
合页角度的检测方法及相关设备.pdf

瀚玥****魔王


1/10

2/10
3/10
4/10
5/10
6/10

7/10

8/10

9/10
10/10
亲,该文档总共35页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
合页角度的检测方法及相关设备.pdf
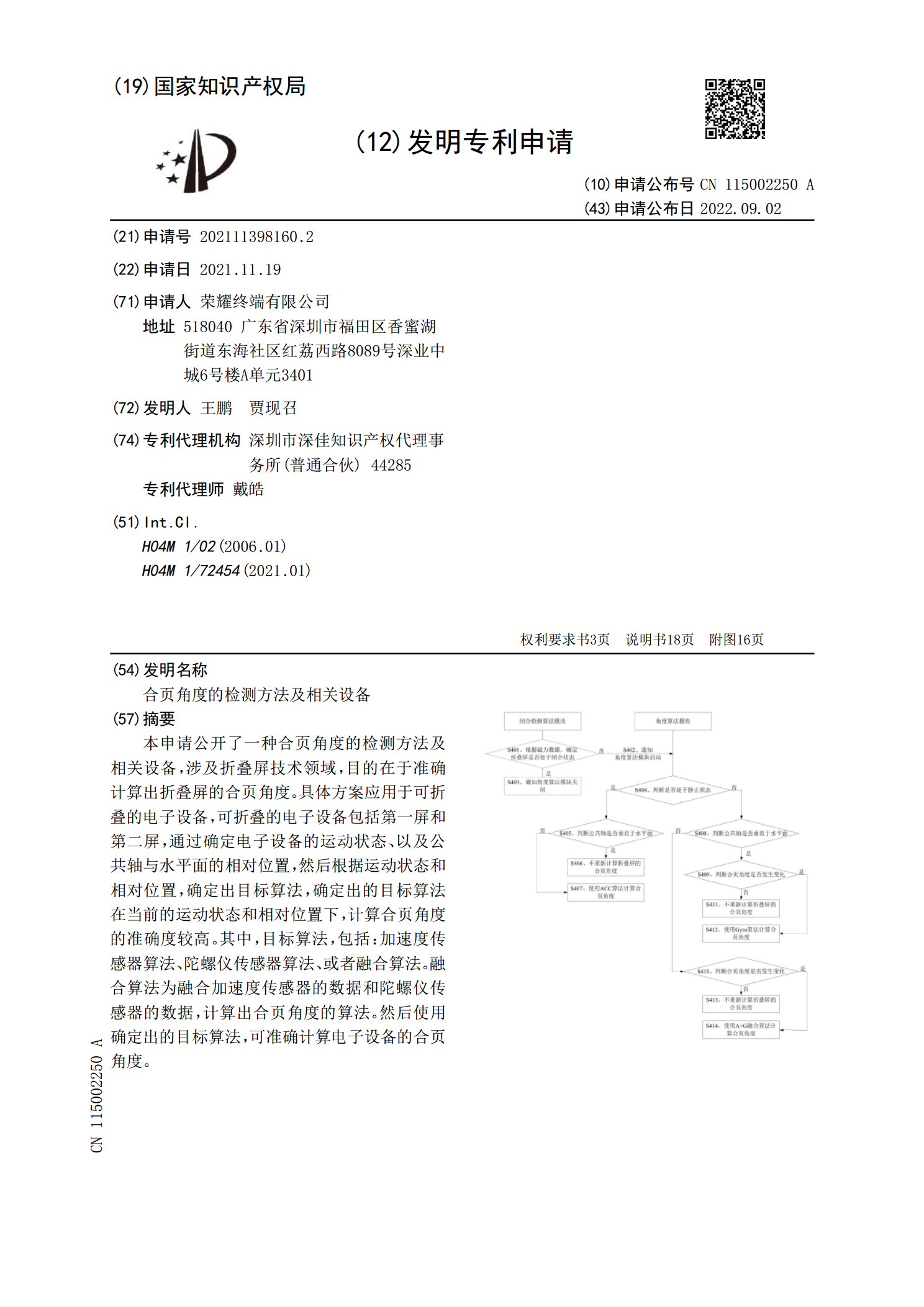
本申请公开了一种合页角度的检测方法及相关设备,涉及折叠屏技术领域,目的在于准确计算出折叠屏的合页角度。具体方案应用于可折叠的电子设备,可折叠的电子设备包括第一屏和第二屏,通过确定电子设备的运动状态、以及公共轴与水平面的相对位置,然后根据运动状态和相对位置,确定出目标算法,确定出的目标算法在当前的运动状态和相对位置下,计算合页角度的准确度较高。其中,目标算法,包括:加速度传感器算法、陀螺仪传感器算法、或者融合算法。融合算法为融合加速度传感器的数据和陀螺仪传感器的数据,计算出合页角度的算法。然后使用确定出的目
合页角度的检测方法及相关设备.pdf
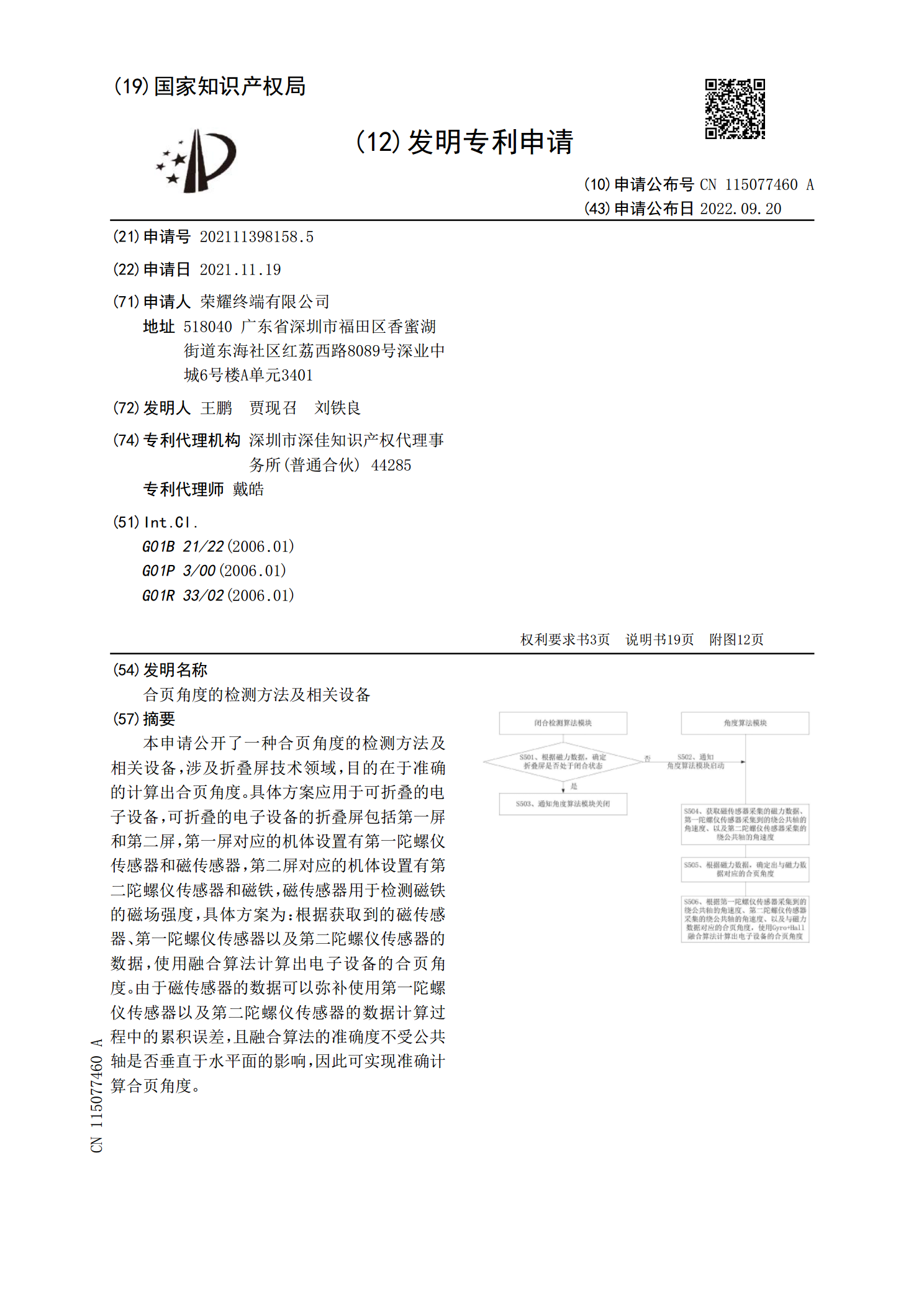
本申请公开了一种合页角度的检测方法及相关设备,涉及折叠屏技术领域,目的在于准确的计算出合页角度。具体方案应用于可折叠的电子设备,可折叠的电子设备的折叠屏包括第一屏和第二屏,第一屏对应的机体设置有第一陀螺仪传感器和磁传感器,第二屏对应的机体设置有第二陀螺仪传感器和磁铁,磁传感器用于检测磁铁的磁场强度,具体方案为:根据获取到的磁传感器、第一陀螺仪传感器以及第二陀螺仪传感器的数据,使用融合算法计算出电子设备的合页角度。由于磁传感器的数据可以弥补使用第一陀螺仪传感器以及第二陀螺仪传感器的数据计算过程中的累积误差,
弯刀角度检测装置、弯刀设备及角度检测方法.pdf
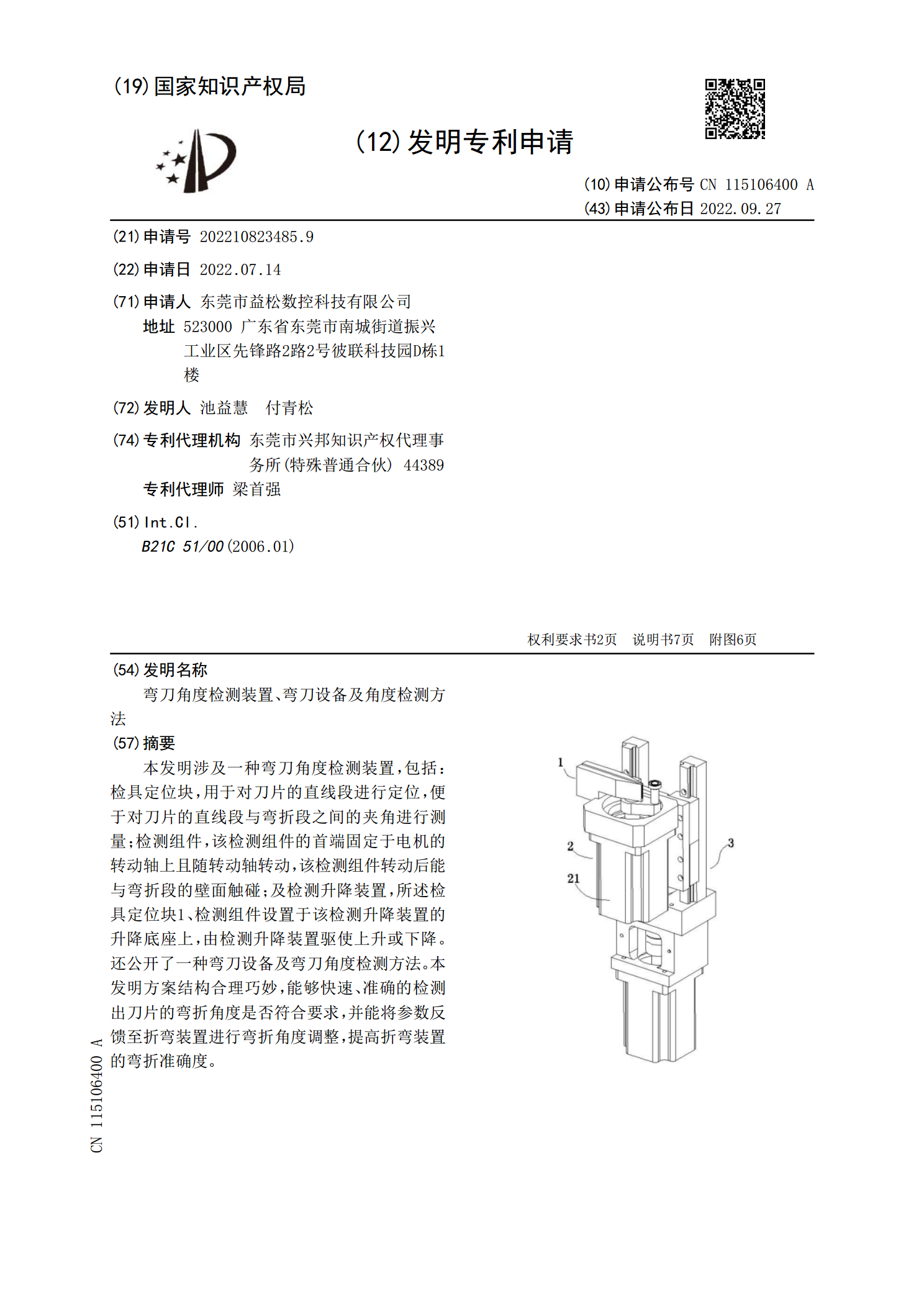
本发明涉及一种弯刀角度检测装置,包括:检具定位块,用于对刀片的直线段进行定位,便于对刀片的直线段与弯折段之间的夹角进行测量;检测组件,该检测组件的首端固定于电机的转动轴上且随转动轴转动,该检测组件转动后能与弯折段的壁面触碰;及检测升降装置,所述检具定位块1、检测组件设置于该检测升降装置的升降底座上,由检测升降装置驱使上升或下降。还公开了一种弯刀设备及弯刀角度检测方法。本发明方案结构合理巧妙,能够快速、准确的检测出刀片的弯折角度是否符合要求,并能将参数反馈至折弯装置进行弯折角度调整,提高折弯装置的弯折准确度
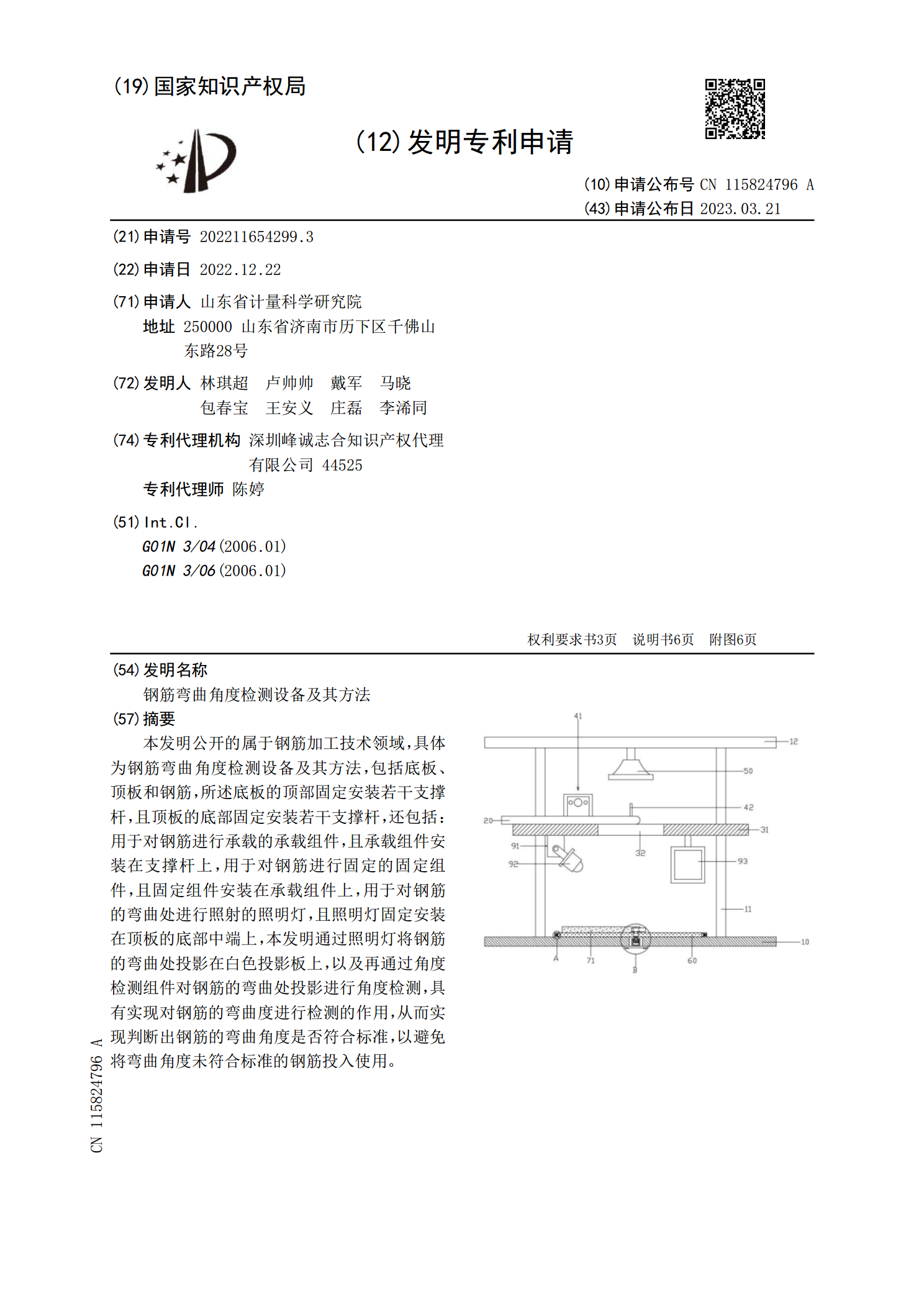
钢筋弯曲角度检测设备及其方法.pdf
本发明公开的属于钢筋加工技术领域,具体为钢筋弯曲角度检测设备及其方法,包括底板、顶板和钢筋,所述底板的顶部固定安装若干支撑杆,且顶板的底部固定安装若干支撑杆,还包括:用于对钢筋进行承载的承载组件,且承载组件安装在支撑杆上,用于对钢筋进行固定的固定组件,且固定组件安装在承载组件上,用于对钢筋的弯曲处进行照射的照明灯,且照明灯固定安装在顶板的底部中端上,本发明通过照明灯将钢筋的弯曲处投影在白色投影板上,以及再通过角度检测组件对钢筋的弯曲处投影进行角度检测,具有实现对钢筋的弯曲度进行检测的作用,从而实现判断出钢
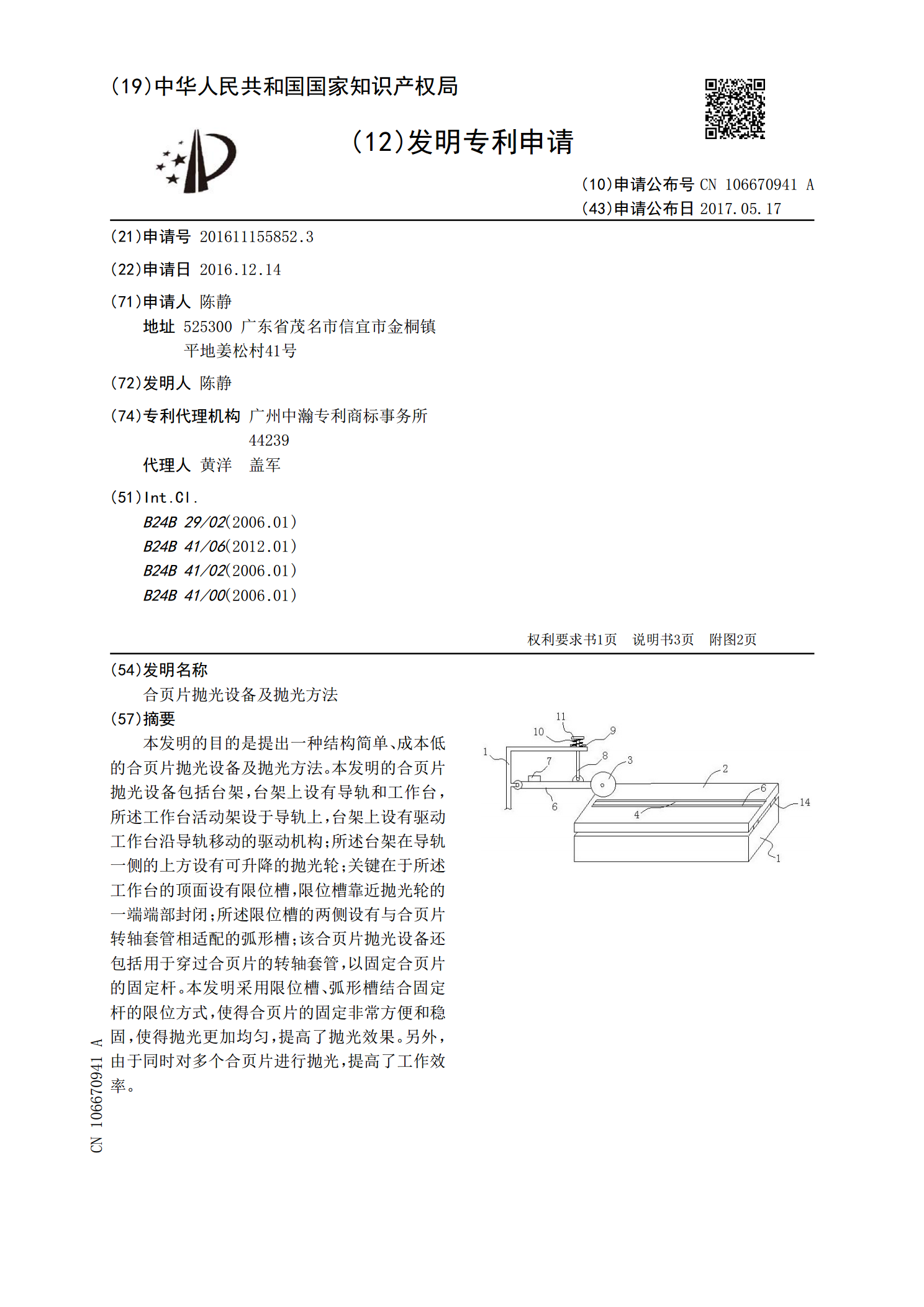
合页片抛光设备及抛光方法.pdf
本发明的目的是提出一种结构简单、成本低的合页片抛光设备及抛光方法。本发明的合页片抛光设备包括台架,台架上设有导轨和工作台,所述工作台活动架设于导轨上,台架上设有驱动工作台沿导轨移动的驱动机构;所述台架在导轨一侧的上方设有可升降的抛光轮;关键在于所述工作台的顶面设有限位槽,限位槽靠近抛光轮的一端端部封闭;所述限位槽的两侧设有与合页片转轴套管相适配的弧形槽;该合页片抛光设备还包括用于穿过合页片的转轴套管,以固定合页片的固定杆。本发明采用限位槽、弧形槽结合固定杆的限位方式,使得合页片的固定非常方便和稳固,使得抛