
一种基于深度学习的实时显式拓扑优化方法.pdf

一只****生物


1/10

2/10
3/10
4/10

5/10
6/10
7/10

8/10

9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于深度学习的实时显式拓扑优化方法.pdf
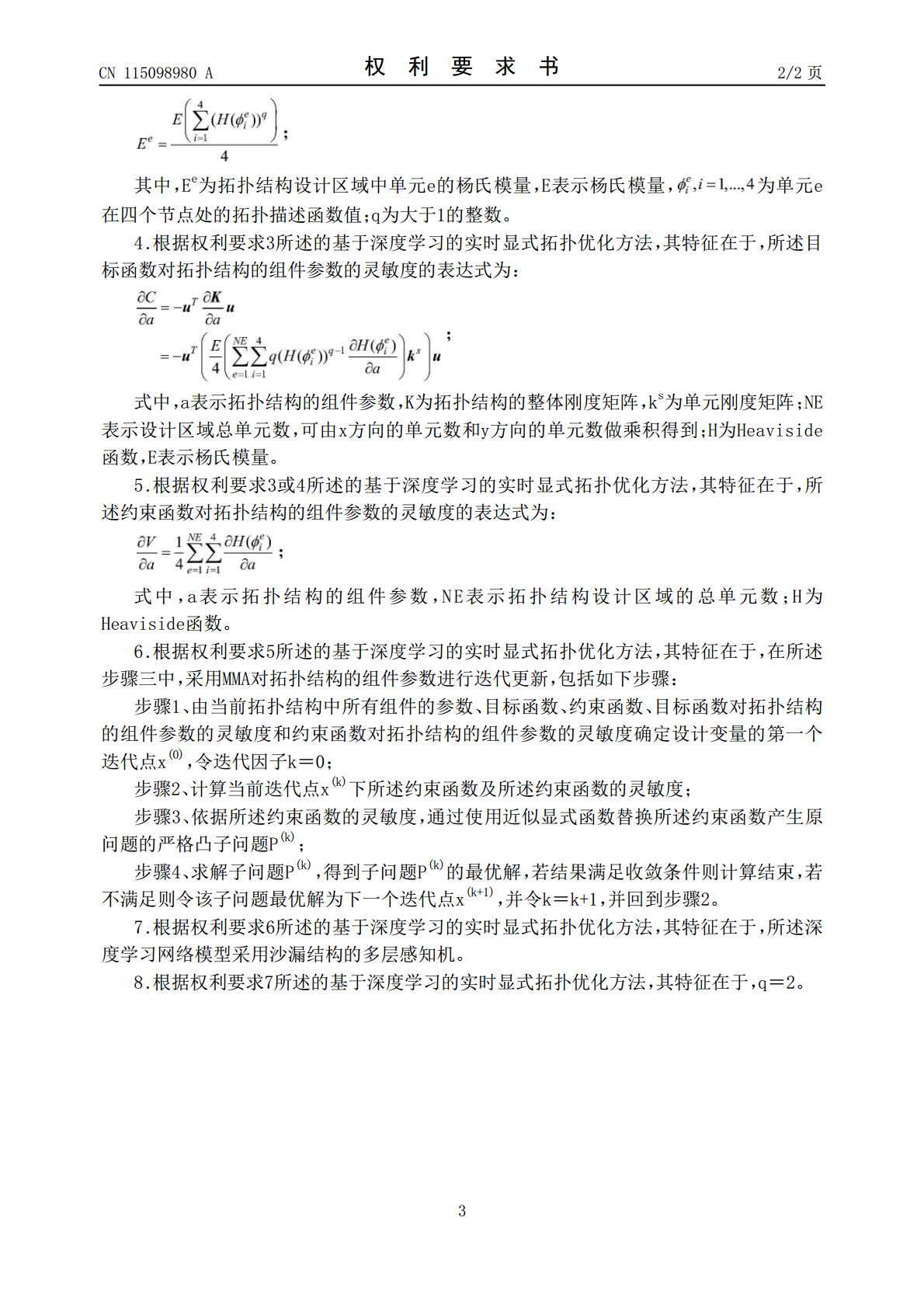
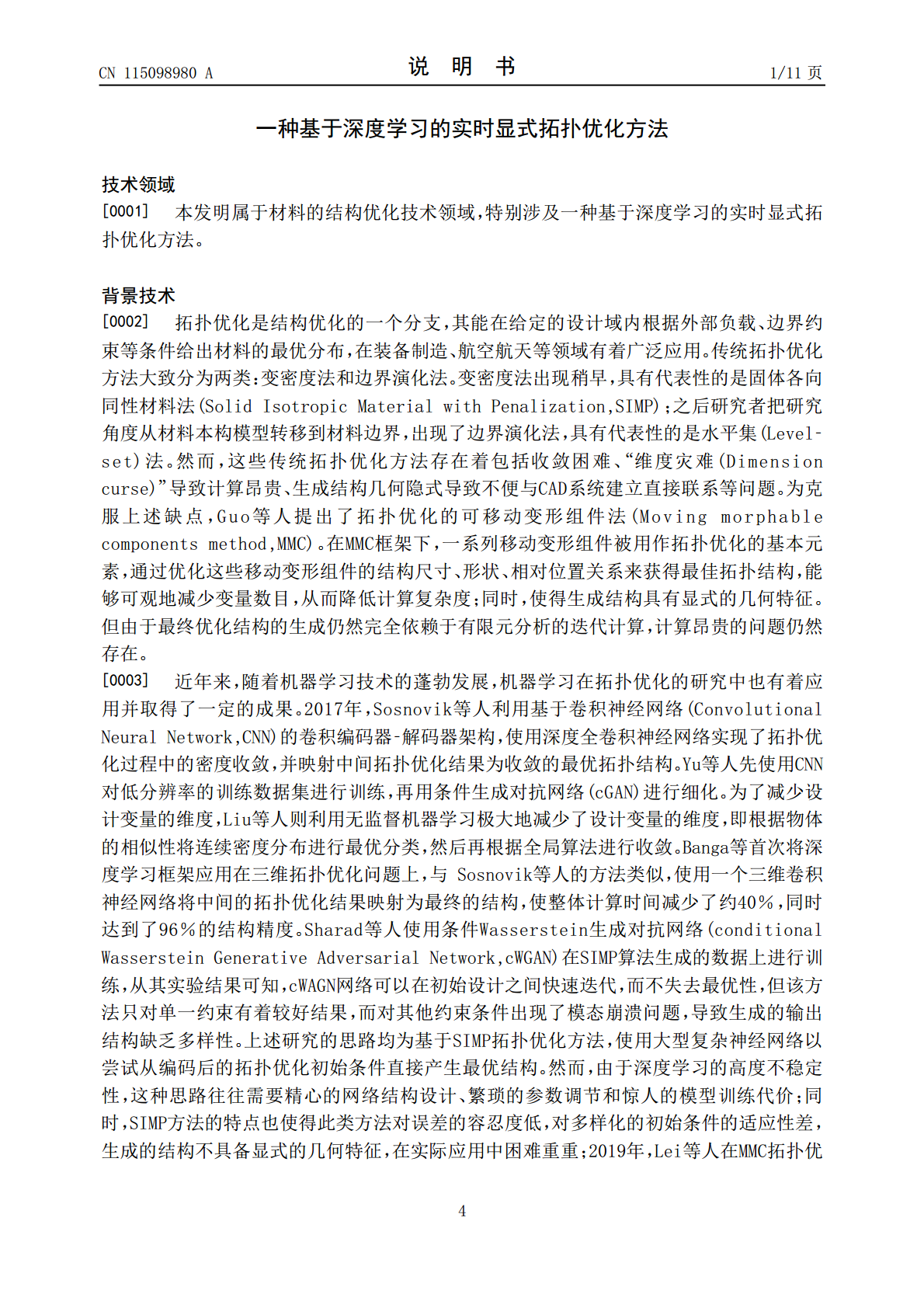
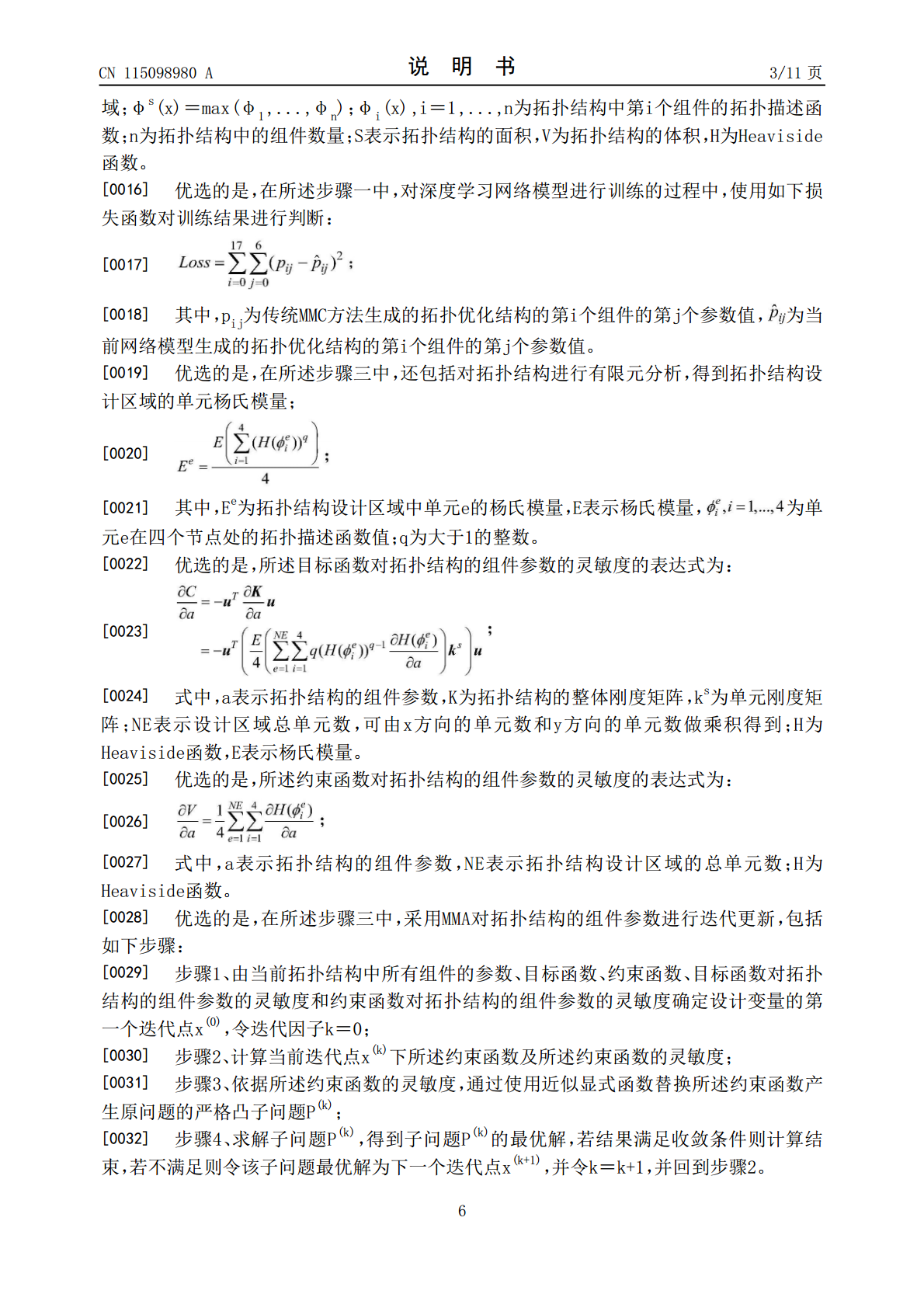
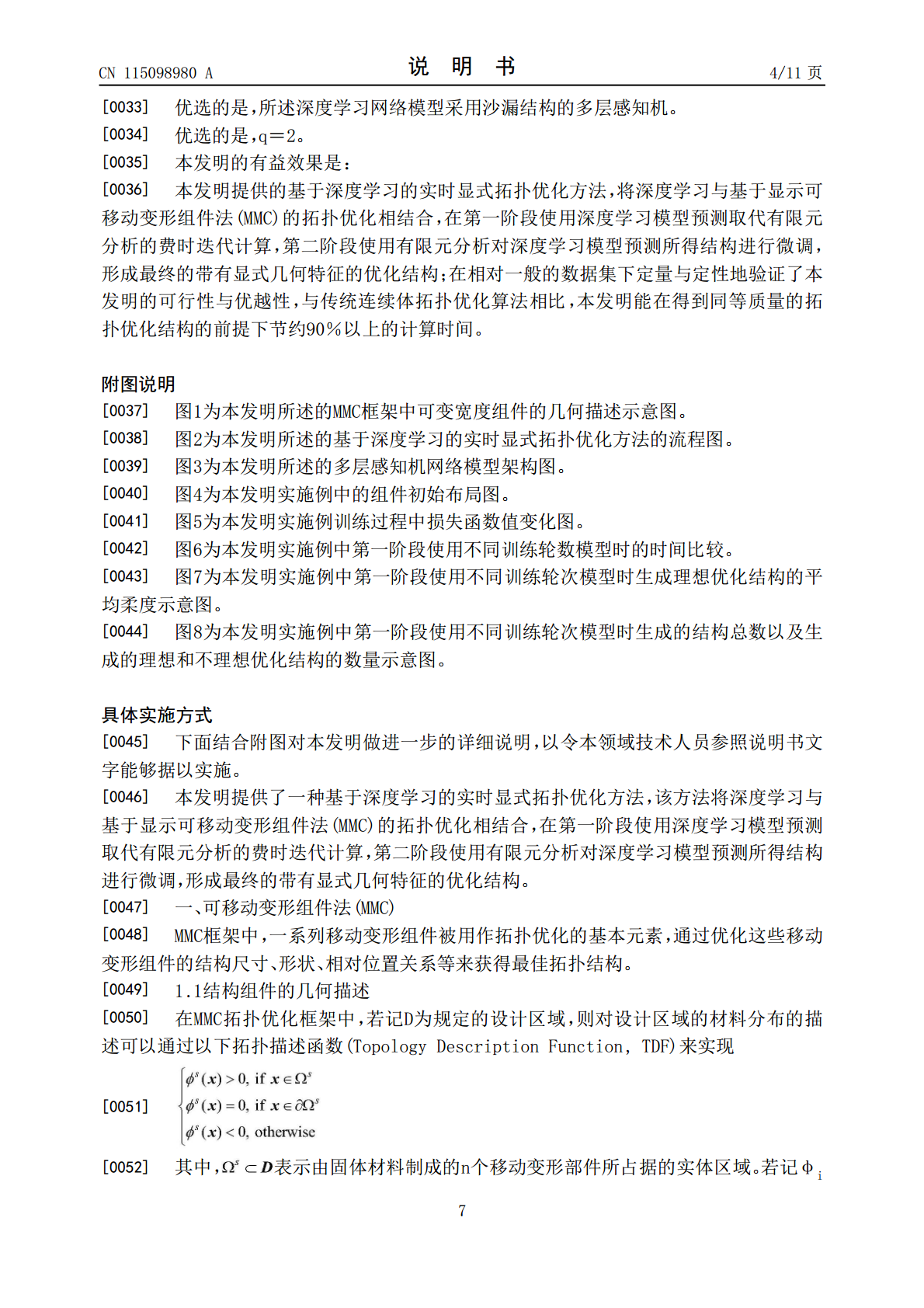
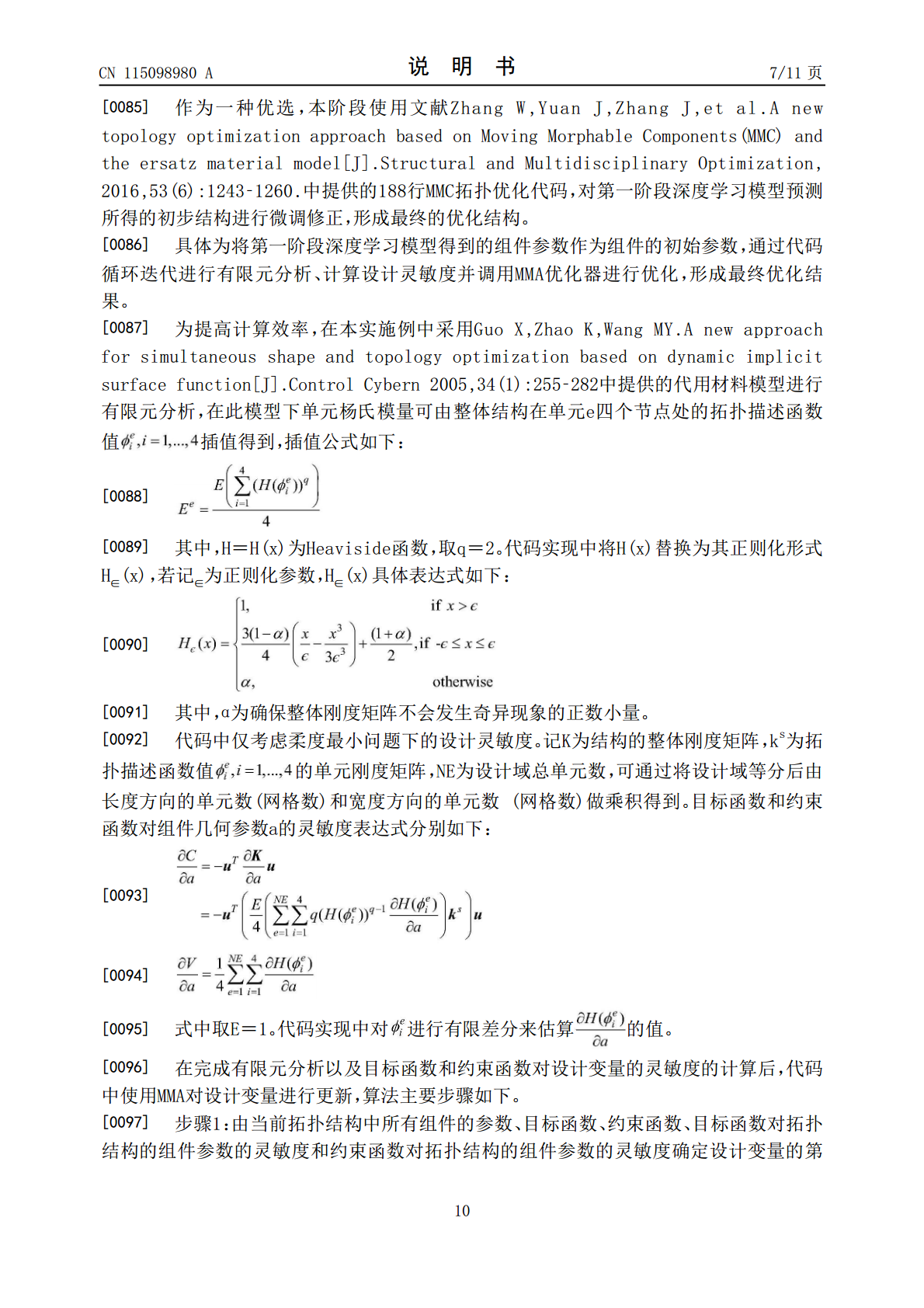
本发明公开了一种基于深度学习的实时显式拓扑优化方法,包括:一、构建深度学习网络模型,并对深度学习网络模型进行训练,得到拓扑结构优化网络模型;二、将拓扑优化初始条件作为输入参数输入拓扑结构优化网络模型,得到初步拓扑优化结构的组件参数;其中,拓扑优化初始条件为:负载条件和边界条件;组件参数为:组件中心坐标、组件半长、组件两端及中心的半宽和组件相对于正半轴的倾斜角度;三、以初步拓扑优化结构的组件参数作为初始参数,以体积约束下拓扑结构的柔度最小为优化目标,依据目标函数对拓扑结构的组件参数的灵敏度和约束函数对拓扑结

基于等几何分析的显式拓扑优化方法及应用.docx
基于等几何分析的显式拓扑优化方法及应用基于等几何分析的显式拓扑优化方法及应用摘要:随着计算机技术的快速发展,拓扑优化成为了一种高效的结构设计方法。拓扑优化通过对结构进行形状和尺寸的调整,以达到最佳的性能和重量比。传统的拓扑优化方法通常需要大量的数值计算和迭代求解,而基于等几何分析的显式拓扑优化方法则能够大大简化计算过程,提高优化效率。本文将介绍基于等几何分析的显式拓扑优化方法的基本原理和应用,并对其优势和局限性进行讨论。关键词:拓扑优化,等几何分析,显式拓扑优化,权重法,变形法1.引言拓扑优化是通过改变结

基于等几何分析的显式拓扑优化方法及应用的开题报告.docx
基于等几何分析的显式拓扑优化方法及应用的开题报告随着工业技术发展和人类对产品质量的要求不断提高,拓扑优化技术在制造、设计等领域得到了广泛的应用。拓扑优化技术通过优化结构的拓扑形状,减少材料使用的同时,保持产品的质量和强度,提高产品的性能和效率。在这个过程中,等几何分析技术作为一种重要的分析手段,被广泛应用于拓扑优化的实践当中。本篇开题报告将介绍基于等几何分析的显式拓扑优化方法及其应用。首先,我们将简要介绍拓扑优化技术和等几何分析技术的基本原理和方法,并探讨两者之间的关系。其次,我们将介绍通过等几何分析技术
一种基于深度学习重构显式模型预测控制方法.pdf
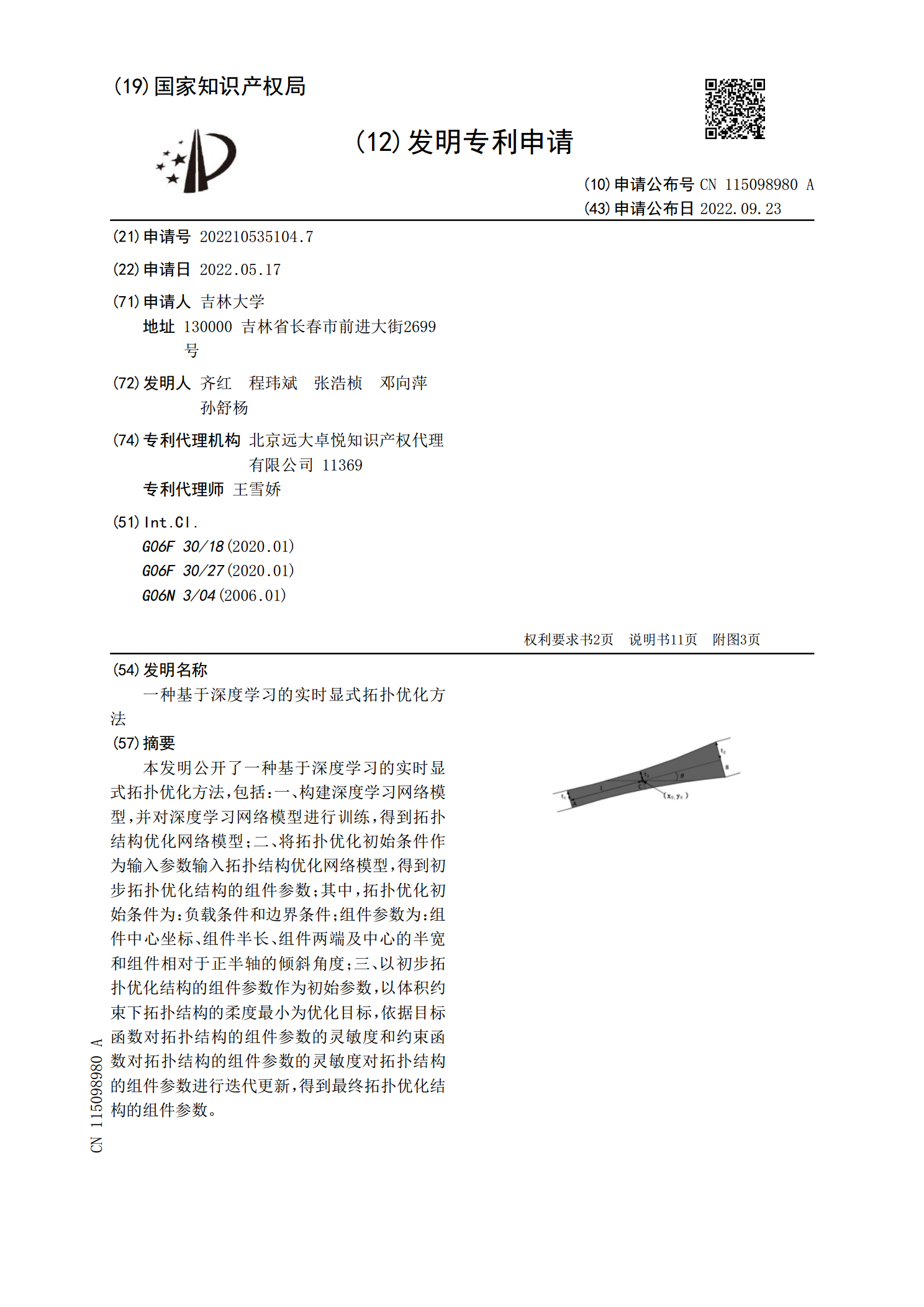
本发明公开一种基于深度学习重构显式模型预测控制方法,包含:步骤1)将显式模型预测控制重新优化表述为多参数二次规划问题;步骤2)数据的收集及深度神经网络的搭建;步骤3)训练搭建完成的深度神经网络;步骤4)验证深度神经网络的可行性;步骤5)重构显式模型预测控制;步骤6)重构后的参数优化。本发明集成了深度学习模型和显式模型预测控制,解决克服了传统模型预测控制计算资源需要高,计算时间长,保证了控制精度和预测准确率,提高了计算效率。
一种基于等几何分析的渐进式结构拓扑优化方法.pdf
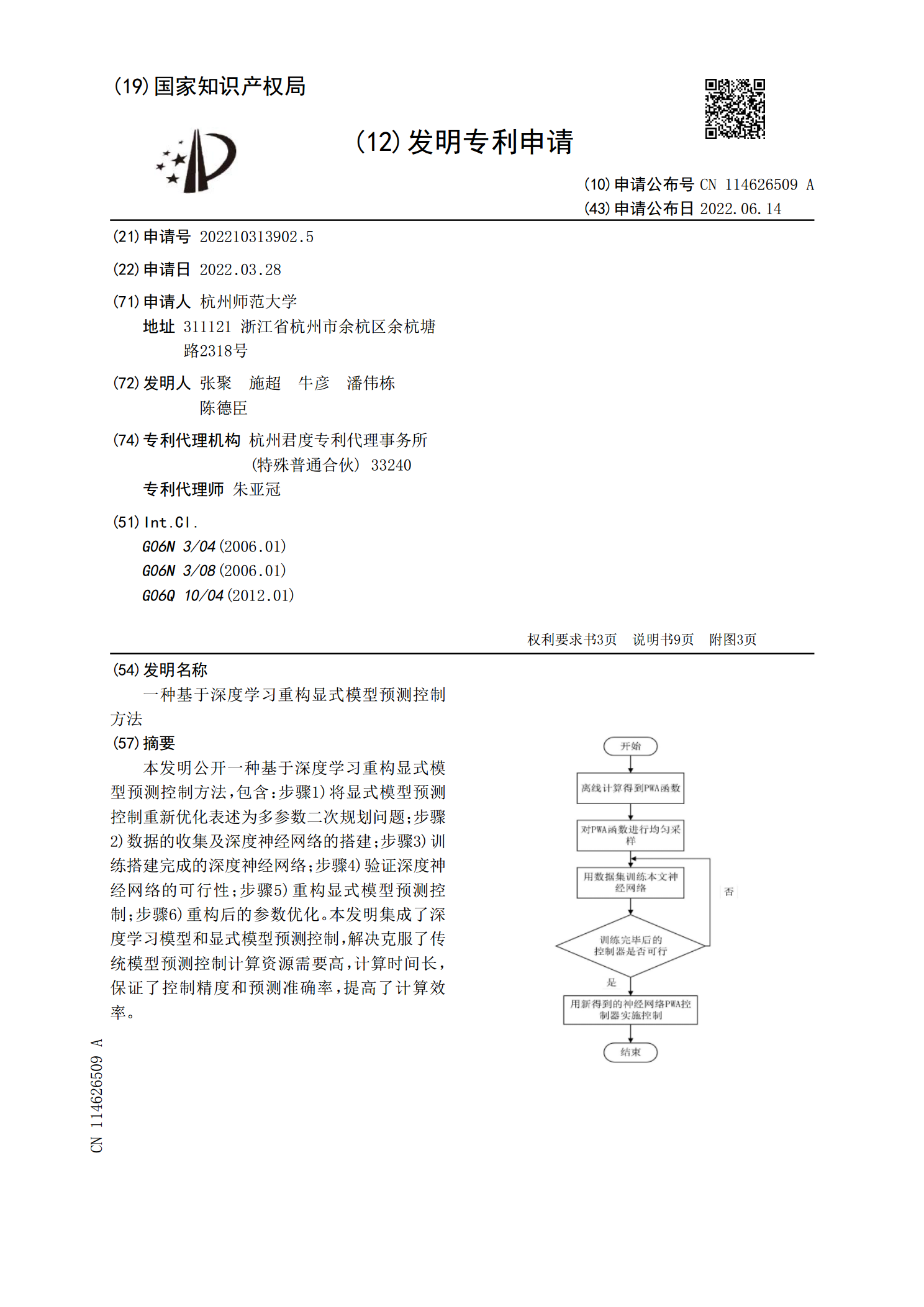
本发明属于结构优化设计相关技术领域,其公开了一种基于等几何分析的渐进式结构拓扑优化方法,包括以下步骤:(1)设定设计变量为设计域内任意一点的密度值,构建优化模型,并将设计域进行划分以得到等几何背景网格;(2)采用扩展有限元的计算法则分别对各类单元的单元刚度进行求解,进而得到该结构的整体位移向量;(3)结合设定的单元人工密度及整体位移向量计算获得单元敏度值;(4)将单元敏度值作为单元中心点敏度,并作为样本点拟合NURBS敏度场;(5)选择密度阈值来对当前的NURBS敏度场进行截取以更新设计变量;(6)判断目