
一种波浪滑翔器全局路径规划方法及系统.pdf

元枫****文章

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种波浪滑翔器全局路径规划方法及系统.pdf
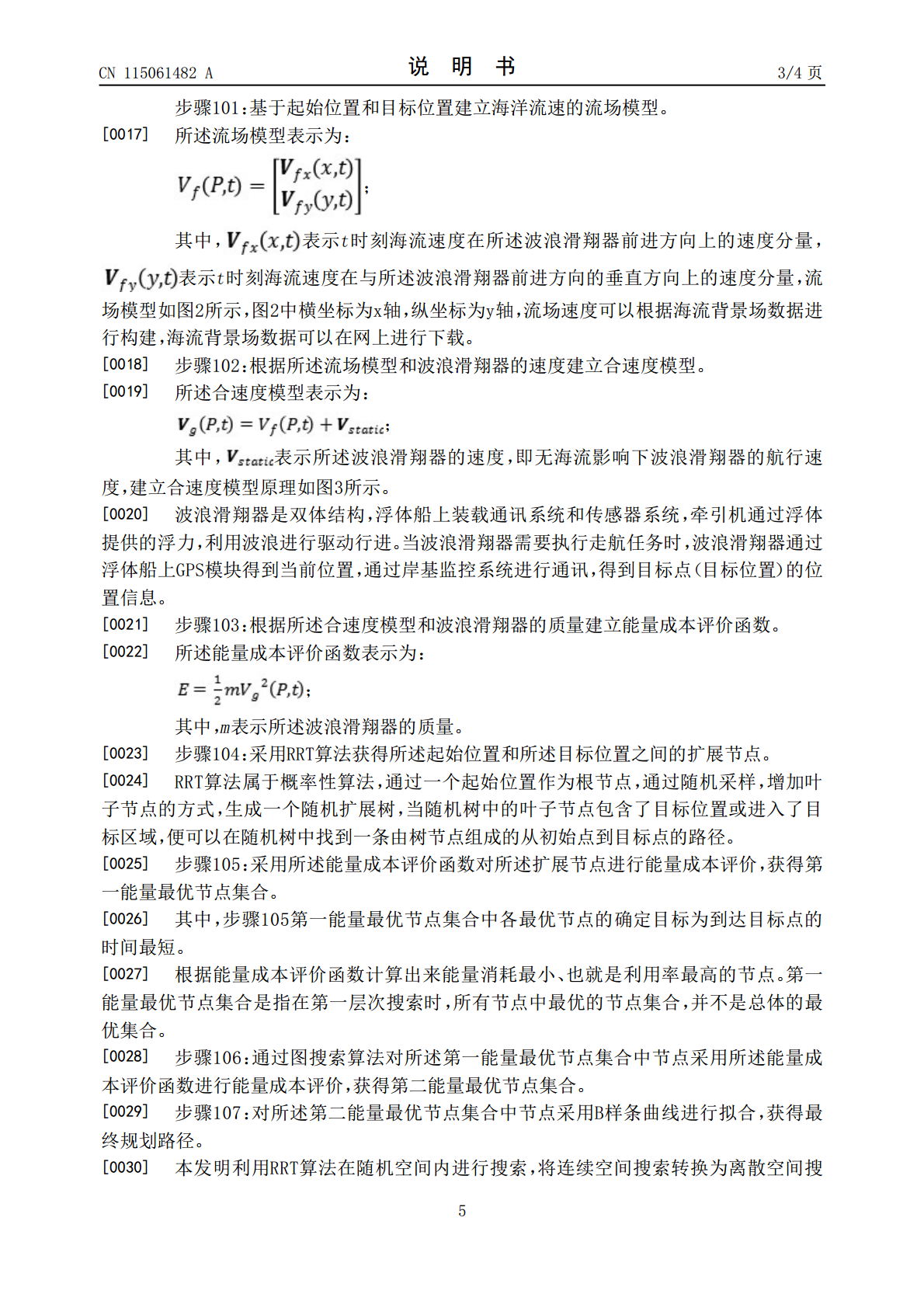
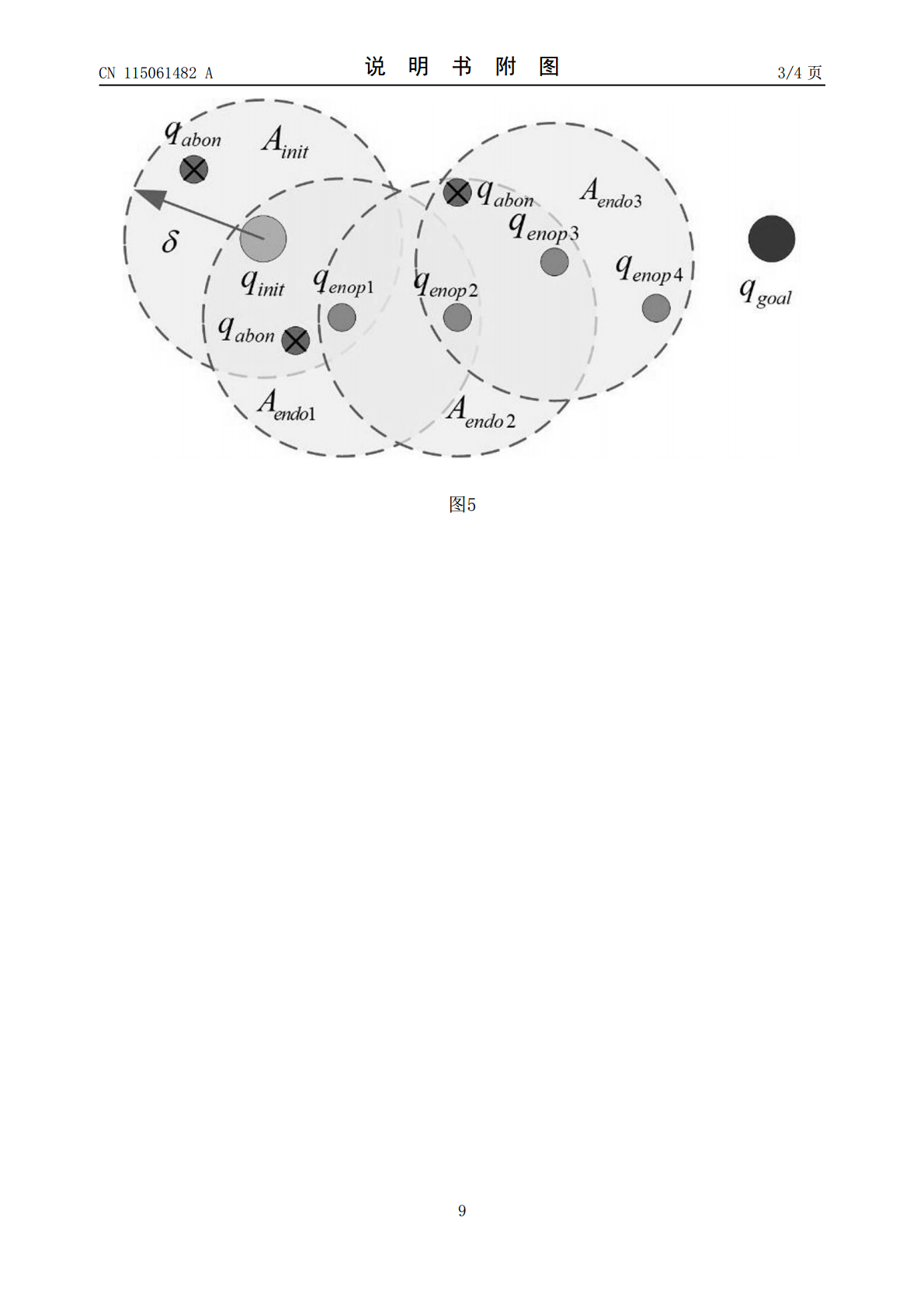
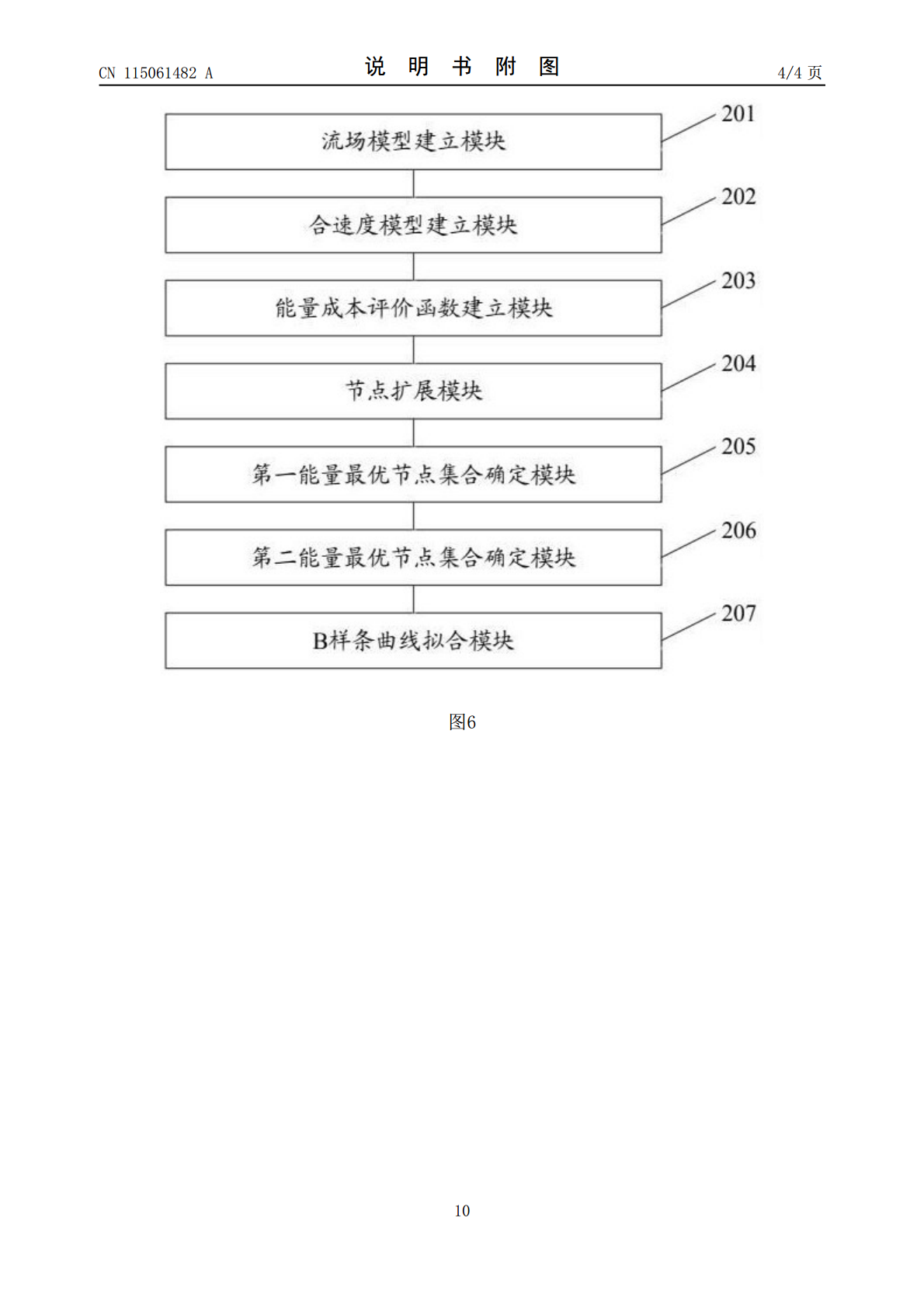
本发明涉及一种波浪滑翔器全局路径规划方法及系统,涉及路径规划领域,该方法包括:基于起始位置和目标位置建立海洋流速的流场模型;根据所述流场模型和波浪滑翔器的速度建立合速度模型;根据所述合速度模型和波浪滑翔器的质量建立能量成本评价函数;采用RRT算法获得所述起始位置和所述目标位置之间的扩展节点;采用所述能量成本评价函数对所述扩展节点进行能量成本评价,获得第一能量最优节点集合;通过图搜索算法对所述第一能量最优节点集合中节点采用所述能量成本评价函数进行能量成本评价,获得第二能量最优节点集合;对所述第二能量最优节点

一种波浪滑翔器短时定位缺失的导航方法及系统.pdf
本发明公开了一种波浪滑翔器短时定位缺失的导航方法及系统,涉及导航与控制领域,导航方法包括以下步骤:判断GPS定位模块是否正常工作;若是,则根据GPS定位模块提供的位置信息进行导航路径解算,得到导航路径;若否,则分别获取由GPS定位模块提供的最后有效位置信息、由多普勒计程仪提供航行的速度信息以及由航姿参考模块提供的姿态信息与角速度信息;采用滤波算法对最后有效位置信息、速度信息、姿态信息与角速度信息进行航位推算,得到波浪滑翔器的当前位置信息;根据波浪滑翔器的当前位置信息进行导航路径解算,得到导航路径。本发明能
一种基于波浪滑翔器的水声环境观测系统.pdf
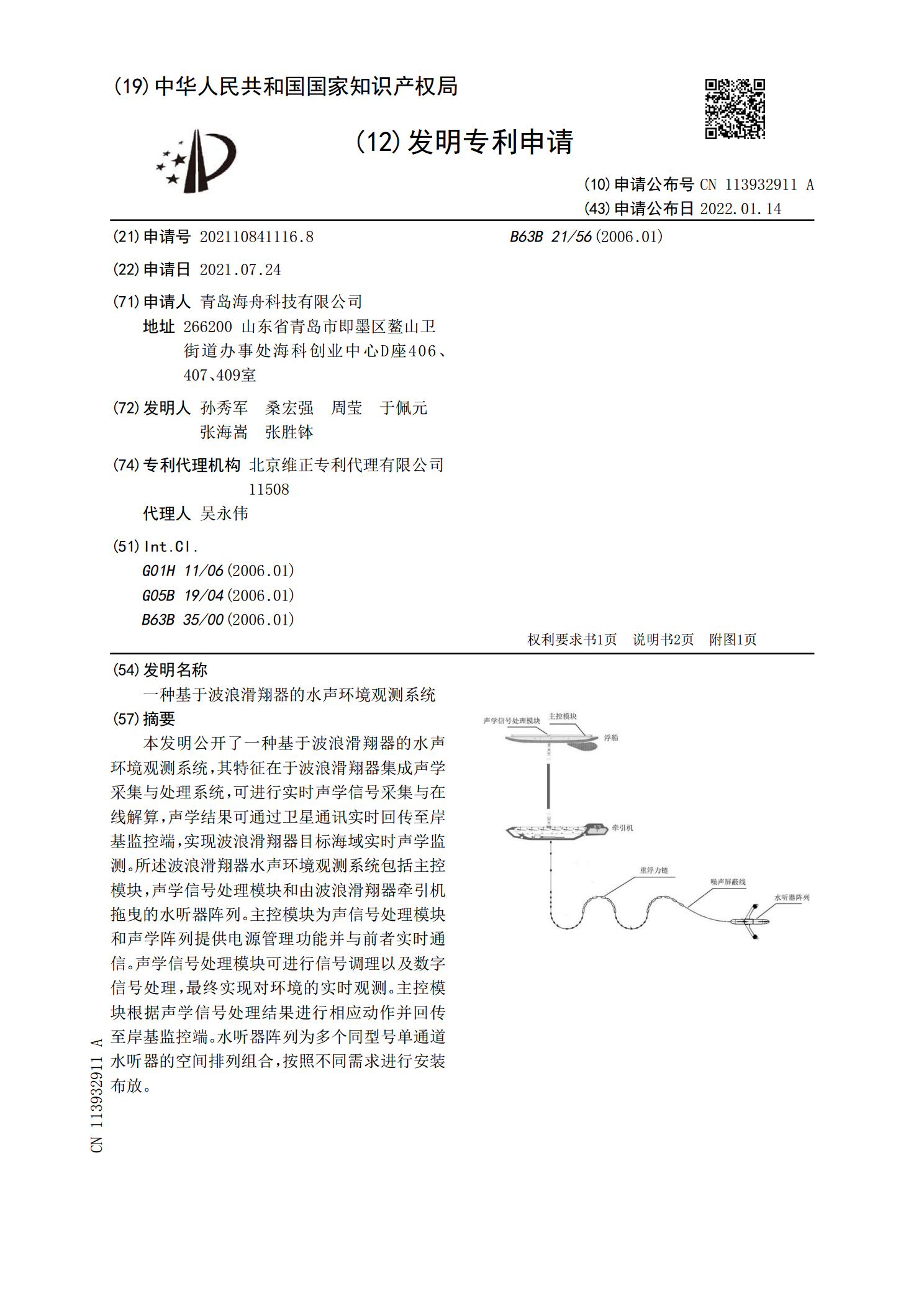
本发明公开了一种基于波浪滑翔器的水声环境观测系统,其特征在于波浪滑翔器集成声学采集与处理系统,可进行实时声学信号采集与在线解算,声学结果可通过卫星通讯实时回传至岸基监控端,实现波浪滑翔器目标海域实时声学监测。所述波浪滑翔器水声环境观测系统包括主控模块,声学信号处理模块和由波浪滑翔器牵引机拖曳的水听器阵列。主控模块为声信号处理模块和声学阵列提供电源管理功能并与前者实时通信。声学信号处理模块可进行信号调理以及数字信号处理,最终实现对环境的实时观测。主控模块根据声学信号处理结果进行相应动作并回传至岸基监控端。水
波浪滑翔器收放装置.pdf
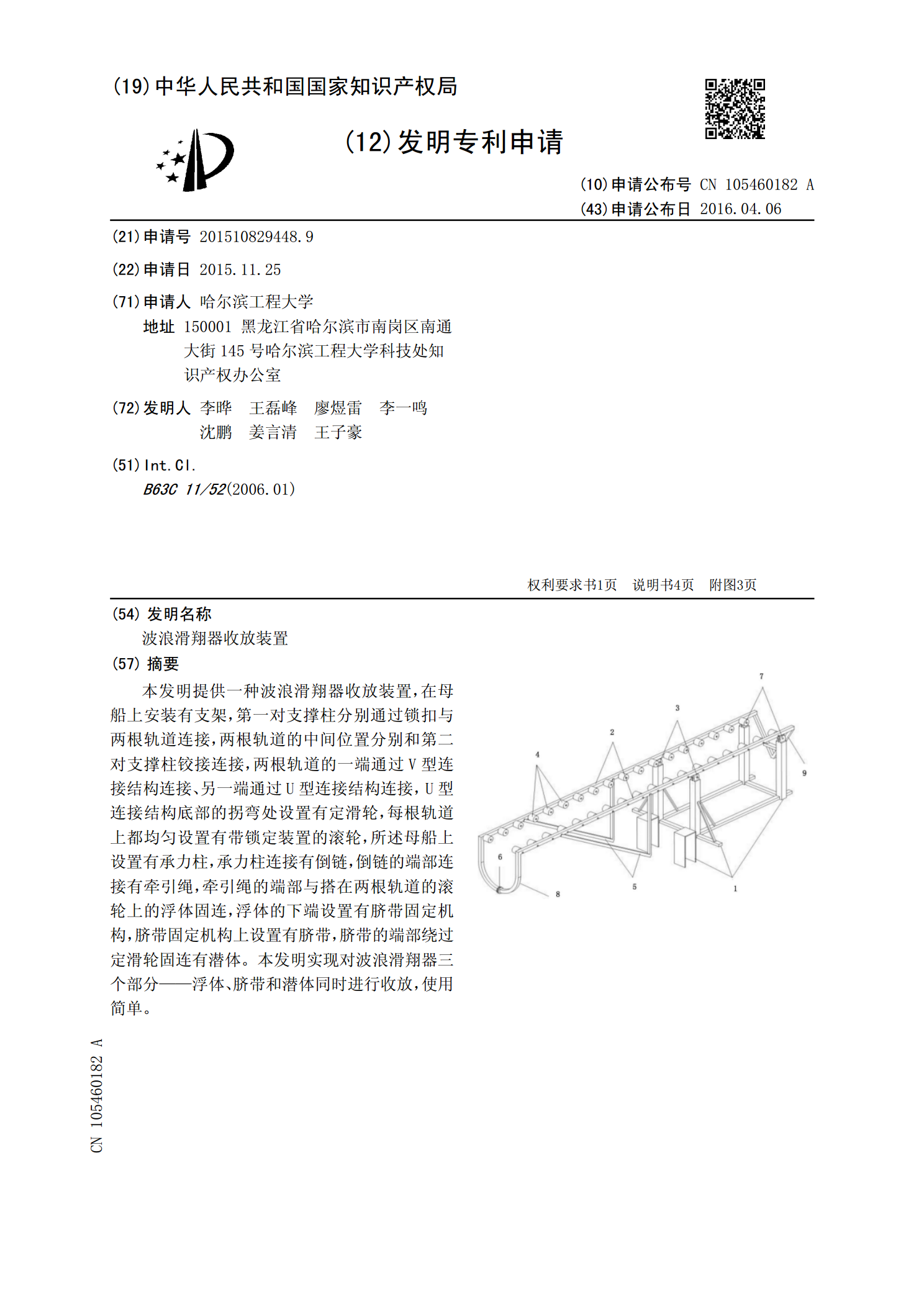
本发明提供一种波浪滑翔器收放装置,在母船上安装有支架,第一对支撑柱分别通过锁扣与两根轨道连接,两根轨道的中间位置分别和第二对支撑柱铰接连接,两根轨道的一端通过V型连接结构连接、另一端通过U型连接结构连接,U型连接结构底部的拐弯处设置有定滑轮,每根轨道上都均匀设置有带锁定装置的滚轮,所述母船上设置有承力柱,承力柱连接有倒链,倒链的端部连接有牵引绳,牵引绳的端部与搭在两根轨道的滚轮上的浮体固连,浮体的下端设置有脐带固定机构,脐带固定机构上设置有脐带,脐带的端部绕过定滑轮固连有潜体。本发明实现对波浪滑翔器三个部

一种长续航仿鱼尾波浪滑翔器.pdf
本发明涉及一种长续航仿鱼尾波浪滑翔器,包括水面随动装置和尾部行进装置,尾部行进装置包括水面行进机构和水下行进机构,水面行进机构包括尾翼框架、及在尾翼框架上转动连接的若干第一柔性尾翼,尾翼框架一侧设有水面传动杆,水下行进机构包括水下传动杆、及在水下传动杆上转动连接的第二柔性尾翼,水下传动杆与水面传动杆平行设置,且端部之间设有垂直设置的连杆,水下传动杆和水面传动杆上均设有垂直设置的套筒,套筒内设有与套筒相对旋转的支撑架;本发明节能绿色环保,采用水面行进机构和水下行进机构共同作用,无需自带能源,以完全利用海洋能