
一种基于多维图像的目标智能匹配和识别方法.pdf

景山****魔王


1/10
2/10
3/10
4/10

5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于多维图像的目标智能匹配和识别方法.pdf
本发明公开一种基于多维图像的目标智能匹配和识别方法,具体包括以下步骤:S1:对电网布控巡检区域的固定摄像头及机器人、无人机摄像头搜集图像进行筛选、整理,形成相应的多尺度目标训练数据;S2:提出多尺度下同一目标匹配度最大化准则;S3提出多维图像联合学习模型;S4:实现不同摄像头下不同分辨率的目标匹配;S5对匹配成功的图像进行进一步的识别,本发明通过不同尺度的信息有效加强了低分辨率下目标的表达信息,同时,利用匹配度最大化准则判别不同分辨率下同一目标,进而学习不同尺度最优度量模型,相比于单一尺度的匹配方案,本发

基于图像和点云实例匹配的智能车目标检测和跟踪.docx
基于图像和点云实例匹配的智能车目标检测和跟踪目录一、内容简述................................................2二、技术背景................................................21.智能车技术概述........................................32.目标检测与跟踪技术....................................43.图像和点云数据介绍............
基于模板匹配的图像识别方法和系统.pdf
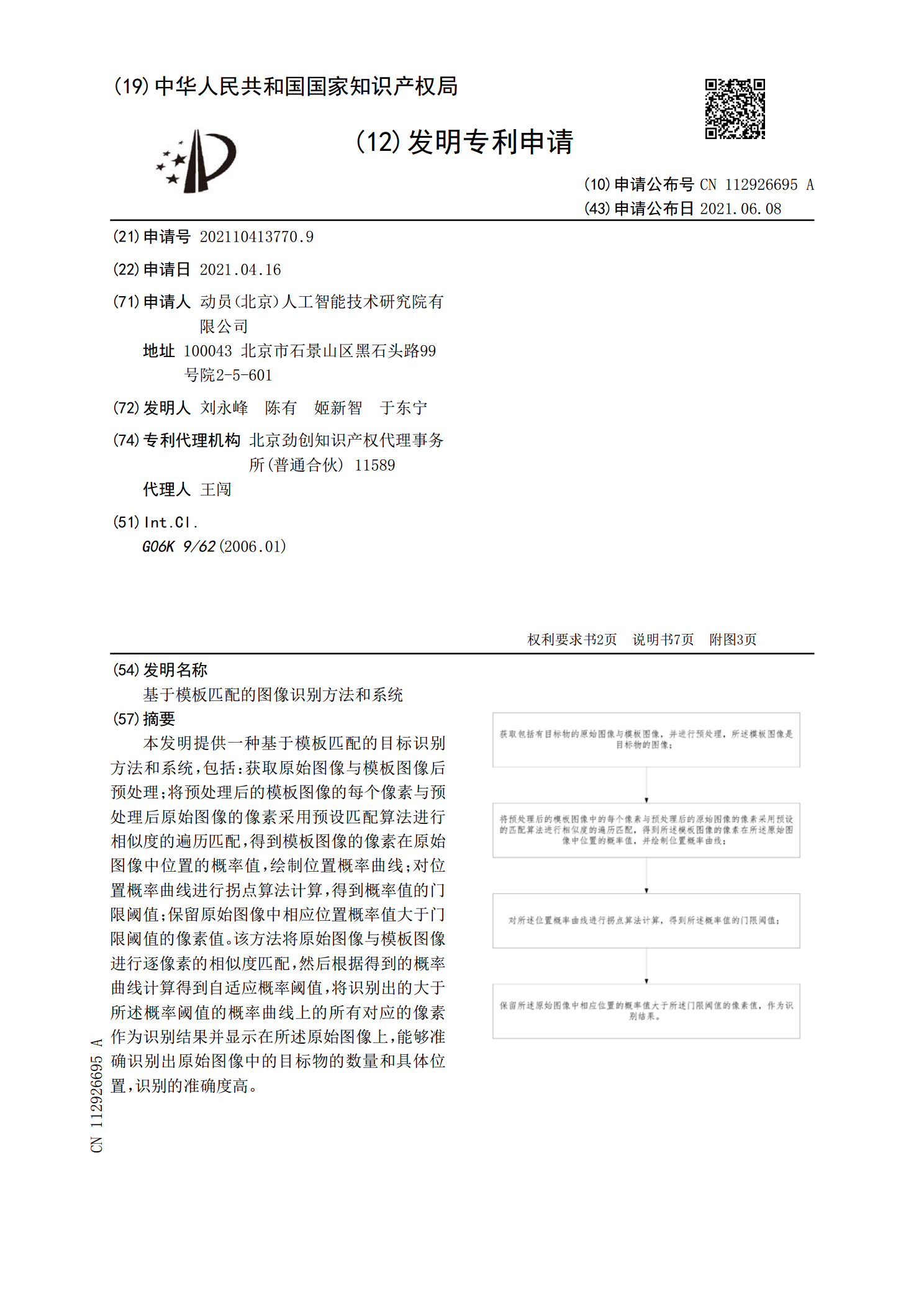
本发明提供一种基于模板匹配的目标识别方法和系统,包括:获取原始图像与模板图像后预处理;将预处理后的模板图像的每个像素与预处理后原始图像的像素采用预设匹配算法进行相似度的遍历匹配,得到模板图像的像素在原始图像中位置的概率值,绘制位置概率曲线;对位置概率曲线进行拐点算法计算,得到概率值的门限阈值;保留原始图像中相应位置概率值大于门限阈值的像素值。该方法将原始图像与模板图像进行逐像素的相似度匹配,然后根据得到的概率曲线计算得到自适应概率阈值,将识别出的大于所述概率阈值的概率曲线上的所有对应的像素作为识别结果并显

智能监控系统中图像快速匹配识别方法.docx
智能监控系统中图像快速匹配识别方法智能监控系统中图像快速匹配识别方法摘要:随着智能监控系统的快速发展,图像快速匹配识别方法在系统中起到了重要的作用。本论文针对智能监控系统中的图像快速匹配识别问题,研究了一种基于特征提取和特征匹配的方法。通过对图像特征进行提取和匹配,可以快速准确地识别出监控区域中的目标对象。实验结果表明,该方法在准确性和实时性方面都具有较好的性能。1.引言:智能监控系统是一种将计算机视觉技术与监控设备相结合的系统,目的是实现对监控区域进行全面、实时的安全监控。在智能监控系统中,图像快速匹配

一种基于群智能算法的图像匹配算法.docx
一种基于群智能算法的图像匹配算法1.引言随着数字图像的广泛应用,图像匹配成为了一个重要的领域。在图像匹配中,主要任务是找到两幅图像的相似区域。它是许多计算机视觉应用的重要组成部分,例如目标识别、三维重建、图像检索、机器人视觉等,在图像匹配领域中,群体智能算法已经被广泛应用,这些算法具有抗干扰性、全局优化能力、自适应性等优点。本文提出了一种基于群体智能算法的图像匹配算法。2.相关工作在图像匹配中,最常见的方法是基于特征描述子的匹配方法,例如SIFT,SURF等。这些方法可以很好地处理图像里的旋转、尺度、光照