
多传感器无源协同测向定位方法.pdf

是你****晨呀

1/10
2/10

3/10

4/10

5/10

6/10
7/10

8/10
9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
多传感器无源协同测向定位方法.pdf
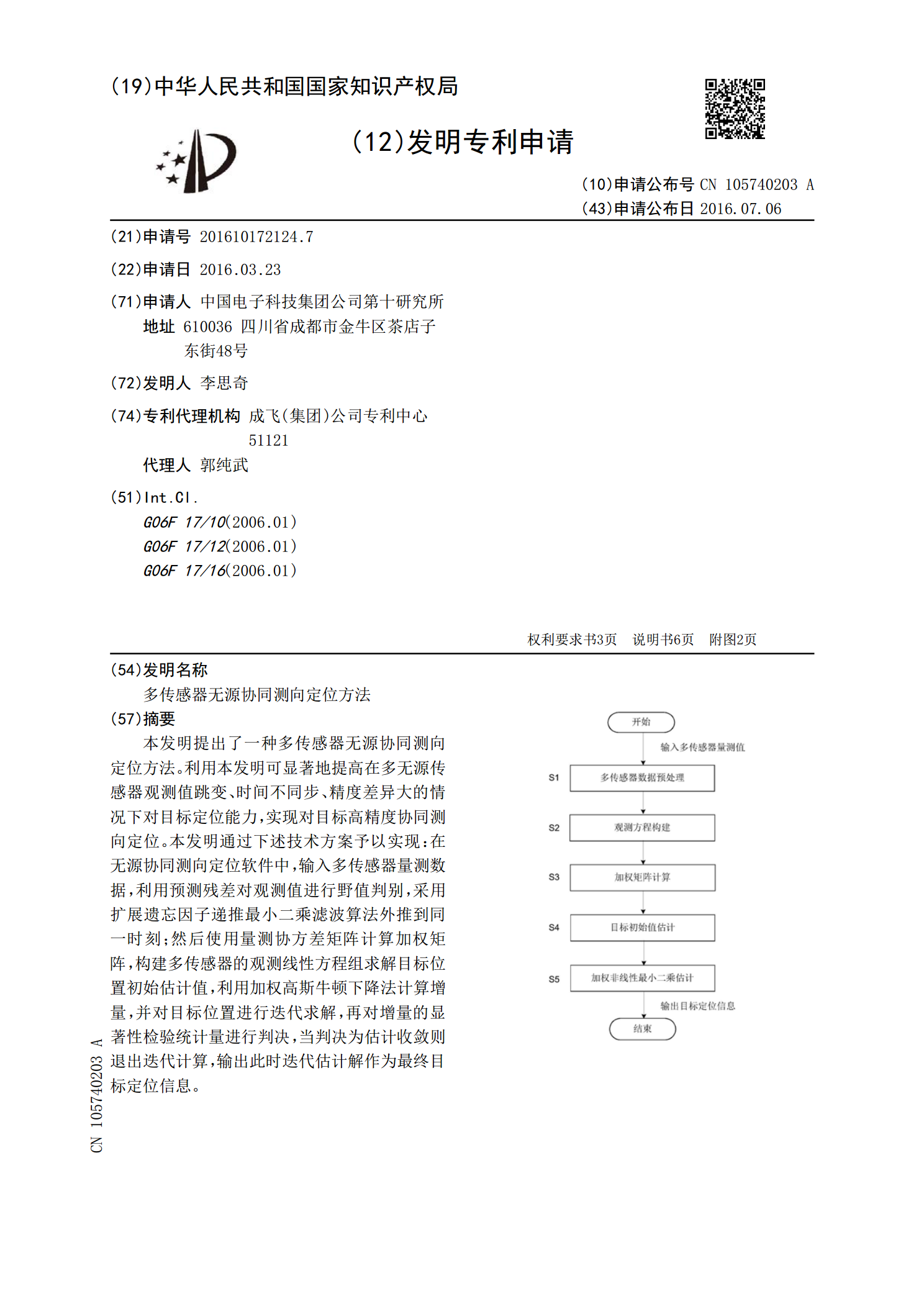
本发明提出了一种多传感器无源协同测向定位方法。利用本发明可显著地提高在多无源传感器观测值跳变、时间不同步、精度差异大的情况下对目标定位能力,实现对目标高精度协同测向定位。本发明通过下述技术方案予以实现:在无源协同测向定位软件中,输入多传感器量测数据,利用预测残差对观测值进行野值判别,采用扩展遗忘因子递推最小二乘滤波算法外推到同一时刻;然后使用量测协方差矩阵计算加权矩阵,构建多传感器的观测线性方程组求解目标位置初始估计值,利用加权高斯牛顿下降法计算增量,并对目标位置进行迭代求解,再对增量的显著性检验统计量进

多舰协同侦察的无源测向时差定位方法.docx
多舰协同侦察的无源测向时差定位方法多舰协同侦察的无源测向时差定位方法摘要:无源测向技术是一种通过接收来自目标的无源信号来进行测向的方法。在多舰协同侦察中,无源测向时差定位方法被广泛应用。本文主要介绍了多舰协同侦察的无源测向时差定位方法,包括经典的全局时差定位算法和基于压缩感知理论的分布式时差定位算法,对比了它们的优缺点,并对其未来发展进行了展望。1.研究背景随着现代通信技术的发展,通信信号变得越来越复杂多样,无源测向技术成为了目标信号定位的新方向。多舰协同侦察无源测向时差定位方法通过多个舰载传感器接收目标

无源测向定位算法研究.pptx
添加副标题目录PART01PART02算法定义和原理算法分类和特点算法应用场景PART03研究进展和成果算法性能评估指标现有算法的优缺点分析PART04信号处理技术角度测量技术定位算法优化技术算法实时性和精度问题PART05实验设置和数据采集实验结果分析和比较算法性能提升方案探讨PART06算法改进和优化方向算法在其他领域的应用前景无源测向定位技术的发展趋势和展望感谢您的观看

机载红外设备多平台协同探测无源定位方法.pptx
添加副标题目录PART01PART02协同探测技术概述协同探测技术原理及实现方式协同探测技术的优势与局限性PART03机载红外设备的种类与特点机载红外设备在协同探测中的任务分工与协作方式机载红外设备的数据处理与信息融合方法PART04无源定位技术概述无源定位技术的基本原理及实现方式无源定位技术的优势与局限性PART05系统总体架构与设计思路协同探测子系统设计无源定位子系统设计系统集成与测试方案PART06实验条件与实验环境实验方案设计与实施实验结果分析方法与数据分析实验结论与成果展示PART07机载红外设

三维多目标纯测向无源定位方法.docx
三维多目标纯测向无源定位方法三维多目标纯测向无源定位方法摘要:无源定位是一种基于接收到的信号信息,通过分析和处理信号特性,从而实现对目标位置的估计和定位的技术手段。多目标纯测向无源定位方法是在无源定位技术的基础上,实现对多个目标同时进行定位的方法。本文针对三维环境中的多目标纯测向无源定位问题进行研究,提出了一种基于信号到达角度和时间差测量的方法,并通过仿真实验验证了该方法的有效性。1.引言无线通信技术的快速发展,使得无源定位技术在定位和导航等领域得到广泛应用。在无源定位中,接收到的信号信息包含了目标的位置