
一种基于多维模型融合的水下目标识别方法.pdf

一吃****福乾

1/10

2/10

3/10
4/10

5/10

6/10
7/10

8/10

9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于多维模型融合的水下目标识别方法.pdf
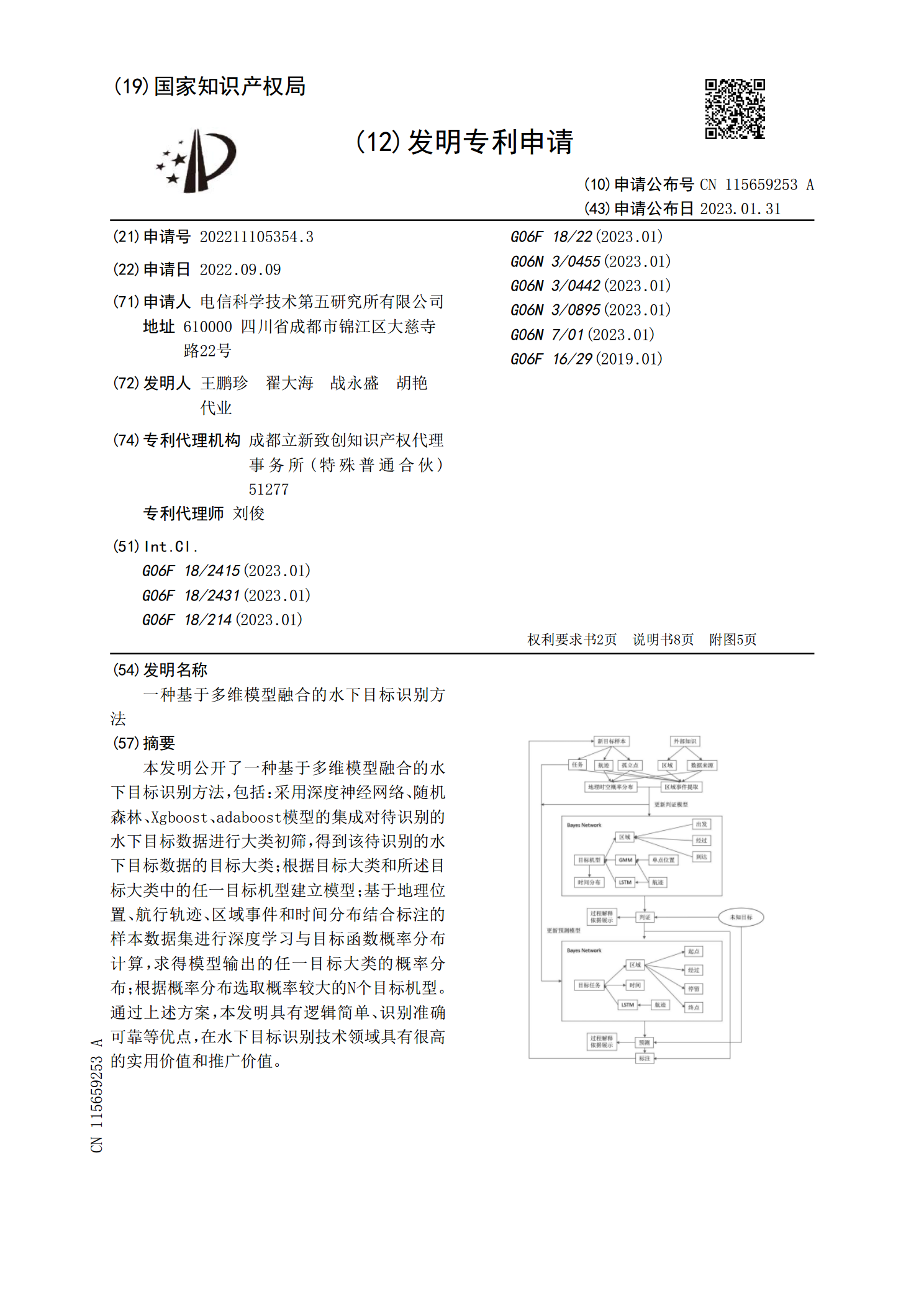
本发明公开了一种基于多维模型融合的水下目标识别方法,包括:采用深度神经网络、随机森林、Xgboost、adaboost模型的集成对待识别的水下目标数据进行大类初筛,得到该待识别的水下目标数据的目标大类;根据目标大类和所述目标大类中的任一目标机型建立模型;基于地理位置、航行轨迹、区域事件和时间分布结合标注的样本数据集进行深度学习与目标函数概率分布计算,求得模型输出的任一目标大类的概率分布;根据概率分布选取概率较大的N个目标机型。通过上述方案,本发明具有逻辑简单、识别准确可靠等优点,在水下目标识别技术领域具有

一种基于混合模型融合的宽带雷达目标HRRP识别方法.pdf
本发明涉及一种基于混合模型融合的宽带雷达目标HRRP识别方法,属于雷达目标识别技术领域。包括:1)采集数据集并划分测试集与训练集;2)将标志位L_done、C_done置0;3)利用训练集分别对F‑CNN模型的两个子模型CNN与LightGBM模型进行训练;4)利用F‑CNN模型识别测试集种类,具体为:经训练后子模型处理,得到分类结果A与B。判断标志位是否均为1;若不是,则等待;若是,则将结果A与B输入决策树合并,输出即为F‑CNN模型识别结果;所述方法可根据HRRP信号对探测目标进行有效分类;在不同信噪
基于Copula理论的多维异构信息融合识别方法.pdf
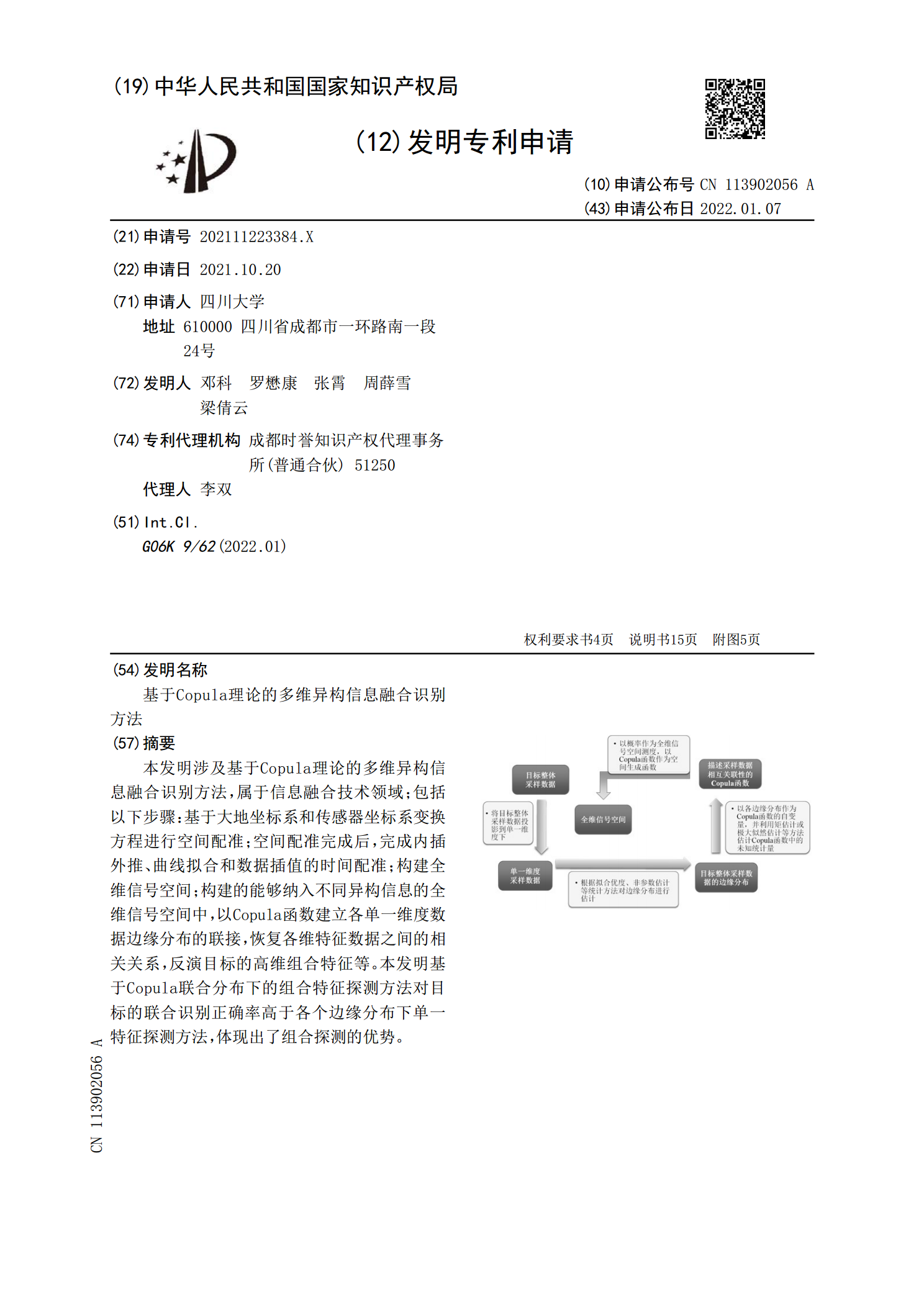
本发明涉及基于Copula理论的多维异构信息融合识别方法,属于信息融合技术领域;包括以下步骤:基于大地坐标系和传感器坐标系变换方程进行空间配准;空间配准完成后,完成内插外推、曲线拟合和数据插值的时间配准;构建全维信号空间;构建的能够纳入不同异构信息的全维信号空间中,以Copula函数建立各单一维度数据边缘分布的联接,恢复各维特征数据之间的相关关系,反演目标的高维组合特征等。本发明基于Copula联合分布下的组合特征探测方法对目标的联合识别正确率高于各个边缘分布下单一特征探测方法,体现出了组合探测的优势。

一种基于多维图像的目标智能匹配和识别方法.pdf
本发明公开一种基于多维图像的目标智能匹配和识别方法,具体包括以下步骤:S1:对电网布控巡检区域的固定摄像头及机器人、无人机摄像头搜集图像进行筛选、整理,形成相应的多尺度目标训练数据;S2:提出多尺度下同一目标匹配度最大化准则;S3提出多维图像联合学习模型;S4:实现不同摄像头下不同分辨率的目标匹配;S5对匹配成功的图像进行进一步的识别,本发明通过不同尺度的信息有效加强了低分辨率下目标的表达信息,同时,利用匹配度最大化准则判别不同分辨率下同一目标,进而学习不同尺度最优度量模型,相比于单一尺度的匹配方案,本发

一种基于频谱细化技术的水下目标识别方法.docx
一种基于频谱细化技术的水下目标识别方法摘要:水下目标识别一直是海洋工程和海洋勘测等领域需要关注的问题,不同的水下目标具有特定的频谱特征,通过提取这些特征可以有效区分水下目标。基于频谱细化技术的水下目标识别方法,利用了信号处理领域的相关知识,通过对水下目标的频谱分析和处理,可以得到许多有用的特征信息。本文介绍了这种方法的优势、原理以及相关的应用案例。关键词:水下目标识别、频谱特征、频谱细化技术、信号处理一、引言随着海洋勘测、海底资源开发等领域的不断扩大,水下目标识别成为了一个非常重要的问题。水下目标繁多,种