
一种基于单目摄像机的面向小目标手部隔空交互方法与装置.pdf

淑然****by


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于单目摄像机的面向小目标手部隔空交互方法与装置.pdf
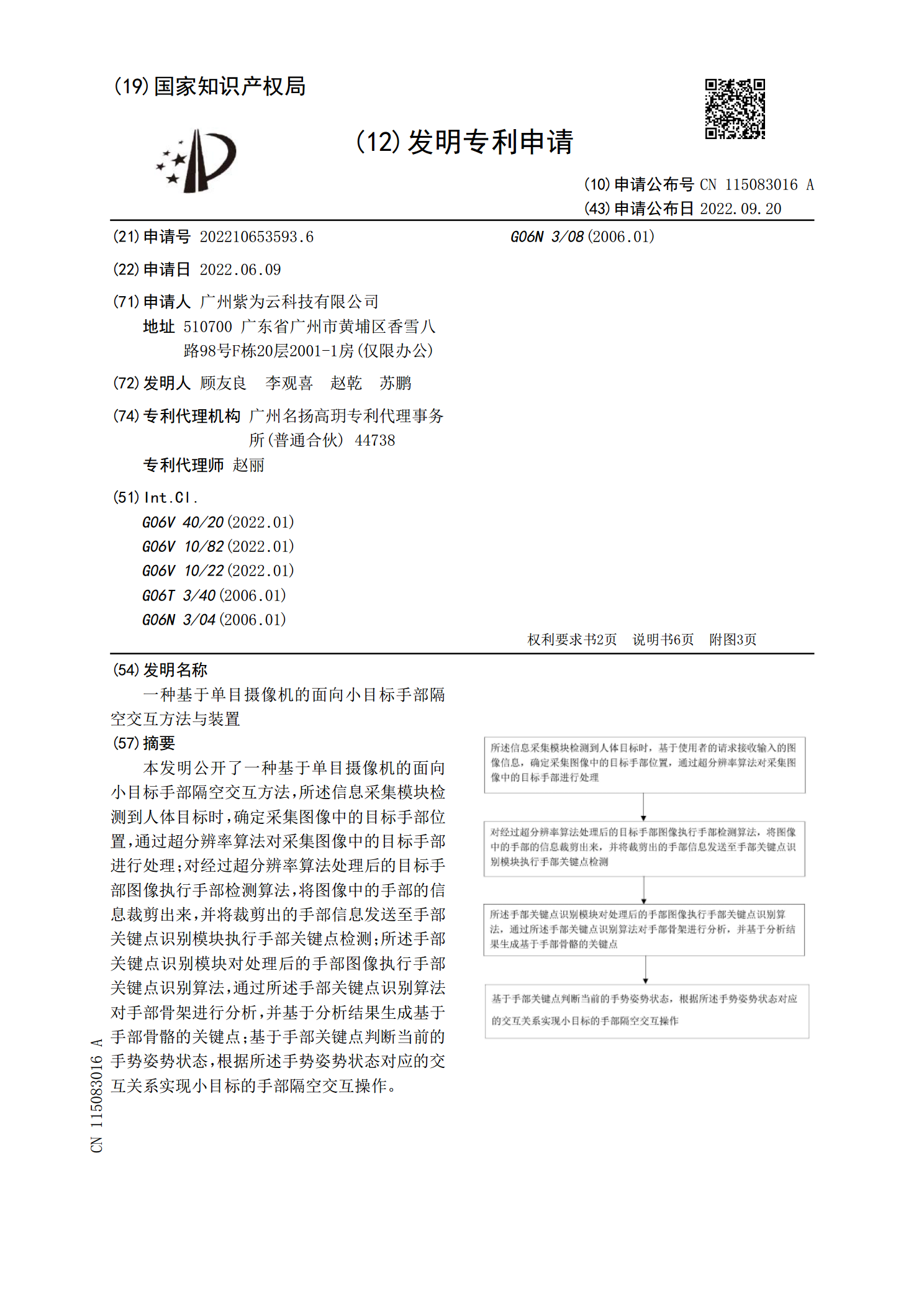
本发明公开了一种基于单目摄像机的面向小目标手部隔空交互方法,所述信息采集模块检测到人体目标时,确定采集图像中的目标手部位置,通过超分辨率算法对采集图像中的目标手部进行处理;对经过超分辨率算法处理后的目标手部图像执行手部检测算法,将图像中的手部的信息裁剪出来,并将裁剪出的手部信息发送至手部关键点识别模块执行手部关键点检测;所述手部关键点识别模块对处理后的手部图像执行手部关键点识别算法,通过所述手部关键点识别算法对手部骨架进行分析,并基于分析结果生成基于手部骨骼的关键点;基于手部关键点判断当前的手势姿势状态,
一种基于单目摄像机的光照估计方法.pdf
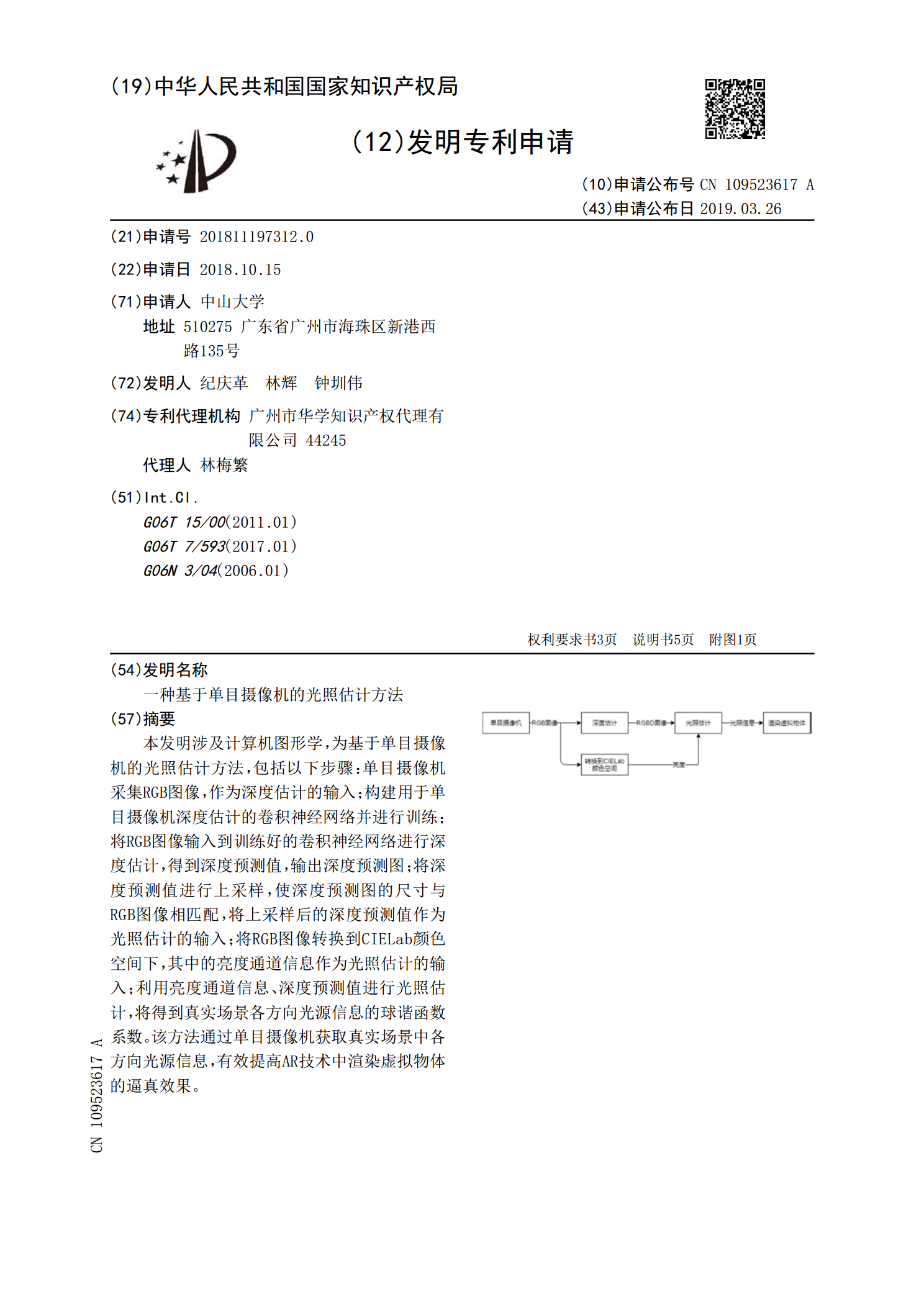
本发明涉及计算机图形学,为基于单目摄像机的光照估计方法,包括以下步骤:单目摄像机采集RGB图像,作为深度估计的输入;构建用于单目摄像机深度估计的卷积神经网络并进行训练;将RGB图像输入到训练好的卷积神经网络进行深度估计,得到深度预测值,输出深度预测图;将深度预测值进行上采样,使深度预测图的尺寸与RGB图像相匹配,将上采样后的深度预测值作为光照估计的输入;将RGB图像转换到CIELab颜色空间下,其中的亮度通道信息作为光照估计的输入;利用亮度通道信息、深度预测值进行光照估计,将得到真实场景各方向光源信息的球
一种基于隔空触摸操作的桌面投影交互方法及系统.pdf
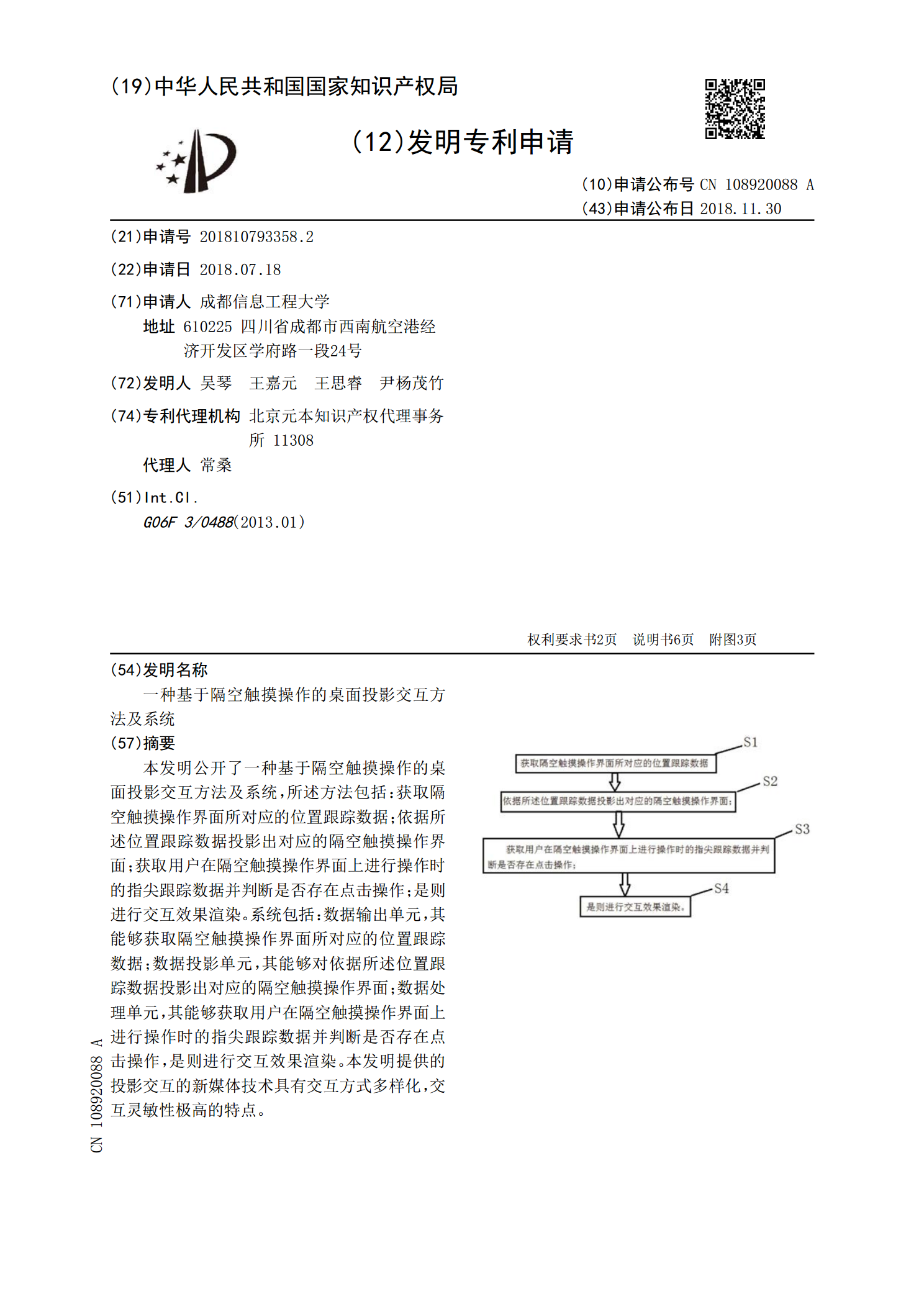
本发明公开了一种基于隔空触摸操作的桌面投影交互方法及系统,所述方法包括:获取隔空触摸操作界面所对应的位置跟踪数据;依据所述位置跟踪数据投影出对应的隔空触摸操作界面;获取用户在隔空触摸操作界面上进行操作时的指尖跟踪数据并判断是否存在点击操作;是则进行交互效果渲染。系统包括:数据输出单元,其能够获取隔空触摸操作界面所对应的位置跟踪数据;数据投影单元,其能够对依据所述位置跟踪数据投影出对应的隔空触摸操作界面;数据处理单元,其能够获取用户在隔空触摸操作界面上进行操作时的指尖跟踪数据并判断是否存在点击操作,是则进行
一种基于车载单目摄像机的行人距离测量方法.pdf
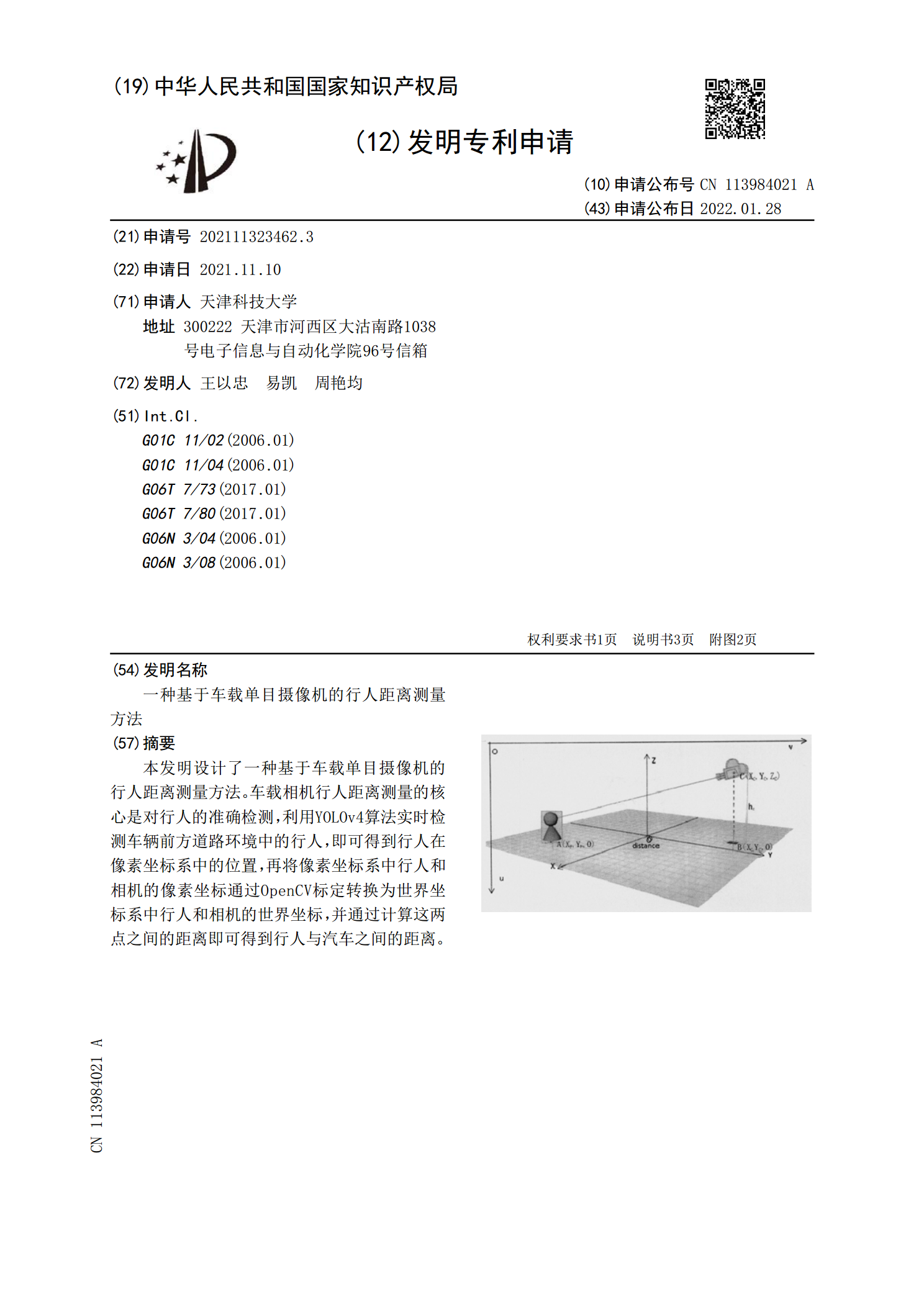
本发明设计了一种基于车载单目摄像机的行人距离测量方法。车载相机行人距离测量的核心是对行人的准确检测,利用YOLOv4算法实时检测车辆前方道路环境中的行人,即可得到行人在像素坐标系中的位置,再将像素坐标系中行人和相机的像素坐标通过OpenCV标定转换为世界坐标系中行人和相机的世界坐标,并通过计算这两点之间的距离即可得到行人与汽车之间的距离。

基于单目手势识别交互系统.doc
本科毕业设计(论文)基于单目手势识别交互系统的设计与实现学院机电工程学院专业数字媒体技术基于单目手势识别交互系统的设计与实现李林钢机电工程学院摘要随着计算机技术的逐渐发展,出现了一些符合人的习惯的人机交互技术。其中,手势的检测和识别技术作为一种有着自然性、简洁性和直接性的一种新型的交互方式,是这些交互技术当中倍受重视的研究和应用的技术之一。近几年来,已经有相当一部分的应用采用了这种手势识别的方式作为跟机器交互的手段,受到了世界各个国家的科研机构和科技企业的重视与青睐。基于计算机视觉的手势识别需要解决一系列