
一种拍摄位置确定方法、装置、设备及介质.pdf

一只****呀盟


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种拍摄位置确定方法、装置、设备及介质.pdf
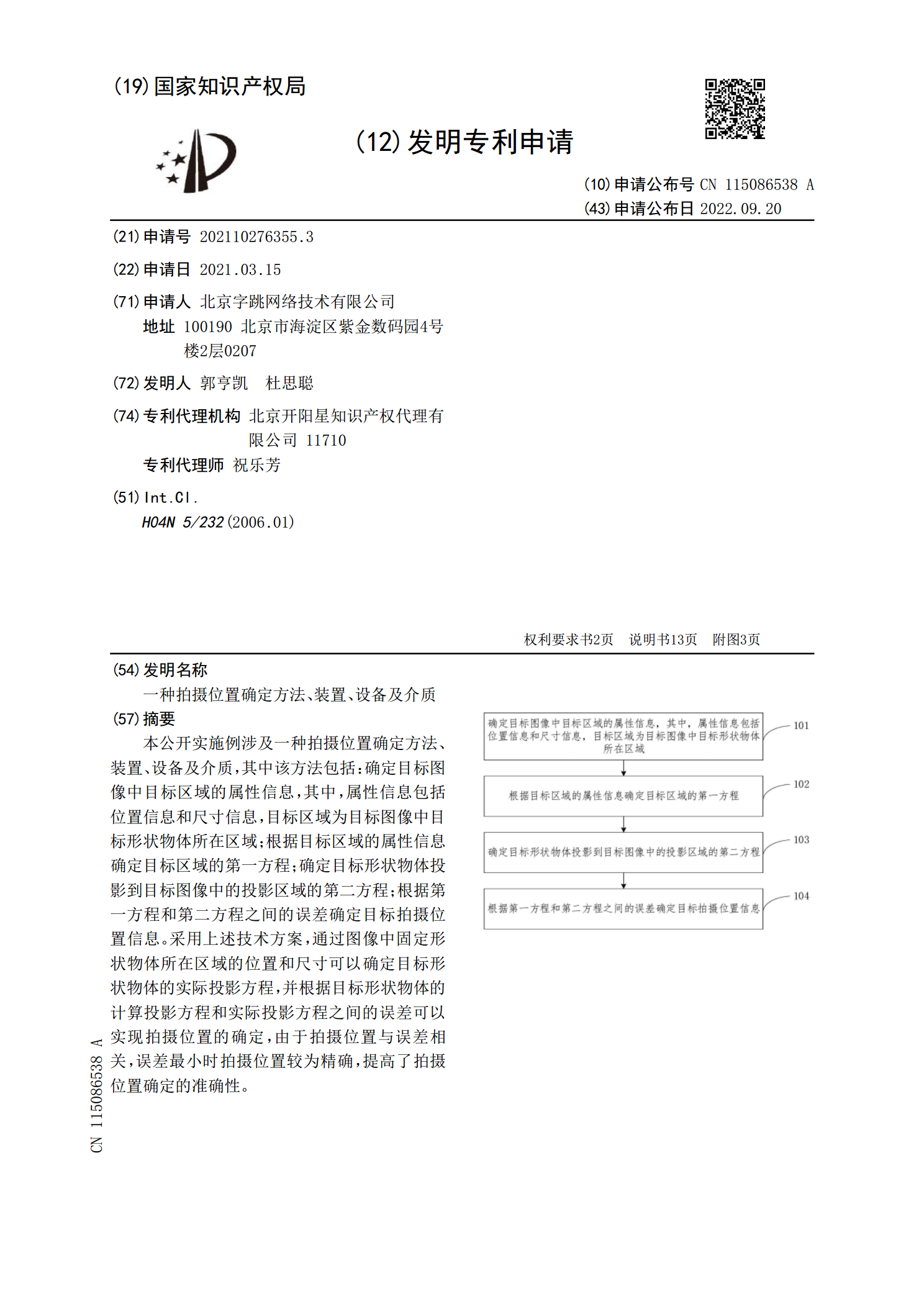
本公开实施例涉及一种拍摄位置确定方法、装置、设备及介质,其中该方法包括:确定目标图像中目标区域的属性信息,其中,属性信息包括位置信息和尺寸信息,目标区域为目标图像中目标形状物体所在区域;根据目标区域的属性信息确定目标区域的第一方程;确定目标形状物体投影到目标图像中的投影区域的第二方程;根据第一方程和第二方程之间的误差确定目标拍摄位置信息。采用上述技术方案,通过图像中固定形状物体所在区域的位置和尺寸可以确定目标形状物体的实际投影方程,并根据目标形状物体的计算投影方程和实际投影方程之间的误差可以实现拍摄位置的

一种拍摄参数的确定方法、装置、设备及介质.pdf
本发明公开了一种拍摄参数的确定方法、装置、设备及介质,用以解决机器人的图像采集设备在暗光下采集图像数据亮度不足的问题。所述拍摄参数的确定方法,包括:对图像采集设备的同一拍摄参数进行多次调节,并在每次调节拍摄参数后采集至少一帧图像数据,得到多帧图像数据;利用预先确定的识别算法,对每帧图像数据中包含的目标对象进行识别,得到每帧图像数据对应的识别率,所述识别率用于确定调节所述图像采集设备中所述拍摄参数时的边界值。

一种确定显示位置的方法、装置、设备及介质.pdf
本发明公开了一种确定显示位置的方法、装置、设备及介质,用以准确的确定输入的内容的显示位置。由于本发明实施例可以在接收到鼠标移动事件的鼠标停留位置位于第一网页窗口中时,确定第一网页窗口的第一标识信息,并判断该第一标识信息与上一次发生鼠标点击事件的鼠标点击位置所在的第二网页窗口的第二标识信息是否相同,在即使第一标识信息与第二标识信息不同时,也可以基于确定的焦点的位置,在第二网页窗口中显示输入的内容,以实现可以仍在鼠标点击位置所在的第二网页窗口中显示用户等输入的内容,不因发生的鼠标移动事件而影响输入的内容的显示
一种位置确定方法、装置、家电设备及存储介质.pdf
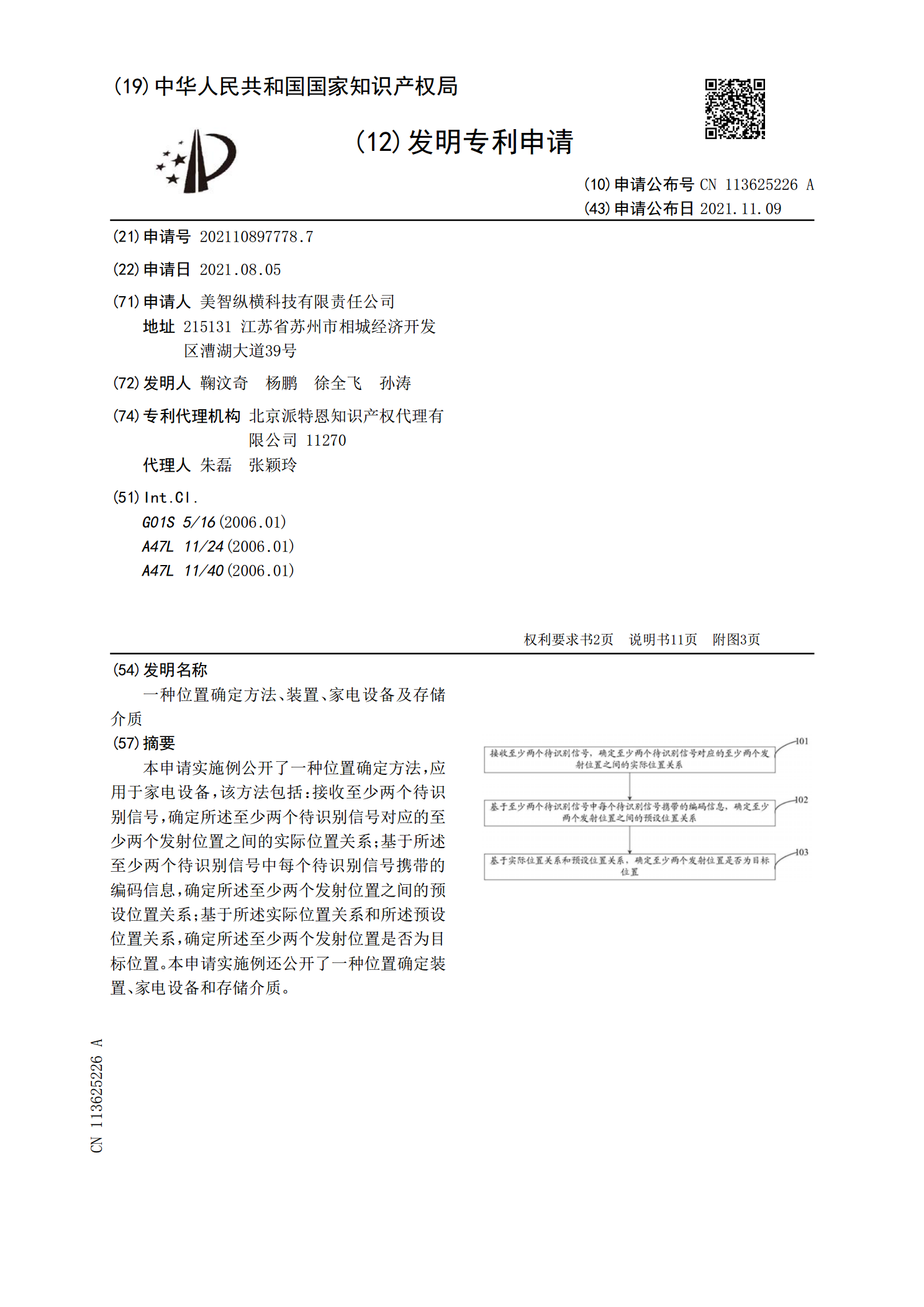
本申请实施例公开了一种位置确定方法,应用于家电设备,该方法包括:接收至少两个待识别信号,确定所述至少两个待识别信号对应的至少两个发射位置之间的实际位置关系;基于所述至少两个待识别信号中每个待识别信号携带的编码信息,确定所述至少两个发射位置之间的预设位置关系;基于所述实际位置关系和所述预设位置关系,确定所述至少两个发射位置是否为目标位置。本申请实施例还公开了一种位置确定装置、家电设备和存储介质。

一种确定物品装载位置的方法、装置、设备及存储介质.pdf
本申请实施例提供了一种确定物品装载位置的方法、装置、设备及存储介质,涉及数据处理技术领域,该方法包括:基于M个物品的属性信息,确定M个物品对应的装载顺序。先针对装载顺序的第一位对应的第一物品,以第一物品放入装载容器后,装载容器的主剩余空间达到最大值为基准,确定第一物品在装载容器中的第一装载位置。再针对第一物品之外的M?1个第二物品,分别执行以下步骤:基于一个第二物品对应的多个第二候选装载位置的推荐系数,确定该第二物品在装载容器中的第二装载位置。通过保证装载容器的主剩余空间达到最大值,确定第一物品对应的第一