
一种水平旋转式刀闸状态精确识别装置及合闸状态判断方法.pdf

音景****ka


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种水平旋转式刀闸状态精确识别装置及合闸状态判断方法.pdf
本发明公开了一种水平旋转式刀闸状态精确识别装置及合闸状态判断方法,用于识别变电站的水平旋转式刀闸是否准确合闸到位。该装置包括:摄像头、刀闸识别前端装置、刀闸识别后台学习训练装置、数据及控制总线;所述数据及控制总线用于在摄像头、刀闸识别前端装置和刀闸识别后台学习训练装置之间传递数据和控制信号。刀闸是变电站中极其重要的设备,长期的使用容易导致刀闸合闸不到位,引起发热乃至爆炸等严重事故。本发明采用云边融合的架构,利用MaskR‑CNN网络进行目标识别,再使用HED方法进行边缘提取,并在此基础上提出了一个检测合
一种垂直伸缩式刀闸状态精确识别装置及合闸状态判断方法.pdf
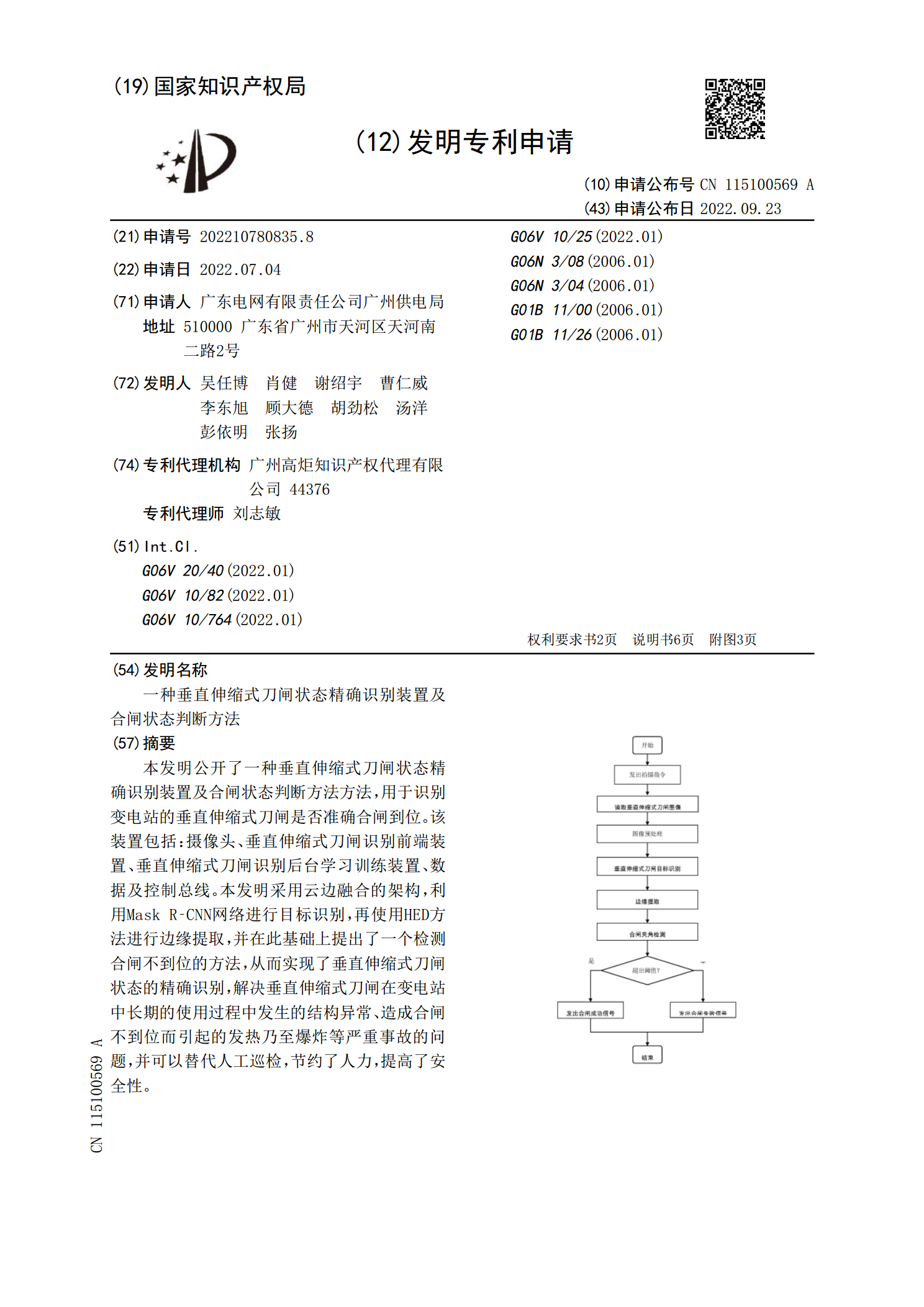
本发明公开了一种垂直伸缩式刀闸状态精确识别装置及合闸状态判断方法方法,用于识别变电站的垂直伸缩式刀闸是否准确合闸到位。该装置包括:摄像头、垂直伸缩式刀闸识别前端装置、垂直伸缩式刀闸识别后台学习训练装置、数据及控制总线。本发明采用云边融合的架构,利用MaskR‑CNN网络进行目标识别,再使用HED方法进行边缘提取,并在此基础上提出了一个检测合闸不到位的方法,从而实现了垂直伸缩式刀闸状态的精确识别,解决垂直伸缩式刀闸在变电站中长期的使用过程中发生的结构异常、造成合闸不到位而引起的发热乃至爆炸等严重事故的问题
一种垂直伸缩式刀闸合闸到位识别装置及合闸状态判断方法.pdf
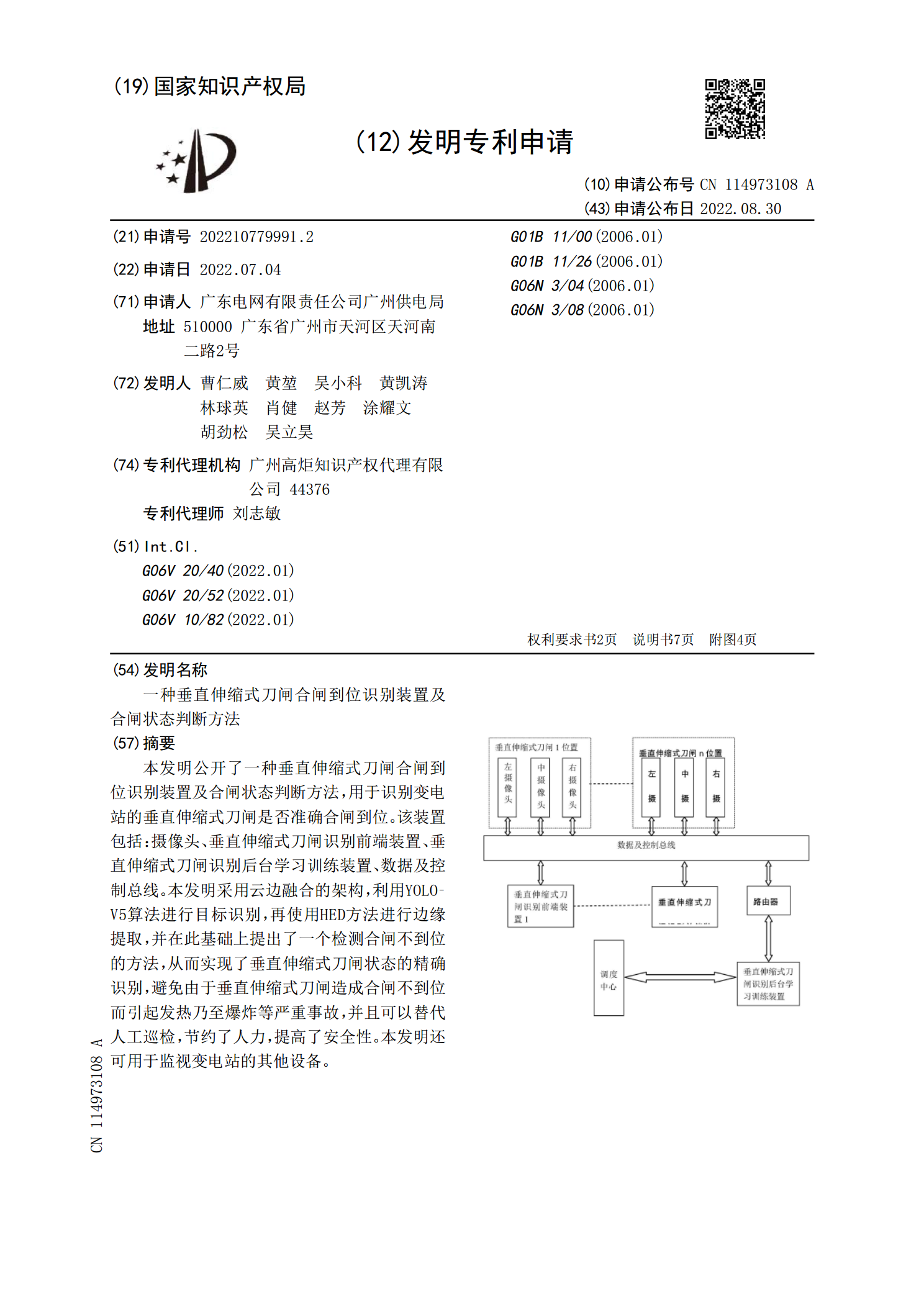
本发明公开了一种垂直伸缩式刀闸合闸到位识别装置及合闸状态判断方法,用于识别变电站的垂直伸缩式刀闸是否准确合闸到位。该装置包括:摄像头、垂直伸缩式刀闸识别前端装置、垂直伸缩式刀闸识别后台学习训练装置、数据及控制总线。本发明采用云边融合的架构,利用YOLO‑V5算法进行目标识别,再使用HED方法进行边缘提取,并在此基础上提出了一个检测合闸不到位的方法,从而实现了垂直伸缩式刀闸状态的精确识别,避免由于垂直伸缩式刀闸造成合闸不到位而引起发热乃至爆炸等严重事故,并且可以替代人工巡检,节约了人力,提高了安全性。本发明
路面状态判断方法及路面状态判断装置.pdf
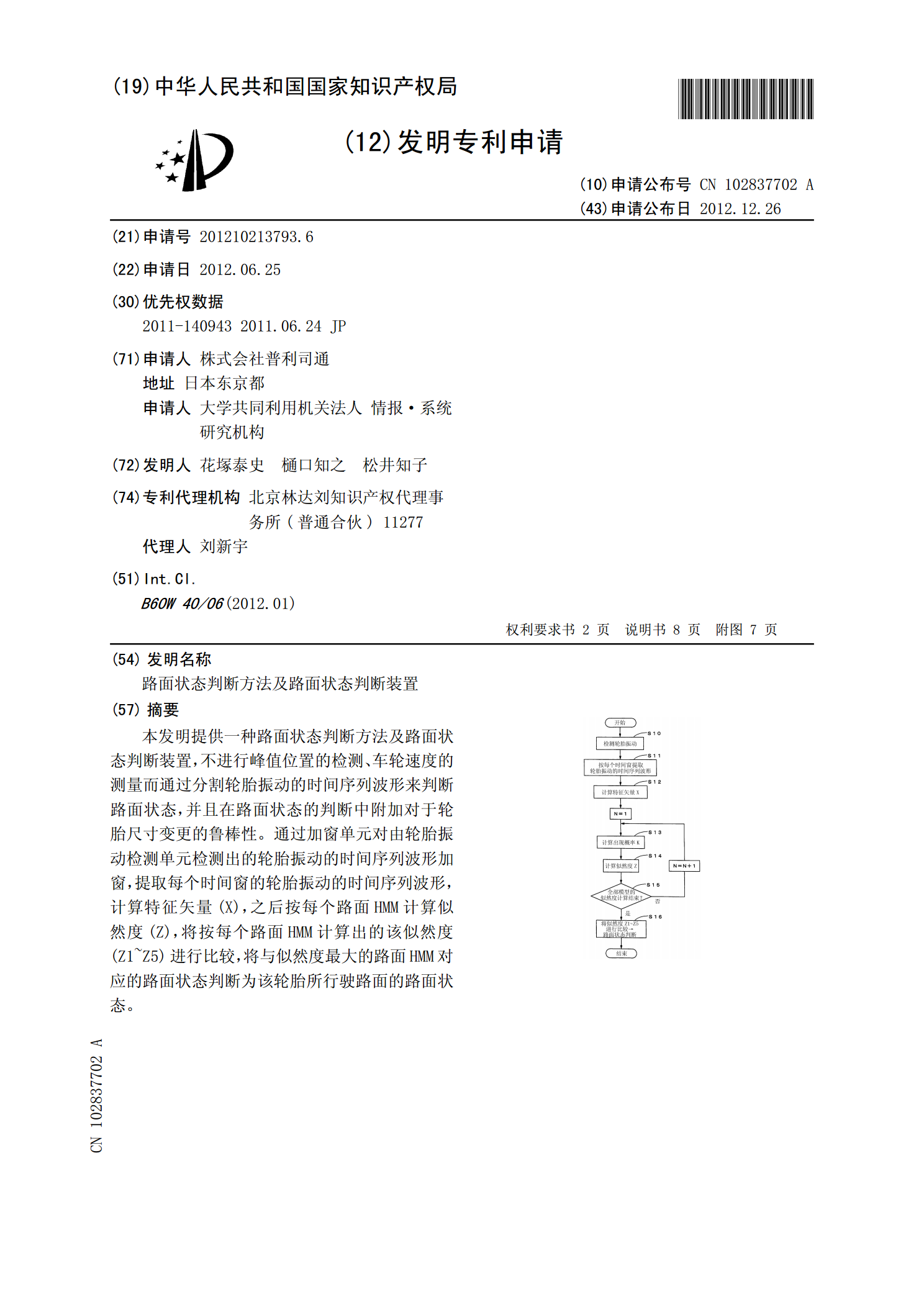
本发明提供一种路面状态判断方法及路面状态判断装置,不进行峰值位置的检测、车轮速度的测量而通过分割轮胎振动的时间序列波形来判断路面状态,并且在路面状态的判断中附加对于轮胎尺寸变更的鲁棒性。通过加窗单元对由轮胎振动检测单元检测出的轮胎振动的时间序列波形加窗,提取每个时间窗的轮胎振动的时间序列波形,计算特征矢量(X),之后按每个路面HMM计算似然度(Z),将按每个路面HMM计算出的该似然度(Z1~Z5)进行比较,将与似然度最大的路面HMM对应的路面状态判断为该轮胎所行驶路面的路面状态。

一种变电站刀闸状态和合闸不到位的检测方法及其系统.pdf
本申请提出了一种变电站刀闸状态和合闸不到位的检测方法,该方法包括如下步骤:S1、获取待检测变电站刀闸的红外图像,对获取的所述红外图像进行预处理;S2、将预处理后的所述红外图像导入红外刀闸状态目标检测模型进一步分析并计算,获取位置坐标信息;S3、根据所述位置坐标信息获取所述红外图像内所述刀闸的图像;S4、判断所述刀闸的状态是否正确;S5、进一步对S3获取的所述刀闸的图像进行处理并获取所述刀闸的温度值;S6、比对所述刀闸的温度值与预设的异常温度值的阈值,判断所述刀闸是否处于合闸状态。通过判断刀闸的合闸或者开闸