
基于牛顿迭代的数控轨迹控制方法.pdf

慧颖****23

1/10

2/10

3/10
4/10
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于牛顿迭代的数控轨迹控制方法.pdf
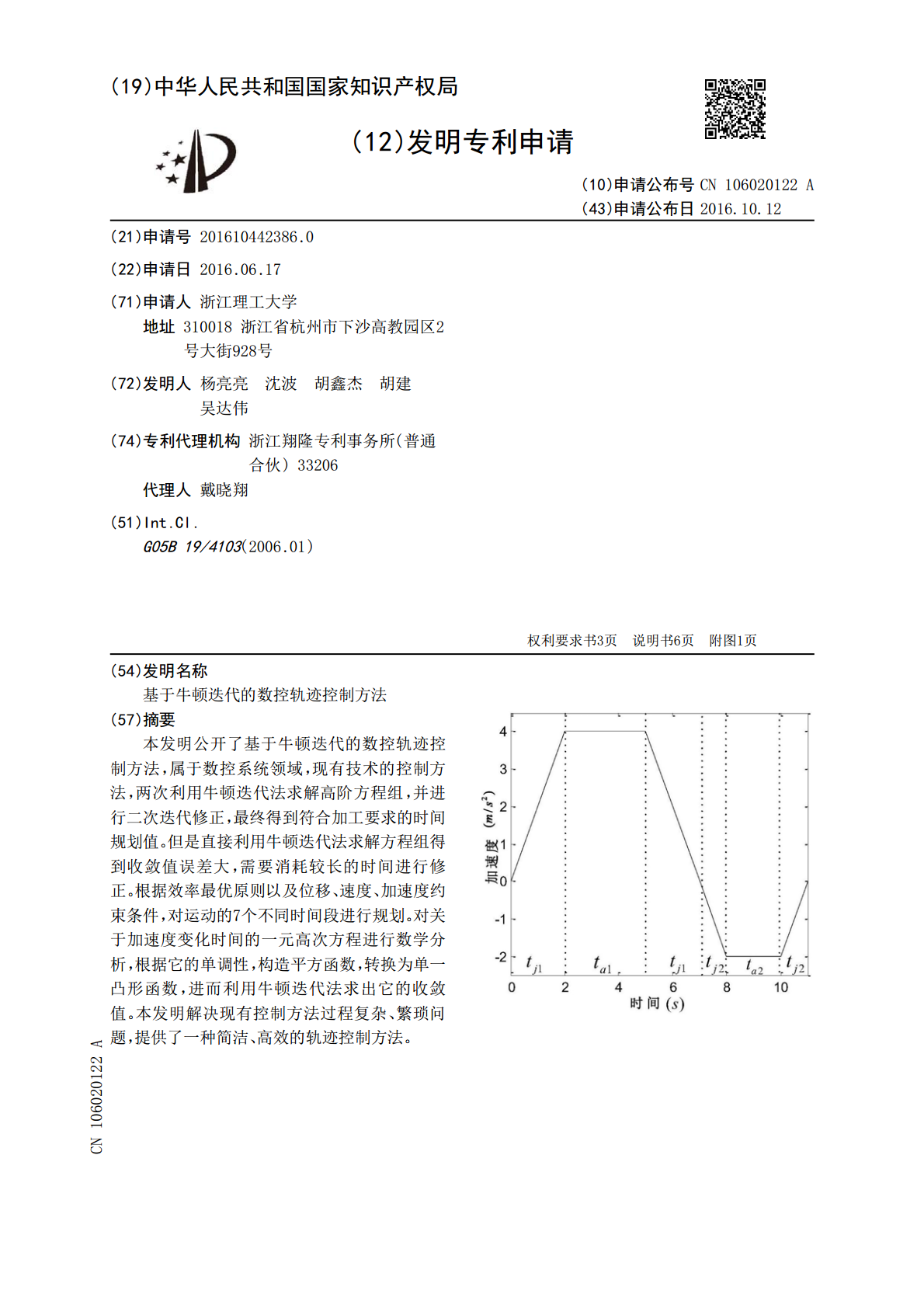
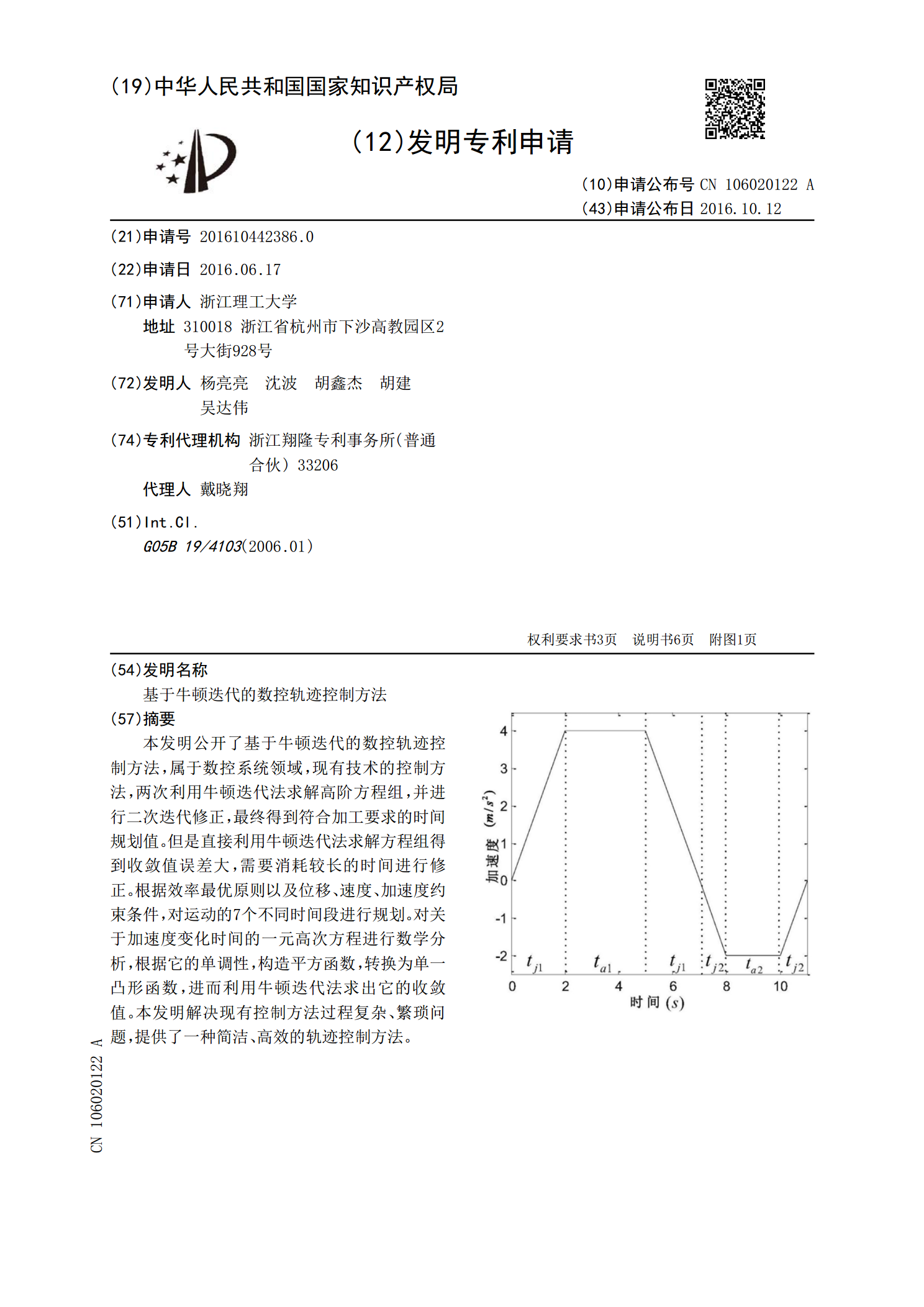
本发明公开了基于牛顿迭代的数控轨迹控制方法,属于数控系统领域,现有技术的控制方法,两次利用牛顿迭代法求解高阶方程组,并进行二次迭代修正,最终得到符合加工要求的时间规划值。但是直接利用牛顿迭代法求解方程组得到收敛值误差大,需要消耗较长的时间进行修正。根据效率最优原则以及位移、速度、加速度约束条件,对运动的7个不同时间段进行规划。对关于加速度变化时间的一元高次方程进行数学分析,根据它的单调性,构造平方函数,转换为单一凸形函数,进而利用牛顿迭代法求出它的收敛值。本发明解决现有控制方法过程复杂、繁琐问题,提供了一
一种基于间歇迭代学习控制的平面机械臂轨迹跟踪方法.pdf
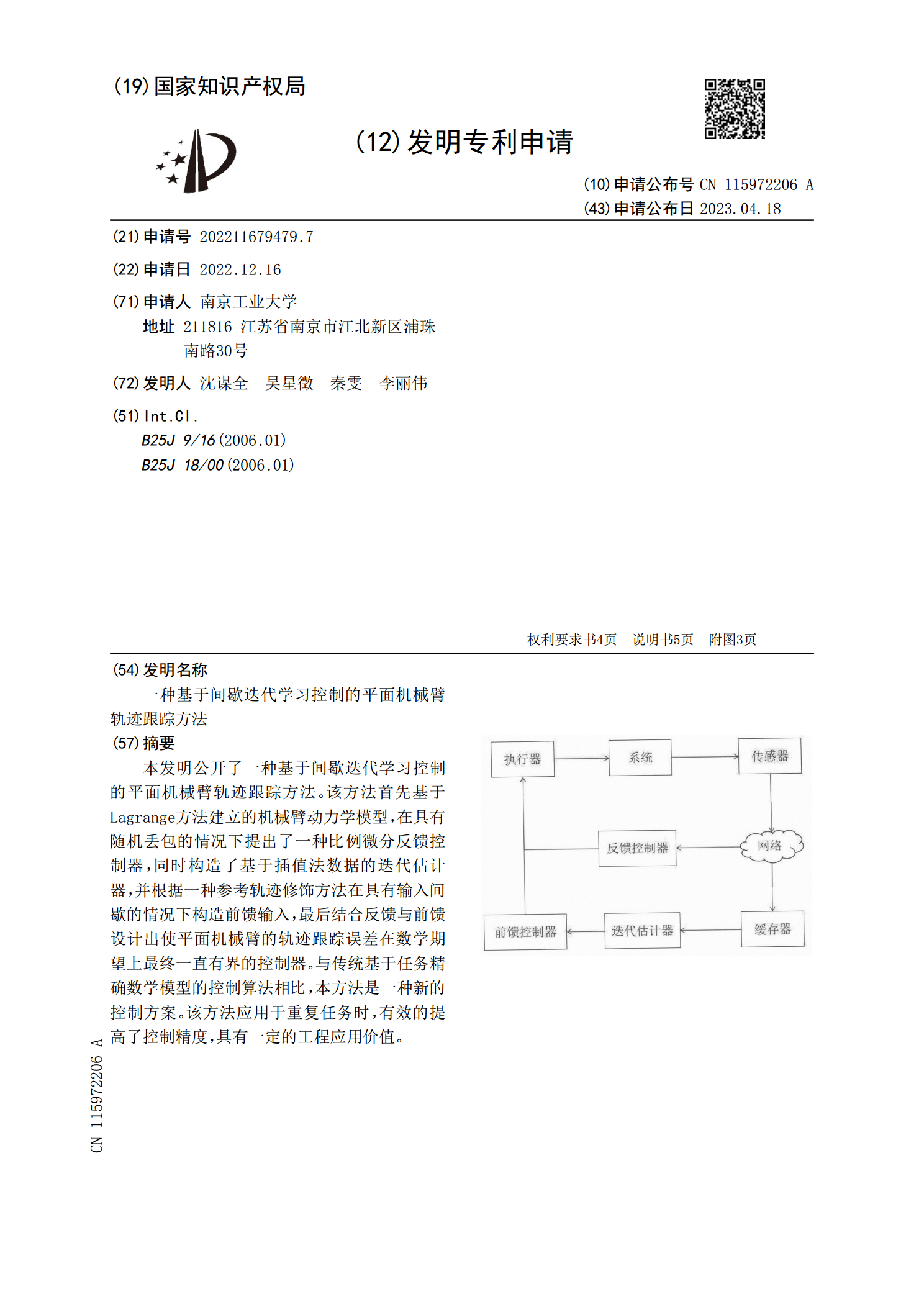
本发明公开了一种基于间歇迭代学习控制的平面机械臂轨迹跟踪方法。该方法首先基于Lagrange方法建立的机械臂动力学模型,在具有随机丢包的情况下提出了一种比例微分反馈控制器,同时构造了基于插值法数据的迭代估计器,并根据一种参考轨迹修饰方法在具有输入间歇的情况下构造前馈输入,最后结合反馈与前馈设计出使平面机械臂的轨迹跟踪误差在数学期望上最终一直有界的控制器。与传统基于任务精确数学模型的控制算法相比,本方法是一种新的控制方案。该方法应用于重复任务时,有效的提高了控制精度,具有一定的工程应用价值。

牛顿迭代牛顿迭代法.ppt
12345678910111213141516171819202122

基于迭代域的迭代学习控制方法的研究的中期报告.docx
基于迭代域的迭代学习控制方法的研究的中期报告介绍:本研究基于迭代域的迭代学习控制方法,旨在解决动态不确定性下复杂系统的控制问题。在前期研究中,我们提出了一个基于模型参考自适应控制器的迭代学习控制框架,并通过仿真实验进行了验证。本篇中期报告主要介绍我们在实验中遇到的一些问题和改进措施,以及更新的研究进展。问题探讨:在仿真实验中,我们发现控制器存在过学习问题,即在学习过程中控制器只考虑了当前状态而忽略了系统的历史状态,导致控制性能下降。另外,模型参考自适应控制器的设计需要非常准确的系统模型,在实际应用中很难满

基于函数逼近的柔性机械臂变轨迹迭代学习控制的综述报告.docx
基于函数逼近的柔性机械臂变轨迹迭代学习控制的综述报告柔性机械臂是一种主要由软材料和可变形材料制成的机械臂,以其高度的柔性和适应性而被广泛应用于许多需要高精度和高效率的应用领域。在机械臂的运动控制中,路径的规划和控制是至关重要的一环,影响着整个机械臂的运动精度和控制效率。近年来,基于函数逼近的柔性机械臂变轨迹迭代学习控制成为了研究的热点。本文将对该方法的研究现状进行综述。基于函数逼近的柔性机械臂变轨迹迭代学习控制的基本思路是采用以模型为基础的控制方法来实现路径控制与规划。具体而言,该方法通过使用基于神经网络