
一种车辆紧急制动方法、系统以及车辆.pdf

猫巷****雪凝

1/10

2/10
3/10

4/10
5/10
6/10

7/10

8/10

9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种车辆紧急制动方法、系统以及车辆.pdf
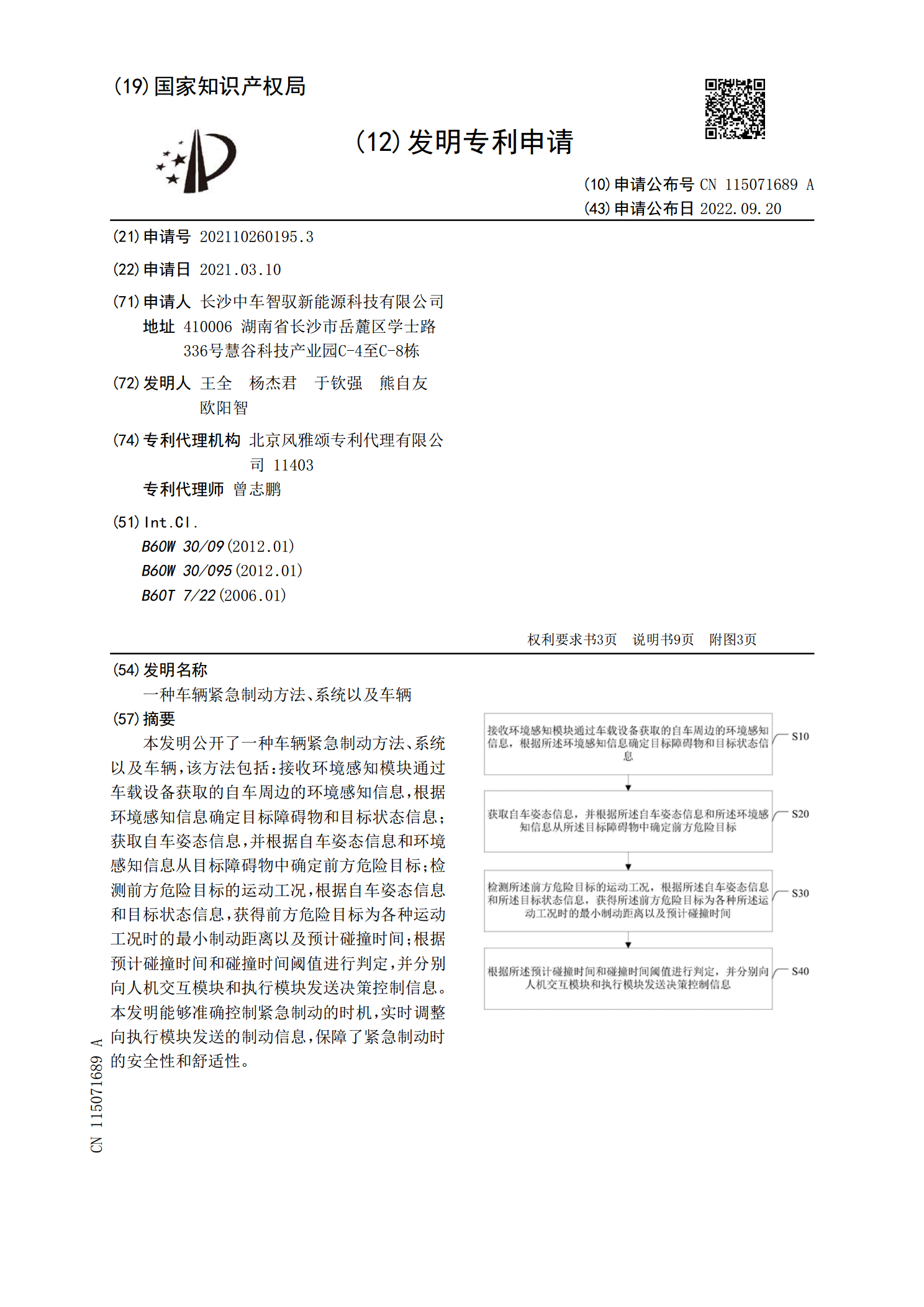
本发明公开了一种车辆紧急制动方法、系统以及车辆,该方法包括:接收环境感知模块通过车载设备获取的自车周边的环境感知信息,根据环境感知信息确定目标障碍物和目标状态信息;获取自车姿态信息,并根据自车姿态信息和环境感知信息从目标障碍物中确定前方危险目标;检测前方危险目标的运动工况,根据自车姿态信息和目标状态信息,获得前方危险目标为各种运动工况时的最小制动距离以及预计碰撞时间;根据预计碰撞时间和碰撞时间阈值进行判定,并分别向人机交互模块和执行模块发送决策控制信息。本发明能够准确控制紧急制动的时机,实时调整向执行模块
一种车辆控制系统、车辆控制方法以及车辆.pdf
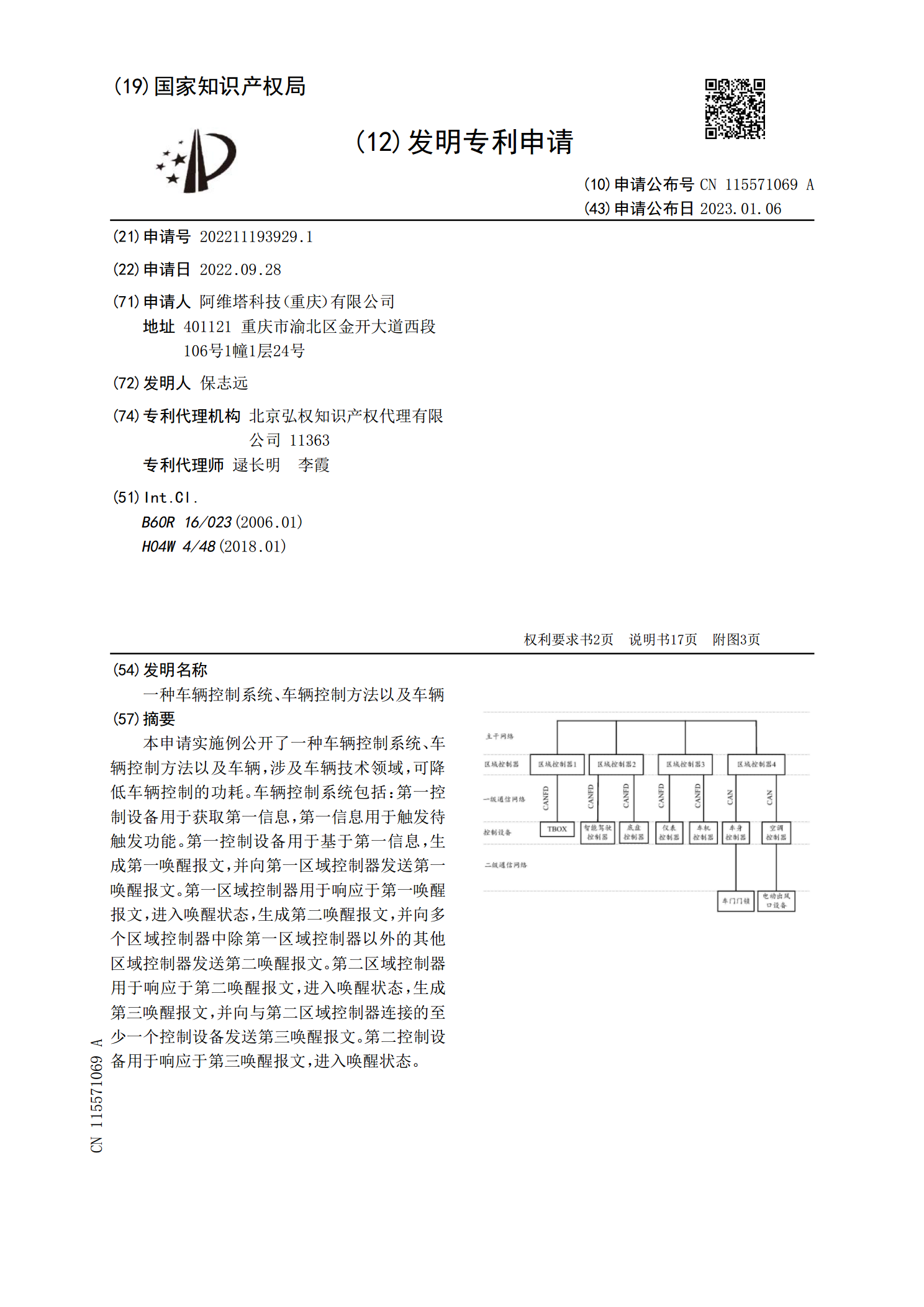
本申请实施例公开了一种车辆控制系统、车辆控制方法以及车辆,涉及车辆技术领域,可降低车辆控制的功耗。车辆控制系统包括:第一控制设备用于获取第一信息,第一信息用于触发待触发功能。第一控制设备用于基于第一信息,生成第一唤醒报文,并向第一区域控制器发送第一唤醒报文。第一区域控制器用于响应于第一唤醒报文,进入唤醒状态,生成第二唤醒报文,并向多个区域控制器中除第一区域控制器以外的其他区域控制器发送第二唤醒报文。第二区域控制器用于响应于第二唤醒报文,进入唤醒状态,生成第三唤醒报文,并向与第二区域控制器连接的至少一个控制

一种车辆紧急制动控制方法及系统.pdf
本发明公开一种车辆紧急制动控制方法及系统,该方法包括以下步骤:获取当前车辆的状态信息,包括车辆的横摆角速度、车速、各车轮的角速度和制动压力;判断当前车辆的运行状态,若当前车辆处于紧急制动状况,则计算当前状态下车辆各车轮的滑移率,并设定三级制动控制约束条件;基于设定的三级制动控制约束条件,利用车辆各车轮的滑移率调整车辆低附侧和高附侧各车轮的制动压力。本发明提高了车辆运行稳定性,提高了制动效能,保证行车的安全性。

一种车辆紧急制动方法.pdf
一种车辆紧急制动方法,涉及新能源汽车领域,解决现有驾驶车辆过程中,在视野盲区出现障碍物时无法及时收到提示信息,造成人员及车辆伤害等问题,VCU接收到PAS发送的障碍物距离较近后,VCU向MCU发送请求0扭矩的信号,同时向ESC和IC发送误启动制动请求激活信号;ESC执行误启动请求驻车预夹紧并反馈状态,车速降到零之前踩加速踏板不会输出扭矩;在车速降到零之后,前方障碍物仍在碰撞风险范围之内,用户仍有意强制行进,VCU强制限速到3km/h以下,VCU向ESC发送取消误启动请求激活指令,ESC不会执行误启动,VC

车辆的控制方法以及车辆系统.pdf
本发明提供车辆的控制方法以及车辆系统,即便在对由原动机驱动后轮的车辆进行控制的情况下,也能够提高车辆对于转向操作的响应性或者线性感。车辆(1)的控制方法对由原动机(4、20)驱动后轮(2)的车辆进行控制,其中,具有:基本扭矩设定工序,基于车辆的运转状态,设定原动机应当产生的基本扭矩;降低扭矩设定工序,基于搭载于车辆的转向装置(26)的转向角的减少,以使基本扭矩降低的方式设定降低扭矩;以及扭矩产生工序,将原动机控制为产生基于降低扭矩使基本扭矩降低后的扭矩。