
多无人机电力巡检智能调度方法和系统.pdf

是雁****找我


1/10

2/10

3/10

4/10

5/10

6/10
7/10

8/10
9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
多无人机电力巡检智能调度方法和系统.pdf
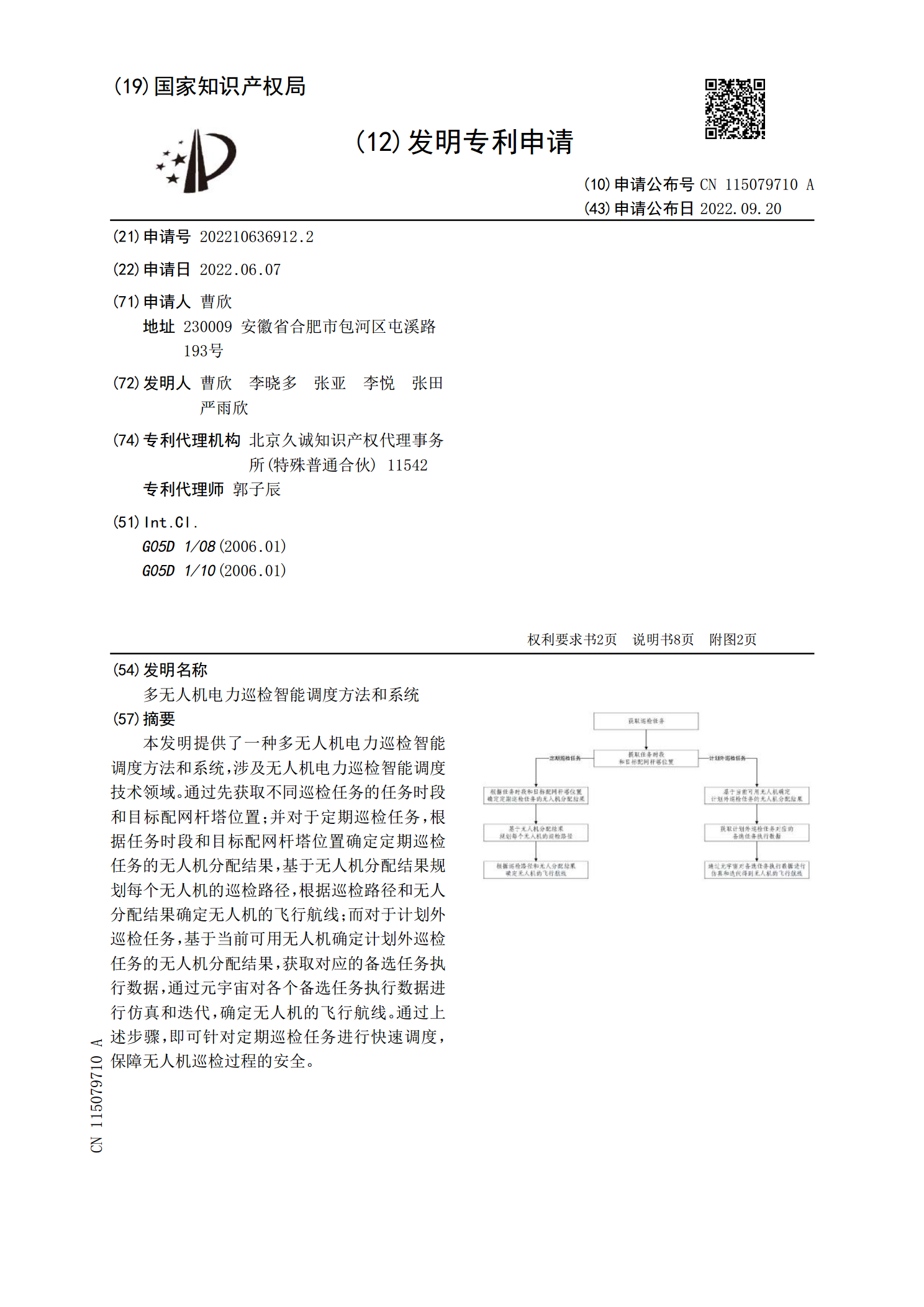
本发明提供了一种多无人机电力巡检智能调度方法和系统,涉及无人机电力巡检智能调度技术领域。通过先获取不同巡检任务的任务时段和目标配网杆塔位置;并对于定期巡检任务,根据任务时段和目标配网杆塔位置确定定期巡检任务的无人机分配结果,基于无人机分配结果规划每个无人机的巡检路径,根据巡检路径和无人分配结果确定无人机的飞行航线;而对于计划外巡检任务,基于当前可用无人机确定计划外巡检任务的无人机分配结果,获取对应的备选任务执行数据,通过元宇宙对各个备选任务执行数据进行仿真和迭代,确定无人机的飞行航线。通过上述步骤,即可针

电力巡检图像缺陷识别方法和系统、电力巡检无人机.pdf
本发明公开了一种电力巡检图像缺陷识别方法,包括:创建并且级联目标检测网络和多个分类网络;获取若干帧巡检图像样本,对巡检图像样本中的目标进行标注,生成训练样本集;采用训练样本集对级联网络进行训练,其中,每一网络层的量化参数与其所在网络层的量化级数和量化的范围相关;采用训练好的级联网络对新获取的巡检图像中的缺陷进行识别。本发明能够针对电网杆塔及架空线路的运维,给出了一种有效的FPGA机载识别系统,相应的量化函数可以确保不同网络层的不同通道均能得到合适的量化,最大限度地保留网络的精度;通过级联目标检测网络和分类
多无人机与车辆协同巡检的路径优化方法和装置.pdf
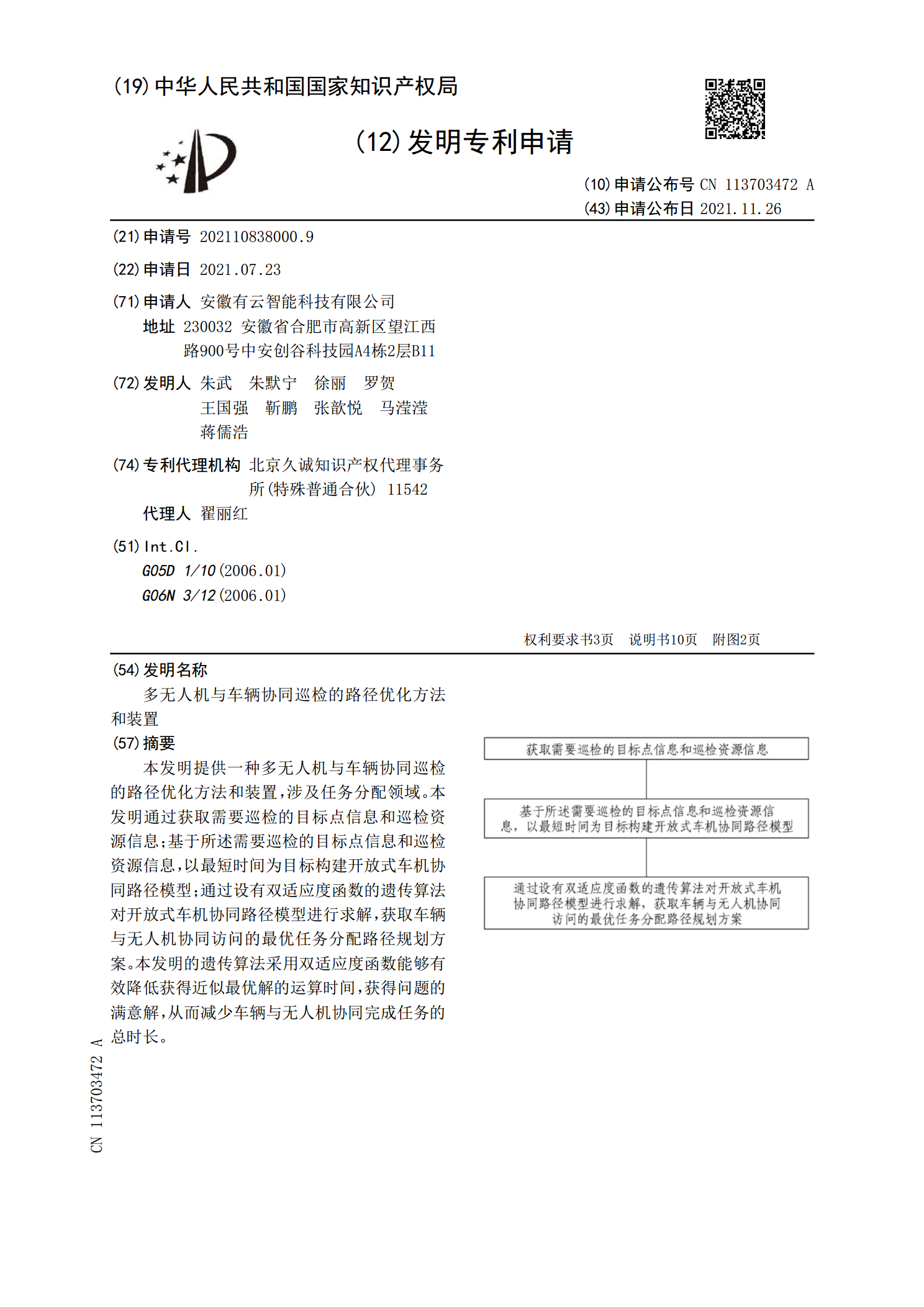
本发明提供一种多无人机与车辆协同巡检的路径优化方法和装置,涉及任务分配领域。本发明通过获取需要巡检的目标点信息和巡检资源信息;基于所述需要巡检的目标点信息和巡检资源信息,以最短时间为目标构建开放式车机协同路径模型;通过设有双适应度函数的遗传算法对开放式车机协同路径模型进行求解,获取车辆与无人机协同访问的最优任务分配路径规划方案。本发明的遗传算法采用双适应度函数能够有效降低获得近似最优解的运算时间,获得问题的满意解,从而减少车辆与无人机协同完成任务的总时长。

电力智能巡检系统.docx
编号:时间:2021年x月x日书山有路勤为径学海无涯苦作舟页码:1.概述电力系统的稳定运行关系着人民生活和生产活动乃至国家和社会的稳定。电力系统的每一次故障都有可能给社会造成无法估量的损失。所以保证电力系统安全运行是输变电部门等电力行业的首要任务。电力设施巡检是有效保证电力系统安全的一项基础工作。巡检的目的是掌握线路运行状况及周围环境的变化发现设施缺陷和危及线路安全的隐患保证线路的安全和电力系统稳定。华微电力智能巡检系统是华微软件在多年的移动技
电力智能巡检系统.docx
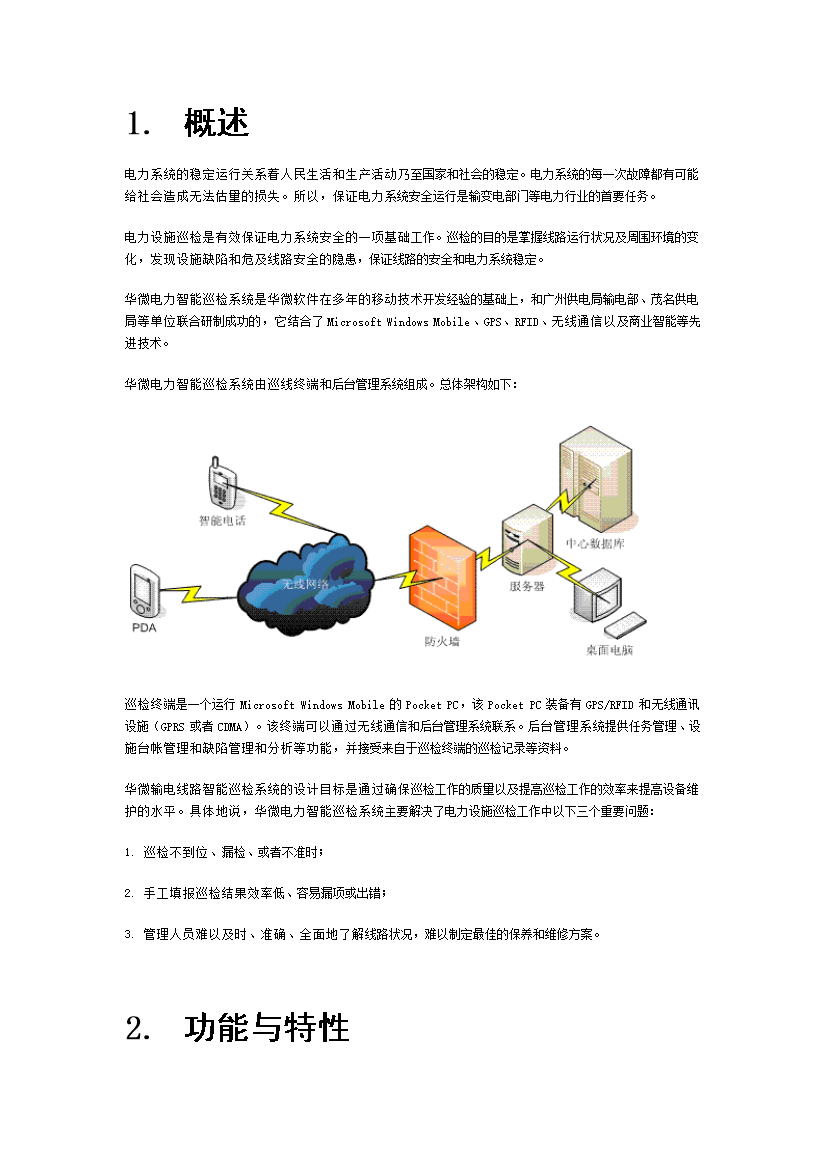
1.概述电力系统的稳定运行关系着人民生活和生产活动乃至国家和社会的稳定。电力系统的每一次故障都有可能给社会造成无法估量的损失。所以保证电力系统安全运行是输变电部门等电力行业的首要任务。电力设施巡检是有效保证电力系统安全的一项基础工作。巡检的目的是掌握线路运行状况及周围环境的变化发现设施缺陷和危及线路安全的隐患保证线路的安全和电力系统稳定。华微电力智能巡检系统是华微软件在多年的移动技术开发经验的基础上和广州供电局输电部、茂名供电局等单位联合研制成功的它结合了MicrosoftWindow