
肌肉骨骼机械臂控制方法和装置.pdf

一吃****仪凡


1/10

2/10

3/10

4/10

5/10

6/10

7/10
8/10

9/10

10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
肌肉骨骼机械臂控制方法和装置.pdf
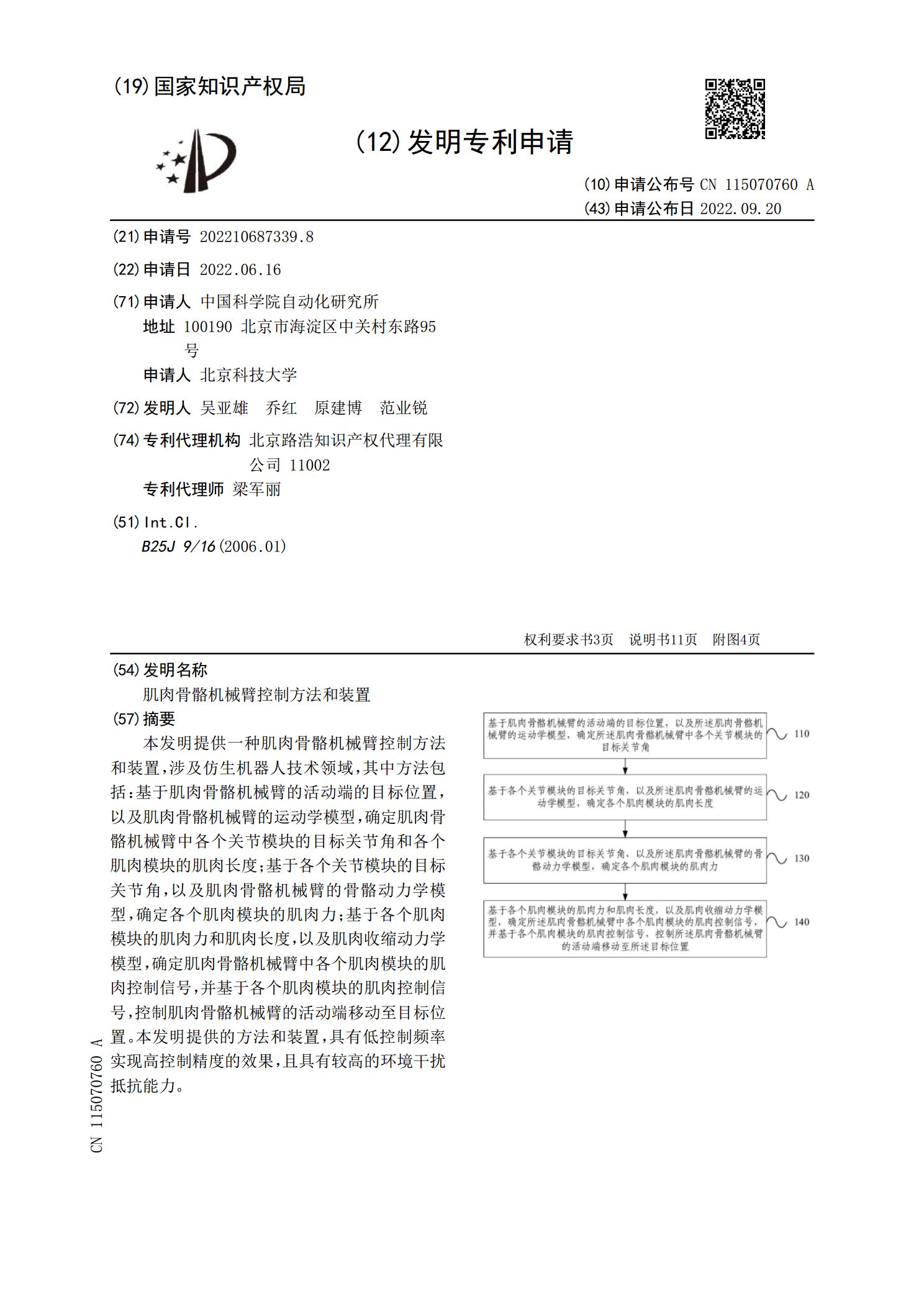
本发明提供一种肌肉骨骼机械臂控制方法和装置,涉及仿生机器人技术领域,其中方法包括:基于肌肉骨骼机械臂的活动端的目标位置,以及肌肉骨骼机械臂的运动学模型,确定肌肉骨骼机械臂中各个关节模块的目标关节角和各个肌肉模块的肌肉长度;基于各个关节模块的目标关节角,以及肌肉骨骼机械臂的骨骼动力学模型,确定各个肌肉模块的肌肉力;基于各个肌肉模块的肌肉力和肌肉长度,以及肌肉收缩动力学模型,确定肌肉骨骼机械臂中各个肌肉模块的肌肉控制信号,并基于各个肌肉模块的肌肉控制信号,控制肌肉骨骼机械臂的活动端移动至目标位置。本发明提供的
肌肉骨骼机器人控制方法及装置.pdf
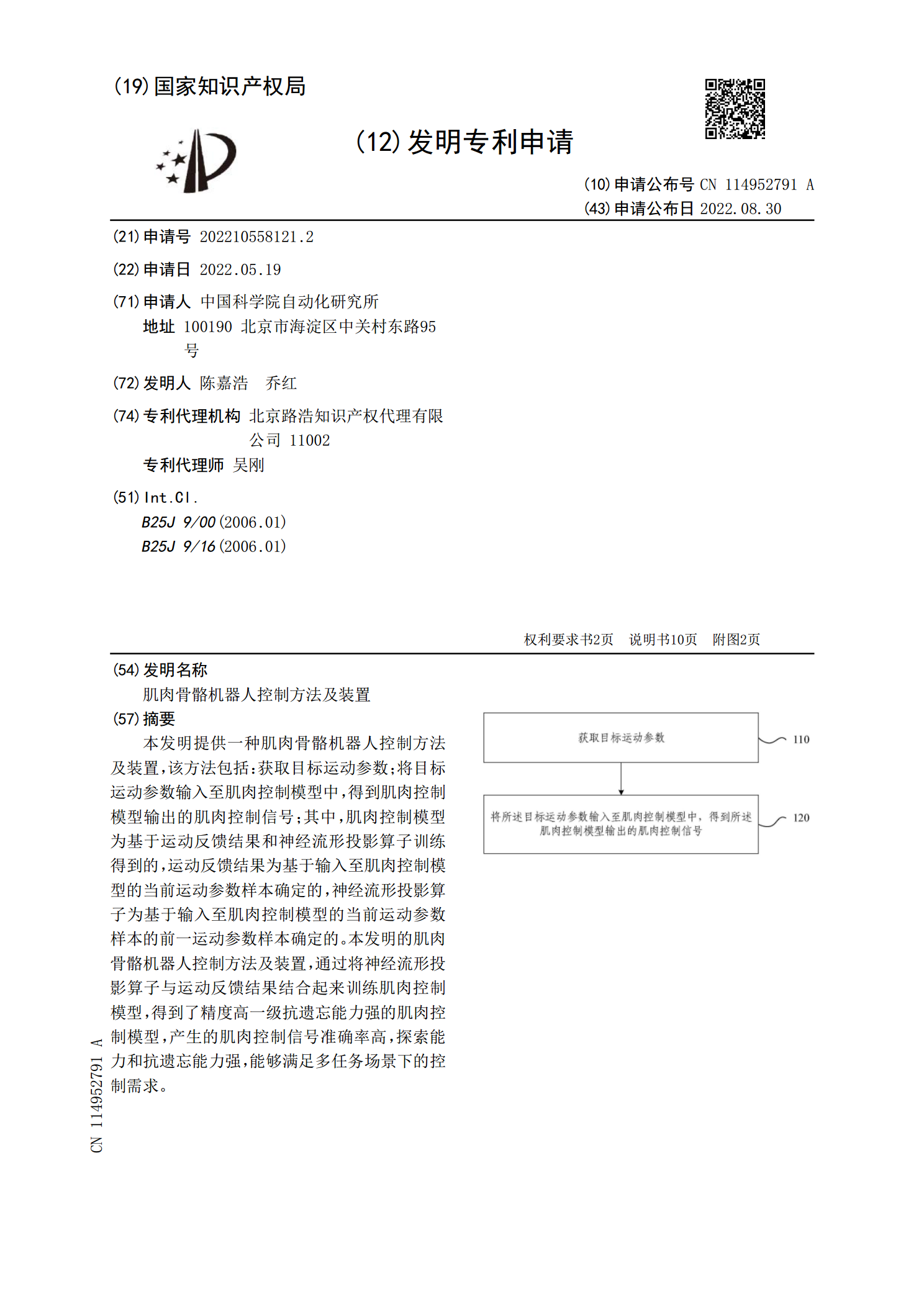
本发明提供一种肌肉骨骼机器人控制方法及装置,该方法包括:获取目标运动参数;将目标运动参数输入至肌肉控制模型中,得到肌肉控制模型输出的肌肉控制信号;其中,肌肉控制模型为基于运动反馈结果和神经流形投影算子训练得到的,运动反馈结果为基于输入至肌肉控制模型的当前运动参数样本确定的,神经流形投影算子为基于输入至肌肉控制模型的当前运动参数样本的前一运动参数样本确定的。本发明的肌肉骨骼机器人控制方法及装置,通过将神经流形投影算子与运动反馈结果结合起来训练肌肉控制模型,得到了精度高一级抗遗忘能力强的肌肉控制模型,产生的肌

机械臂移动控制方法、装置和智能设备.pdf
本申请实施例公开了一种机械臂移动控制方法、装置和智能设备,上述机械臂移动控制方法包括:获取目标物体的图像,所述目标物体的图像为机械臂末端执行机构上设置的视觉传感器采集的;将所述目标物体的图像输入预先训练的神经网络模型,确定所述机械臂末端执行机构相对所述目标物体的方向和在所述方向上所述机械臂末端执行机构相对所述目标物体的距离;根据确定的方向和距离,控制所述机械臂移动。本申请可以实现通过目标物体的图像,获取机械臂末端执行机构相对目标物体的方向和在上述方向上相对目标物体的距离,提高获取的结果的准确率,进而提高控

机械臂控制方法、装置和机器人.pdf
本申请涉及一种机械臂控制方法、装置和机器人,该方法包括:获取机器人在目标环境中的环境感知信息;根据环境感知信息确定机器人当前所属的目标任务场景;获取目标任务场景对应的机械臂控制策略;根据机械臂控制策略,对机器人的机械臂进行控制。其中,不同任务场景对应的机械臂控制策略不同。在该方法中,机器人通过在目标环境中采集的环境感知信息,分析机器人当前所执行任务的目标任务场景。在不同任务场景下采用不同的机械臂控制策略对机械臂进行控制,以保证机械臂在不同任务场景下可以平稳无碰撞作业,提高实际环境中人机交互的安全性。
机械臂控制方法、装置及作业机械.pdf
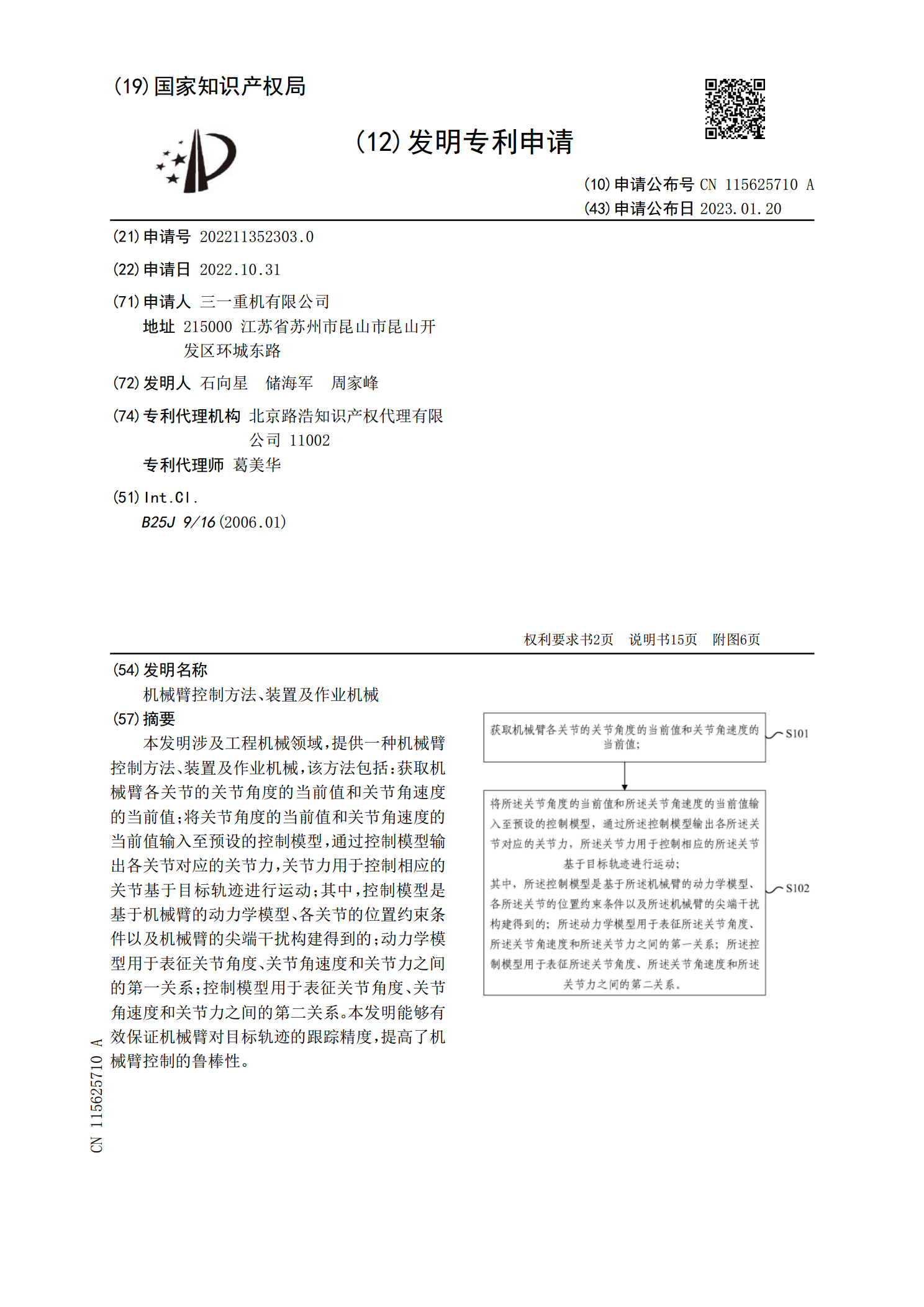
本发明涉及工程机械领域,提供一种机械臂控制方法、装置及作业机械,该方法包括:获取机械臂各关节的关节角度的当前值和关节角速度的当前值;将关节角度的当前值和关节角速度的当前值输入至预设的控制模型,通过控制模型输出各关节对应的关节力,关节力用于控制相应的关节基于目标轨迹进行运动;其中,控制模型是基于机械臂的动力学模型、各关节的位置约束条件以及机械臂的尖端干扰构建得到的;动力学模型用于表征关节角度、关节角速度和关节力之间的第一关系;控制模型用于表征关节角度、关节角速度和关节力之间的第二关系。本发明能够有效保证机械