
一种多视角注意力机制的端到端自动驾驶行为决策方法.pdf

一吃****春艳

1/8
2/8
3/8
4/8
5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种多视角注意力机制的端到端自动驾驶行为决策方法.pdf
本发明公开了一种多视角注意力机制端到端自动驾驶行为决策方法,属于自动驾驶技术领域。该方法基于多摄像头获取的视频流信息,得到各视角的多时刻场景图像;将其分别降维后得到各视角特征,通过多视角注意力网络模块提取出各视角特征融合了其它视角不同事物的权重信息,再将该权重信息作用回原输入,得到各视角的融合特征;再分别经过池化处理后输入长短时记忆网络,获取各视角的时序特征;最后结合实时导航信息,预测车辆的转角控制量和速度控制量,作为最终的决策信息。本发明基于多视角注意力,综合各个视觉传感器提取车身周围目标位置信息和时间

基于MM-STConv的端到端自动驾驶行为决策模型.docx
基于MM-STConv的端到端自动驾驶行为决策模型摘要:自动驾驶技术的快速发展促进了金融、物流、交通等领域的快速发展,成为未来发展的热点。在自动驾驶行为决策方面,端到端模型能够直接从传感器输入到决策输出,实现一站式的处理,具有快速、可靠的特点。本文基于MM-STConv提出了一种端到端自动驾驶行为决策模型,经过实验验证,该模型表现出了较好的决策性能,具有很好的应用前景。关键词:端到端模型,自动驾驶,行为决策,MM-STConv1.介绍自动驾驶技术的快速发展使得它成为了一个热门的话题。自动驾驶技术不仅有助于
一种基于驾驶先验知识的端到端自动驾驶决策方法.pdf
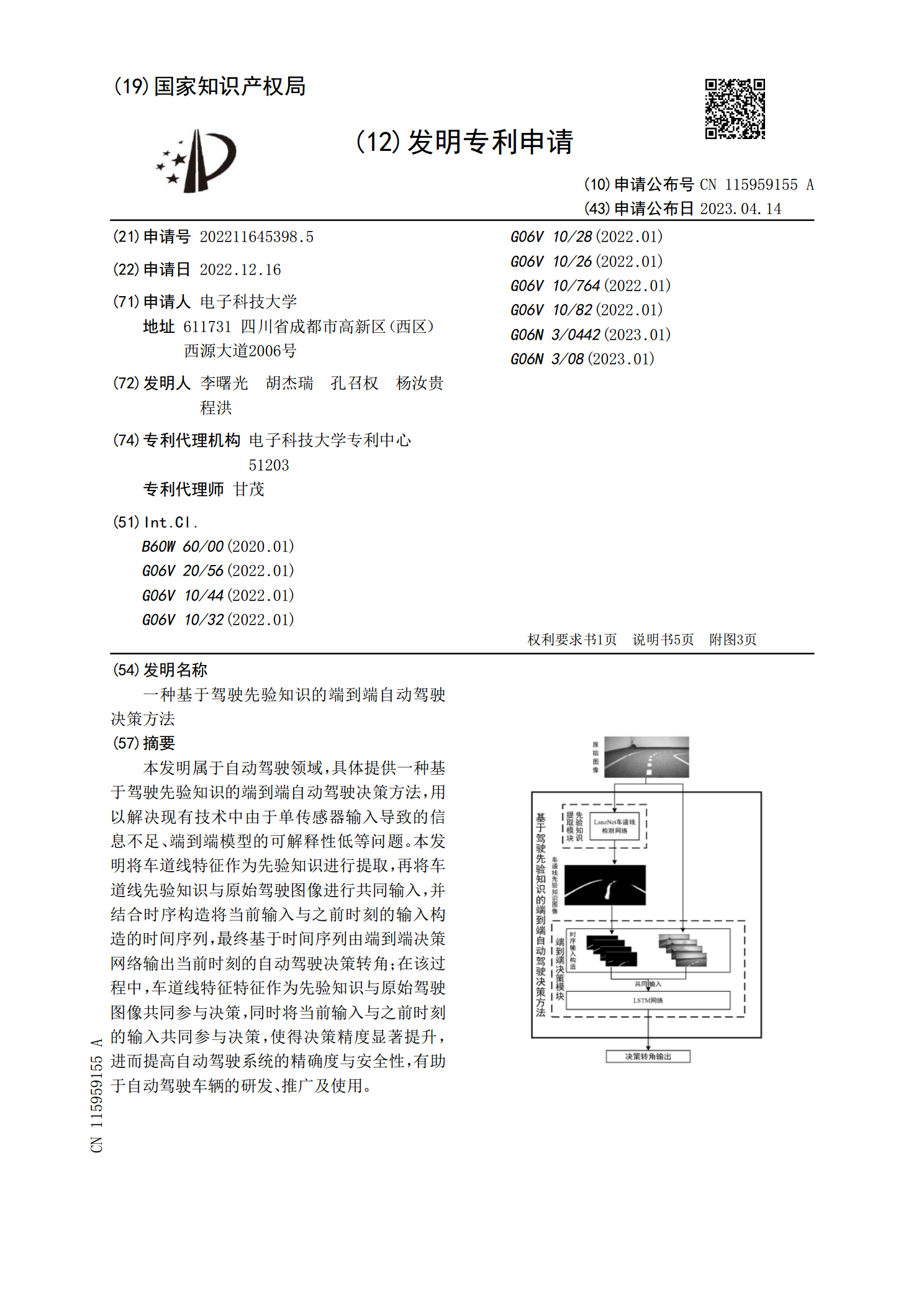
本发明属于自动驾驶领域,具体提供一种基于驾驶先验知识的端到端自动驾驶决策方法,用以解决现有技术中由于单传感器输入导致的信息不足、端到端模型的可解释性低等问题。本发明将车道线特征作为先验知识进行提取,再将车道线先验知识与原始驾驶图像进行共同输入,并结合时序构造将当前输入与之前时刻的输入构造的时间序列,最终基于时间序列由端到端决策网络输出当前时刻的自动驾驶决策转角;在该过程中,车道线特征特征作为先验知识与原始驾驶图像共同参与决策,同时将当前输入与之前时刻的输入共同参与决策,使得决策精度显著提升,进而提高自动驾

一种基于混合注意力机制的端到端单目标跟踪方法及装置.pdf
一种基于混合注意力机制的端到端单目标跟踪方法,构建一个基于Transformer跟踪的跟踪框架MixFormer,用于目标跟踪,跟踪框架的构建包括以下步骤:1)数据准备阶段;2)网络配置阶段;3)离线训练阶段;4)在线跟踪阶段。本发明采用了基于混合注意力的骨干网络来同时进行特征提取与目标信息融合,得到了一个简洁清晰的跟踪框架,并且能有效地提升性能。此外,本发明的跟踪方法能对跟踪过程中的物体变形有更好的适应能力,有效地提升目标回归的精度。
一种基于端到端的自动驾驶车辆实现方法.pdf
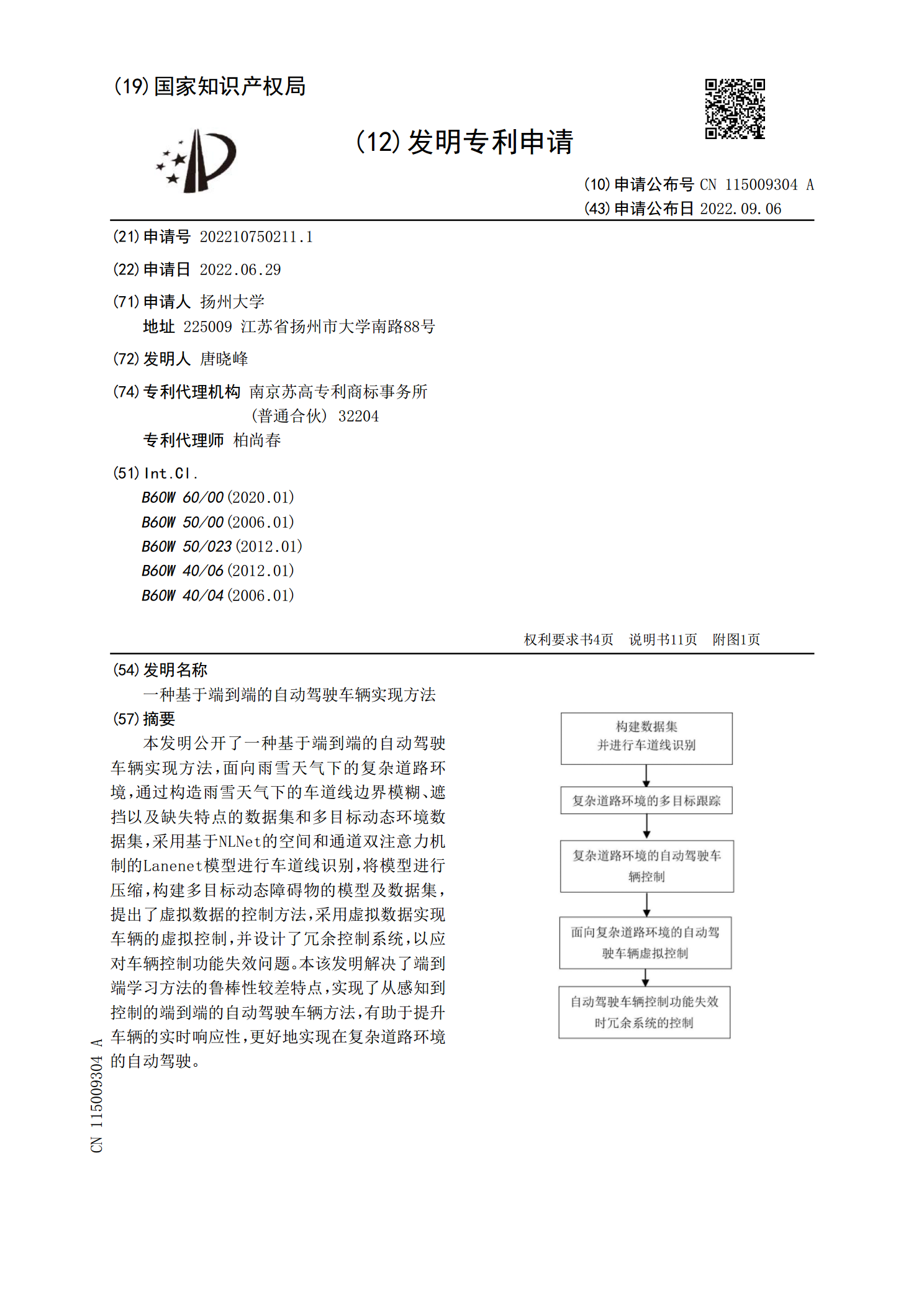
本发明公开了一种基于端到端的自动驾驶车辆实现方法,面向雨雪天气下的复杂道路环境,通过构造雨雪天气下的车道线边界模糊、遮挡以及缺失特点的数据集和多目标动态环境数据集,采用基于NLNet的空间和通道双注意力机制的Lanenet模型进行车道线识别,将模型进行压缩,构建多目标动态障碍物的模型及数据集,提出了虚拟数据的控制方法,采用虚拟数据实现车辆的虚拟控制,并设计了冗余控制系统,以应对车辆控制功能失效问题。本该发明解决了端到端学习方法的鲁棒性较差特点,实现了从感知到控制的端到端的自动驾驶车辆方法,有助于提升车辆的