
基于TWR-TDOA估计和MPGA布局优化的UWB定位跟踪系统的实现方法.pdf

增梅****主啊

1/10

2/10
3/10
4/10
5/10
6/10
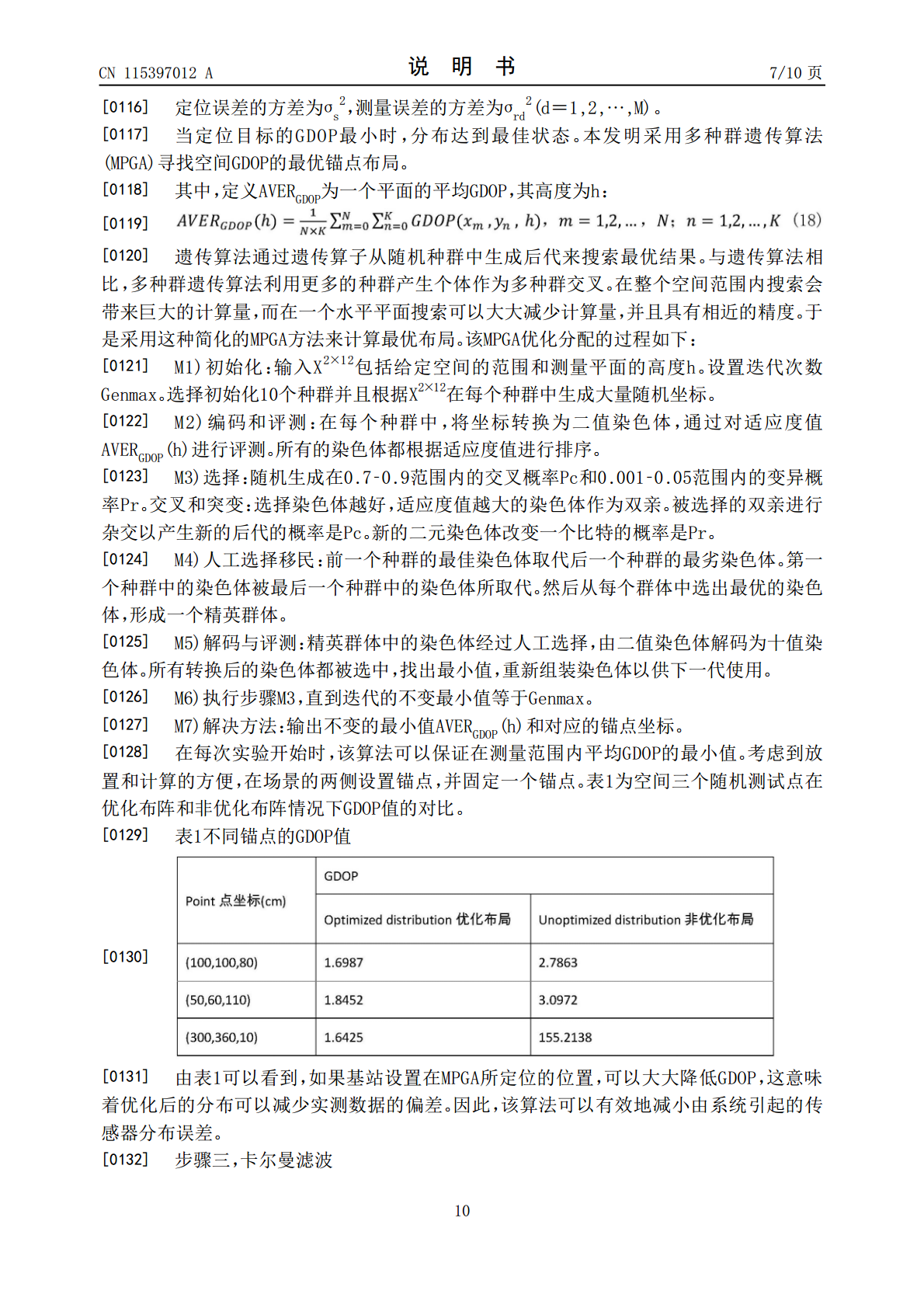
7/10
8/10
9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于TWR-TDOA估计和MPGA布局优化的UWB定位跟踪系统的实现方法.pdf
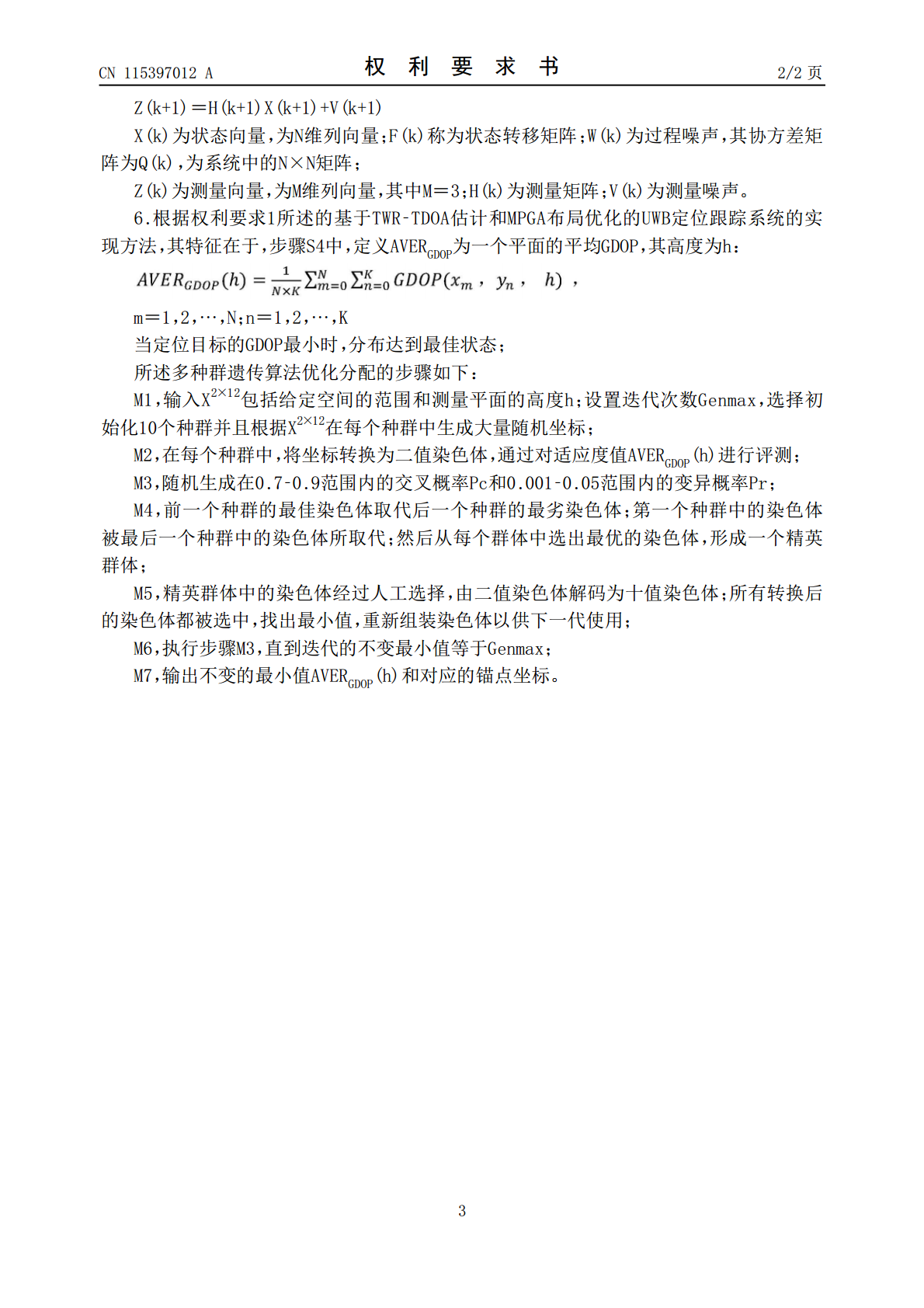
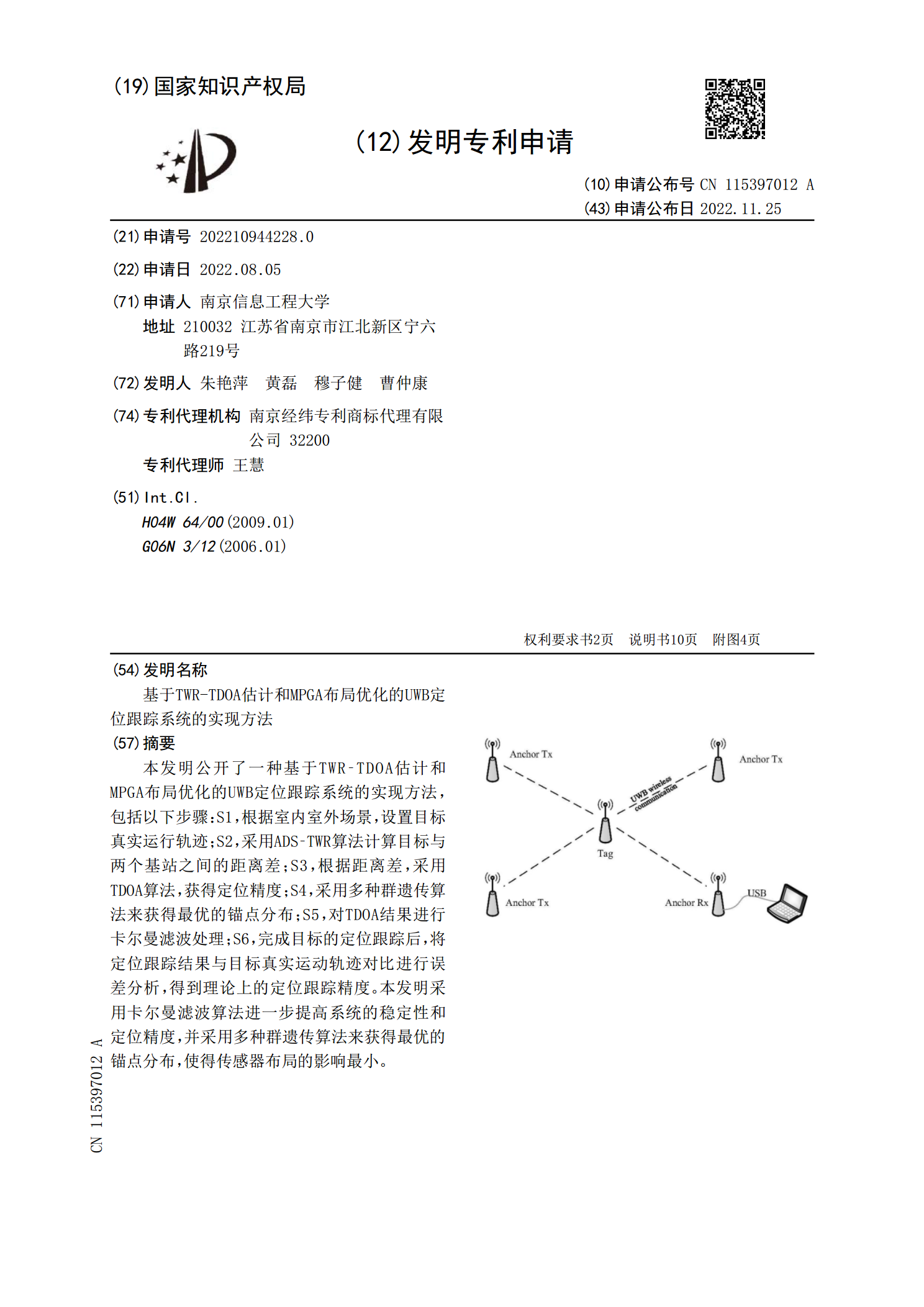
本发明公开了一种基于TWR‑TDOA估计和MPGA布局优化的UWB定位跟踪系统的实现方法,包括以下步骤:S1,根据室内室外场景,设置目标真实运行轨迹;S2,采用ADS‑TWR算法计算目标与两个基站之间的距离差;S3,根据距离差,采用TDOA算法,获得定位精度;S4,采用多种群遗传算法来获得最优的锚点分布;S5,对TDOA结果进行卡尔曼滤波处理;S6,完成目标的定位跟踪后,将定位跟踪结果与目标真实运动轨迹对比进行误差分析,得到理论上的定位跟踪精度。本发明采用卡尔曼滤波算法进一步提高系统的稳定性和定位精度,并
基于UWB定位的基站部署优化方法及系统.pdf
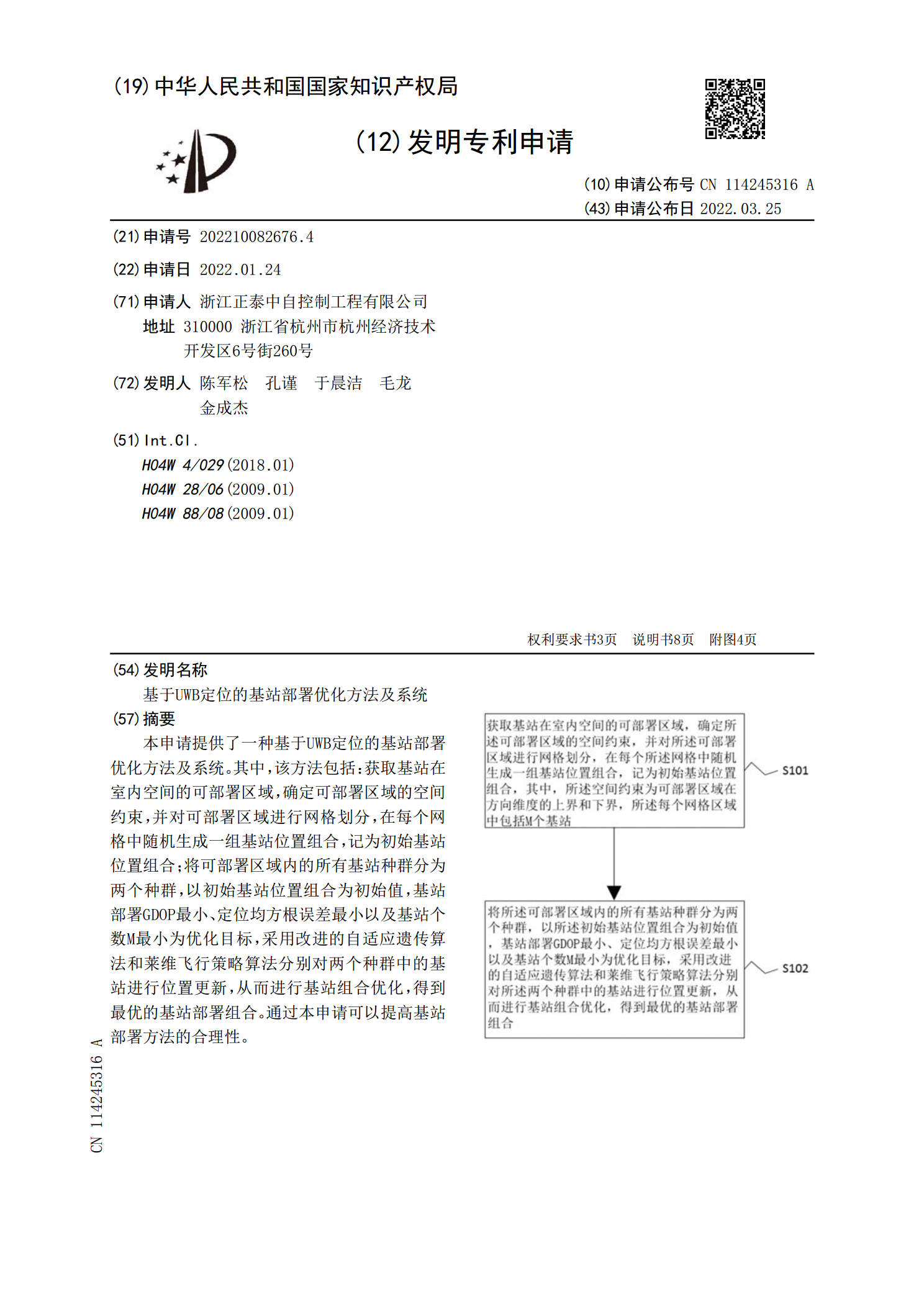
本申请提供了一种基于UWB定位的基站部署优化方法及系统。其中,该方法包括:获取基站在室内空间的可部署区域,确定可部署区域的空间约束,并对可部署区域进行网格划分,在每个网格中随机生成一组基站位置组合,记为初始基站位置组合;将可部署区域内的所有基站种群分为两个种群,以初始基站位置组合为初始值,基站部署GDOP最小、定位均方根误差最小以及基站个数M最小为优化目标,采用改进的自适应遗传算法和莱维飞行策略算法分别对两个种群中的基站进行位置更新,从而进行基站组合优化,得到最优的基站部署组合。通过本申请可以提高基站部署
基于UWB定位的线控底盘轨迹跟踪控制系统及方法.pdf
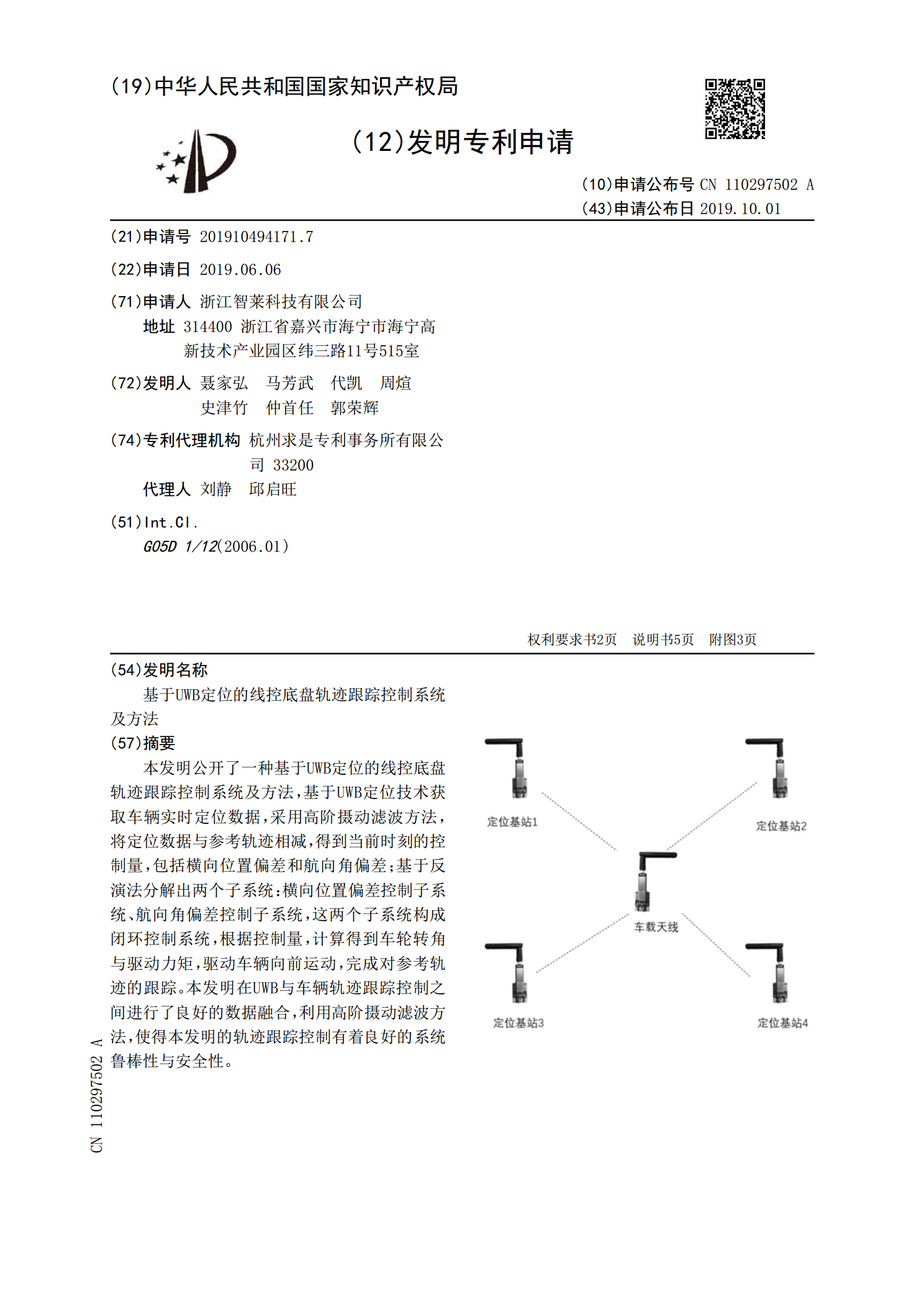
本发明公开了一种基于UWB定位的线控底盘轨迹跟踪控制系统及方法,基于UWB定位技术获取车辆实时定位数据,采用高阶摄动滤波方法,将定位数据与参考轨迹相减,得到当前时刻的控制量,包括横向位置偏差和航向角偏差;基于反演法分解出两个子系统:横向位置偏差控制子系统、航向角偏差控制子系统,这两个子系统构成闭环控制系统,根据控制量,计算得到车轮转角与驱动力矩,驱动车辆向前运动,完成对参考轨迹的跟踪。本发明在UWB与车辆轨迹跟踪控制之间进行了良好的数据融合,利用高阶摄动滤波方法,使得本发明的轨迹跟踪控制有着良好的系统鲁棒
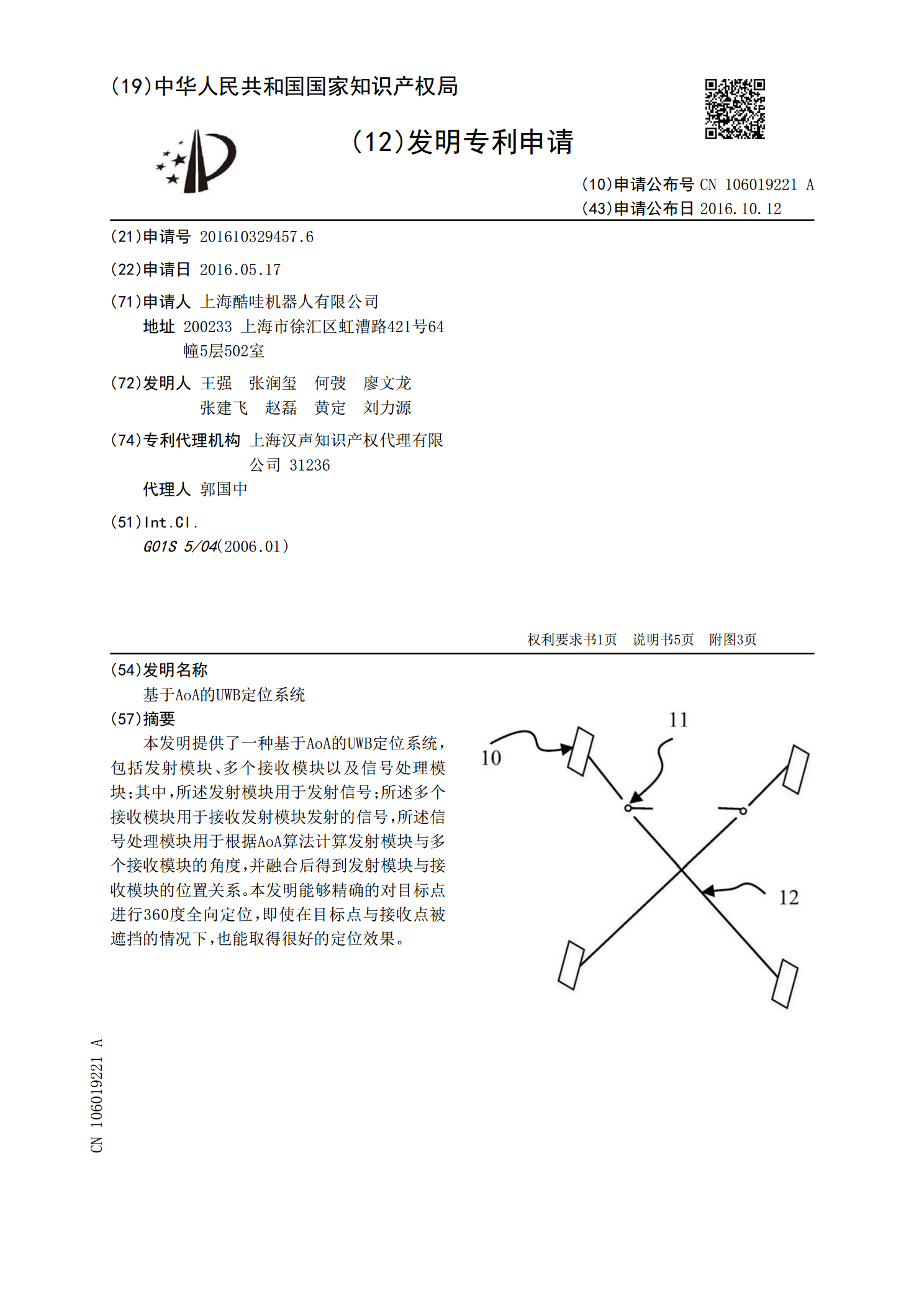
基于AoA的UWB定位系统.pdf
本发明提供了一种基于AoA的UWB定位系统,包括发射模块、多个接收模块以及信号处理模块;其中,所述发射模块用于发射信号;所述多个接收模块用于接收发射模块发射的信号,所述信号处理模块用于根据AoA算法计算发射模块与多个接收模块的角度,并融合后得到发射模块与接收模块的位置关系。本发明能够精确的对目标点进行360度全向定位,即使在目标点与接收点被遮挡的情况下,也能取得很好的定位效果。
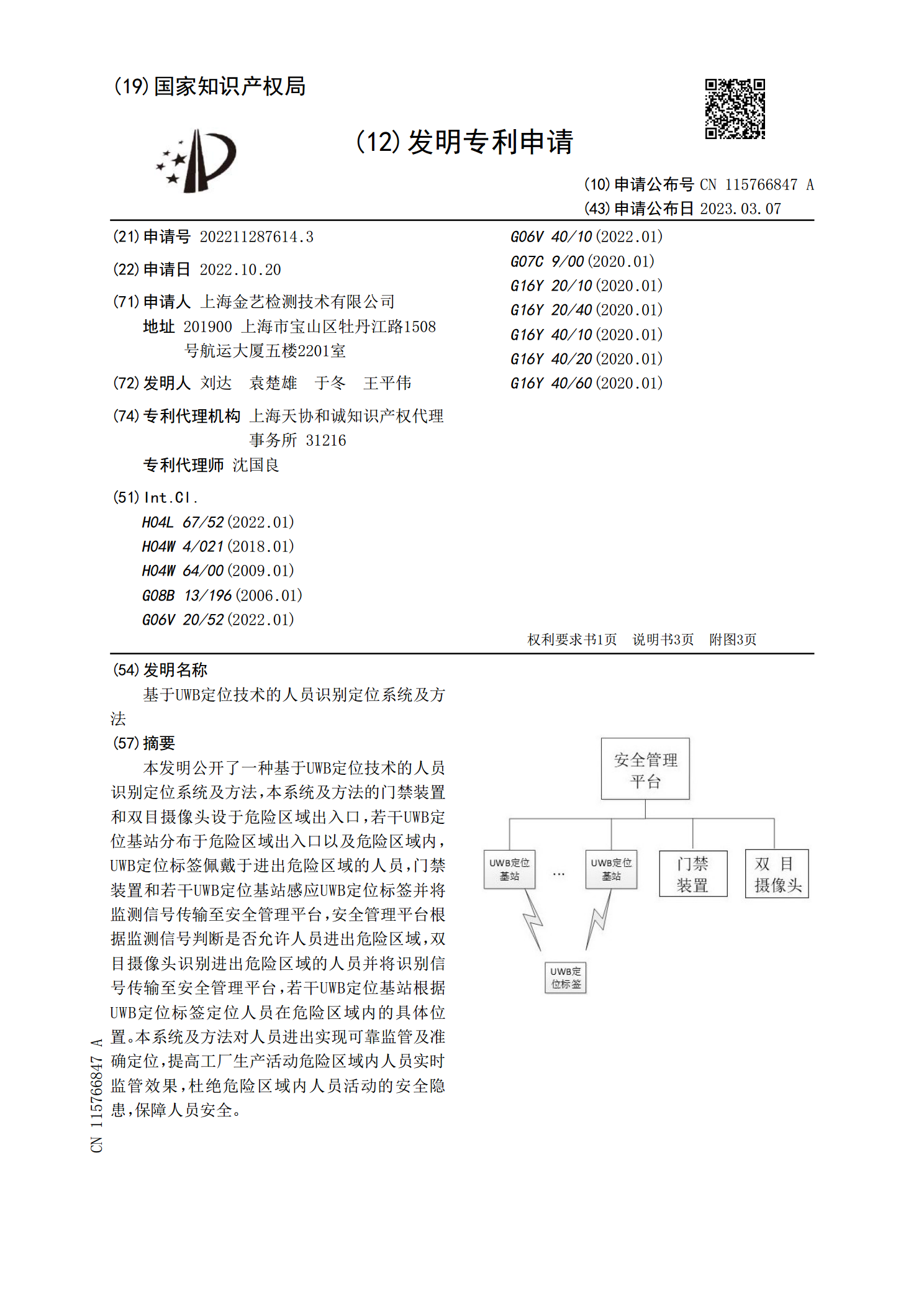
基于UWB定位技术的人员识别定位系统及方法.pdf
本发明公开了一种基于UWB定位技术的人员识别定位系统及方法,本系统及方法的门禁装置和双目摄像头设于危险区域出入口,若干UWB定位基站分布于危险区域出入口以及危险区域内,UWB定位标签佩戴于进出危险区域的人员,门禁装置和若干UWB定位基站感应UWB定位标签并将监测信号传输至安全管理平台,安全管理平台根据监测信号判断是否允许人员进出危险区域,双目摄像头识别进出危险区域的人员并将识别信号传输至安全管理平台,若干UWB定位基站根据UWB定位标签定位人员在危险区域内的具体位置。本系统及方法对人员进出实现可靠监管及准