
一种机动目标的雷达增程探测方法.pdf

兴朝****45

1/10

2/10

3/10

4/10
5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种机动目标的雷达增程探测方法.pdf
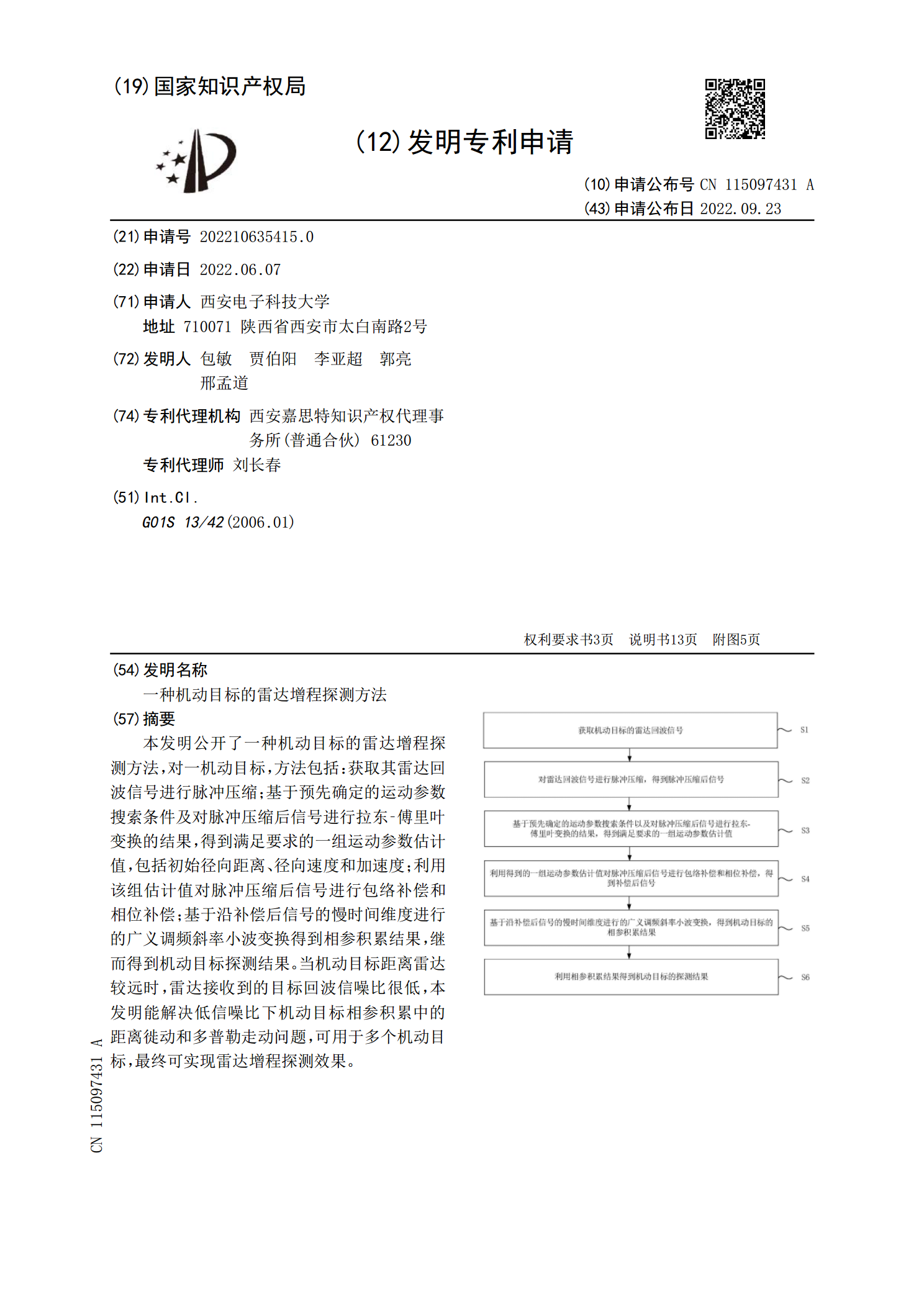
本发明公开了一种机动目标的雷达增程探测方法,对一机动目标,方法包括:获取其雷达回波信号进行脉冲压缩;基于预先确定的运动参数搜索条件及对脉冲压缩后信号进行拉东‑傅里叶变换的结果,得到满足要求的一组运动参数估计值,包括初始径向距离、径向速度和加速度;利用该组估计值对脉冲压缩后信号进行包络补偿和相位补偿;基于沿补偿后信号的慢时间维度进行的广义调频斜率小波变换得到相参积累结果,继而得到机动目标探测结果。当机动目标距离雷达较远时,雷达接收到的目标回波信噪比很低,本发明能解决低信噪比下机动目标相参积累中的距离徙动和多

旋翼目标的雷达探测系统及方法.pdf
本发明提供一种旋翼目标的雷达探测系统及系统,该系统包括:脉冲压缩模块用于对回波信息进行脉冲压缩处理,得到压缩信号;点最佳多普勒滤波模块用于对压缩信号中的低频信号滤波,输出第一滤波信号;相参积累运动目标检测模块用于对所述压缩信号中的高频信号进行相参积累处理,输出第二滤波信号;合并输出模块用于对所述第一滤波信号与所述第二滤波信号进行合并,输出合并信号;恒虚警检测模块用于对合并信号进行恒虚警检测,输出检测结果;通过合并两种模式进行恒虚警检测模块输出检测结果,利用精细化的滤波器组,以避免旋翼类目标多普勒分裂的现象

一种目标的探测方法.pdf
本发明提供了一种目标的探测方法。该方法包括:A、读取所需分析的红外偏振图像数据;B、根据所读取的红外偏振图像数据,使用公式计算目标表面边缘轮廓的偏振角;C、对计算得到的偏振角进行鲁棒性验证,并将符合鲁棒性要求的偏振角作为目标轮廓偏振角特征记录到边缘轮廓偏振角特性数据集中;D、重复上述的步骤A~C,直至形成满足需求的边缘轮廓偏振角特性数据集;E、根据边缘轮廓偏振角特性数据集中各个不同的目标轮廓偏振角特征,分别建立对应于不同姿态情况的边缘轮廓偏振角模板,通过深度学习,完成模板匹配,实现对目标的探测。应用本发明

增程器和机动车.pdf
本申请提供增程器和机动车,涉及新能源汽车的领域,增程器包括发动机、齿轮组,以及与发动机配合使用的发电机;齿轮组的第一端连接发动机的输出轴,齿轮组的第二端连接发电机的输入端,齿轮组的第一端转速小于齿轮组的第二端转速,且至少齿轮组的一部分集成于齿轮室。本申请能够解决增程器整体体积大,且发电效率低的问题。

一种微波光子雷达探测装置及其探测方法.pdf
本发明提供一种微波光子雷达探测装置及其探测方法,该装置包括信号调频模块、发射端、接收端、混频模块和信号处理模块;信号调频模块用于调制基带信号产生线性调频信号;线性调频信号包括第一线性调频信号和第二线性调频信号;第一线性调频信号的频率与基带信号的频率相同;第二线性调频信号的频率是基带信号的频率的三倍;混频模块用于将线性调频信号与回波信号混频,获得中频信号;中频信号的频率为回波延时乘以线性调频斜率加多普勒频移;信号处理模块用于处理中频信号,获得实时的多普勒频移;多普勒频移的正负代表径向速度方向。本发明通过设置