用抓手.pdf

是你****平呀

1/7
2/7
3/7
4/7
5/7
6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于磁流变脂的机械臂通用抓手.pdf
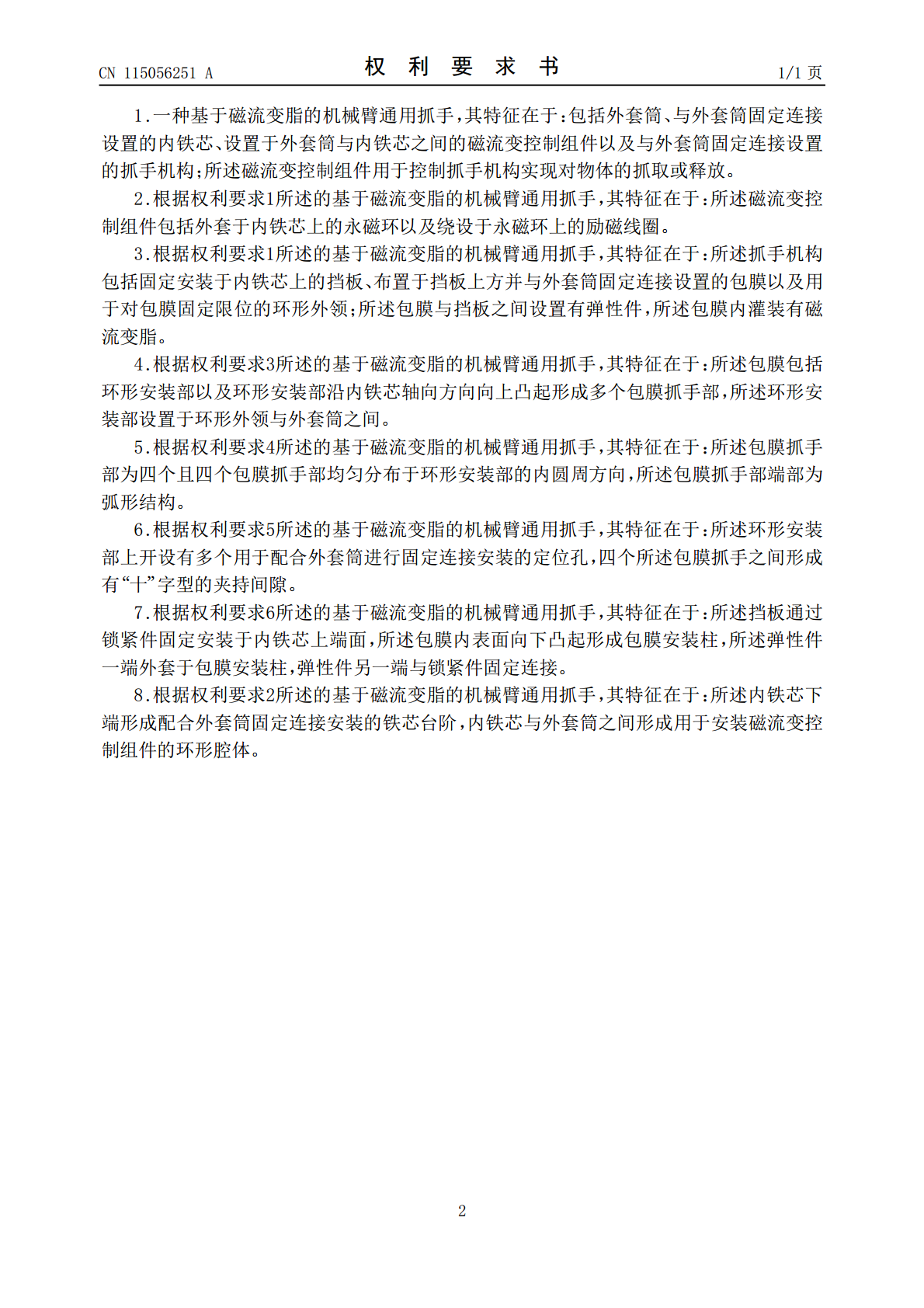
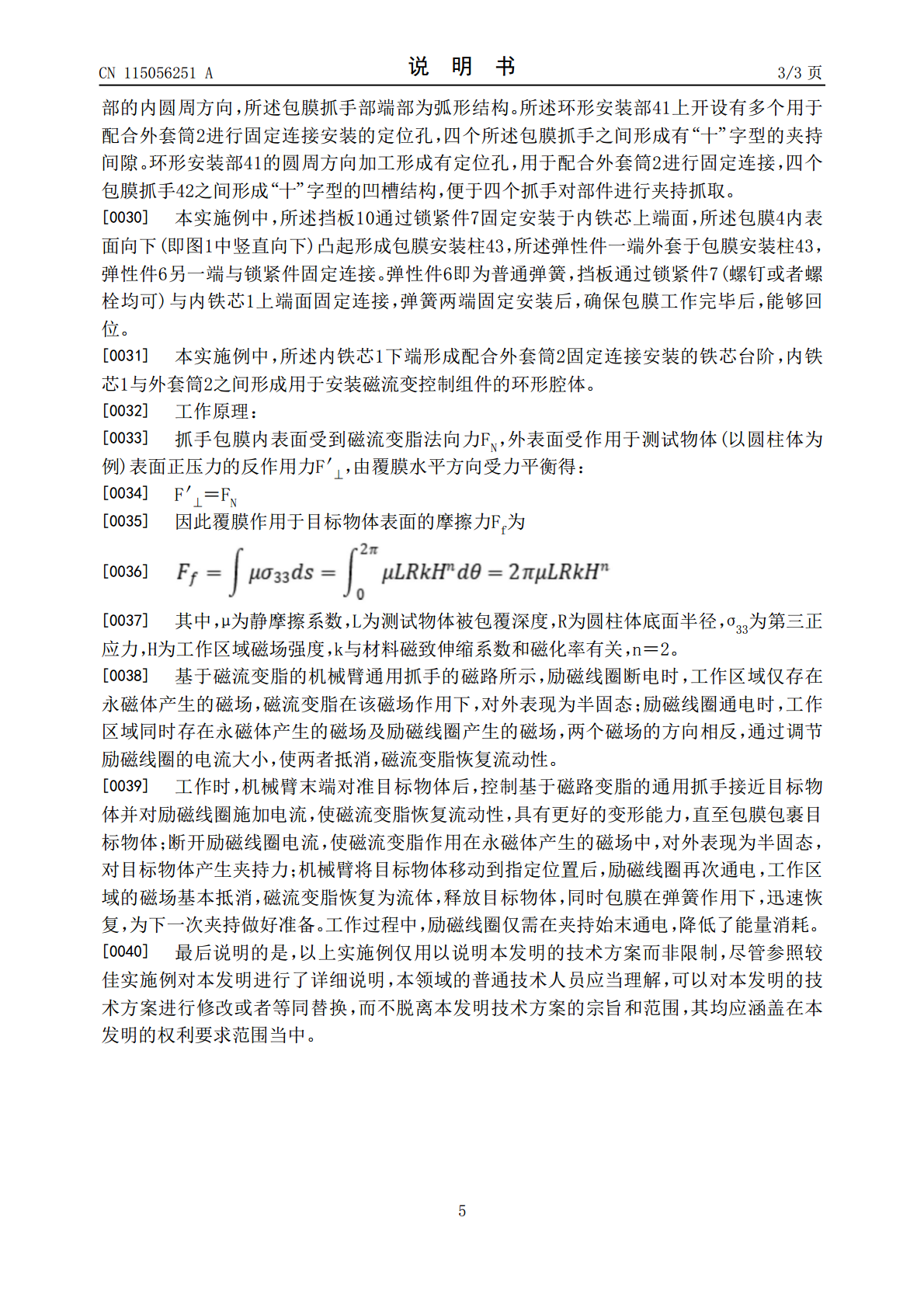
本发明公开了一种基于磁流变脂的机械臂通用抓手,包括外套筒、与外套筒固定连接设置的内铁芯、设置于外套筒与内铁芯之间的磁流变控制组件以及与外套筒固定连接设置的抓手机构;所述磁流变控制组件用于控制抓手机构实现对物体的抓取或释放,本技术方案的机械臂通用抓手具有很好的通用性,实现柔性抓取,降低抓取时对物体的冲击,不易对目标物体产生破坏,能够抓取不同形状、尺寸的物体;由于磁流变脂的响应时间短、所需电压小,因此该抓手具有响应快、能耗低的优点,结构简单、成本低且易于维护。

基于磁流变原理的柔性机械臂抑振技术研究.docx
基于磁流变原理的柔性机械臂抑振技术研究摘要:柔性机械臂作为一种新型的机器人装置,其灵活轻便的特点受到越来越多的关注。然而,由于其结构上存在一定的缺陷,在高速运动过程中会产生明显的振动,从而严重影响到其应用效果。针对这一问题,本文从磁流变原理出发,提出了一种基于磁流变技术的抑振控制方法,并通过仿真实验证明了该方法的有效性。关键词:柔性机械臂,磁流变,抑振控制,仿真正文:1.引言柔性机械臂作为一种新型的机器人装置,由于其灵活轻便的特点,受到了广泛的关注。柔性机械臂由于自身结构具有柔性,应用于高速运动时会导致明

基于磁流变原理的柔性机械臂抑振技术研究的任务书.docx
基于磁流变原理的柔性机械臂抑振技术研究的任务书任务书1.研究背景随着机器人技术的不断发展,柔性机械臂被越来越广泛地应用于工业生产、医疗护理、消费电子和娱乐等领域。相对于刚性机械臂,柔性机械臂具有更好的柔韧性和适应性,能够适应复杂的环境和任务,同时也可以有效减小对工作环境和人体的伤害风险。然而,柔性机械臂的振动问题限制了它的精度和速度,影响了整个系统的性能和效率,因此对其抑振技术的研究成为了当前的热点和挑战。2.研究目的本次研究旨在探究一种基于磁流变原理的柔性机械臂抑振技术,以解决柔性机械臂的振动问题,提高

一种独立活塞控制式磁流变脂减振器.pdf
本申请公开了一种独立活塞控制式磁流变脂减振器,内缸筒设置于外缸筒内侧,上导向座设置于内缸筒上端,下底座总成设置于内缸筒下端;外缸筒上方连接有上端盖,外缸筒下方连接有下端盖;出杆套筒与下端盖通过螺栓连接,阀体机构设置于内缸筒内部。当外部激励使阀体机构移动时,形成压差,减振器内磁流变脂流动;通过控制下底座总成或阀体机构中活塞线圈的输入电流,能改变磁流变脂的屈服应力,进而改变减振器内整体磁流变脂的流动模式,产生不同的阻尼力。本申请采用磁流变脂作为基体,具有更高的输出阻尼力,且不易泄露;减振器在最大阻尼力不变的前

汽车磁流变脂碰撞缓冲器的结构优化研究.docx
汽车磁流变脂碰撞缓冲器的结构优化研究随着汽车行业的发展,汽车的安全性和舒适性越来越受到重视。汽车磁流变脂碰撞缓冲器作为一种新型减震器,具有结构简单、工作可靠、体积小、重量轻等优点,在汽车碰撞事故中有着广泛的应用前景。本文将从结构优化方面探讨汽车磁流变脂碰撞缓冲器的研究进展。一、磁流变脂的基本特性磁流变脂是一种智能材料,具有在外加磁场的作用下改变其粘度和流变性的特性,从而实现智能控制。其特点主要有以下几个方面:1.与普通液体相比,磁流变脂粘度的变化范围大,可达到数百倍以上。2.磁流变脂具有良好的稳定性和可重