
基于无控制点的双机载SAR图像目标定位的方法.pdf

阳炎****找我

1/10

2/10
3/10

4/10

5/10

6/10

7/10
8/10
9/10

10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于无控制点的双机载SAR图像目标定位的方法.pdf
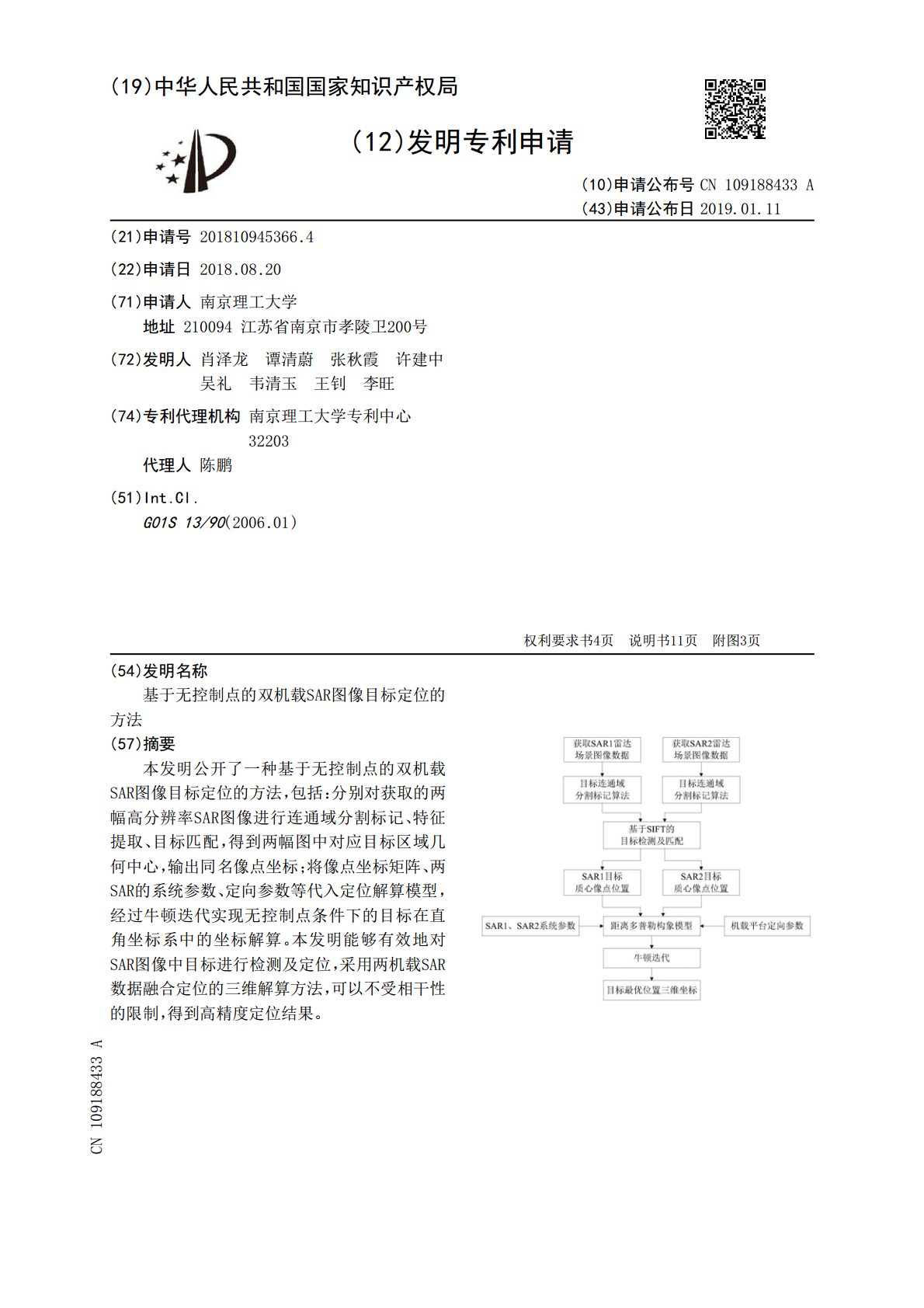
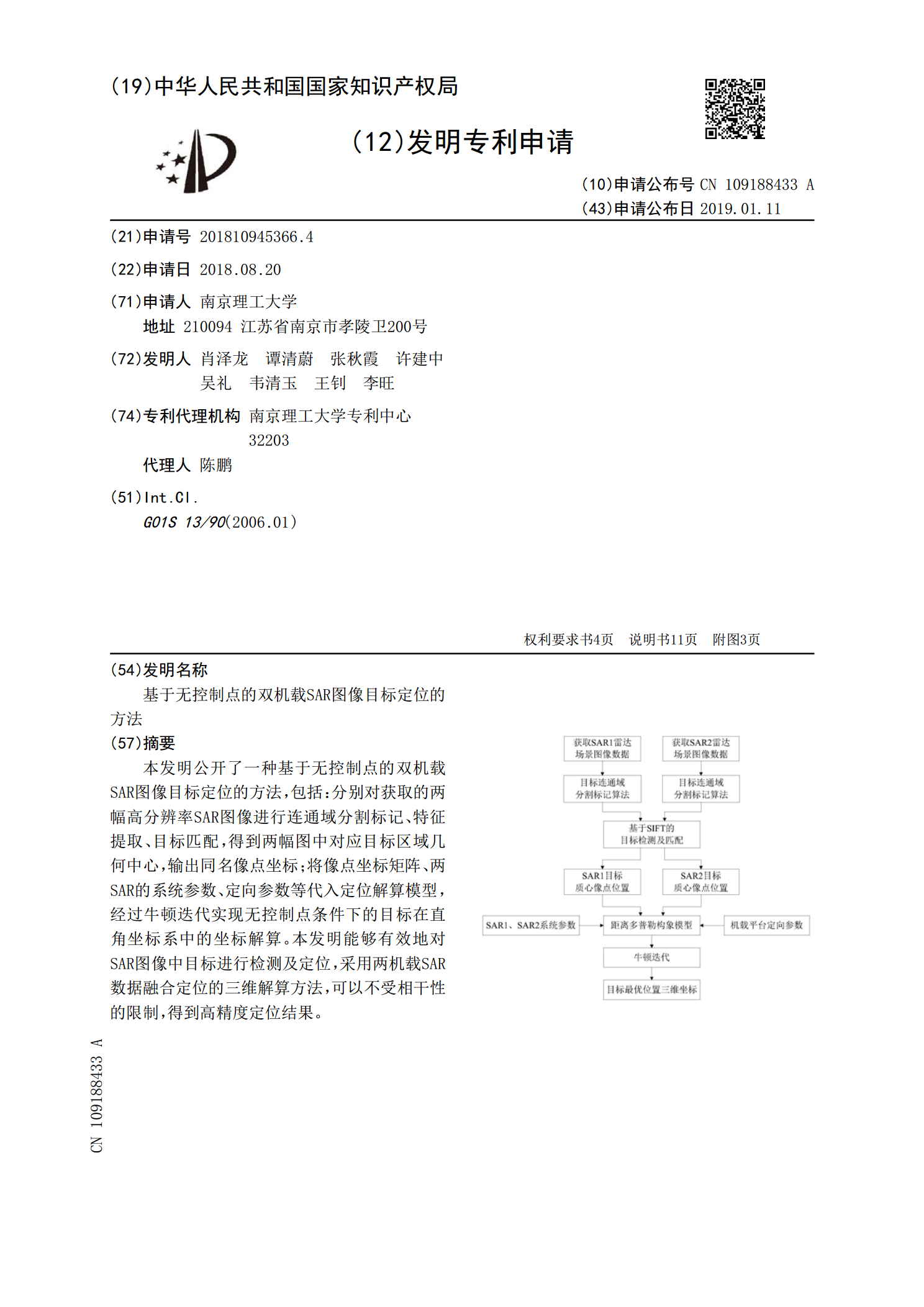
本发明公开了一种基于无控制点的双机载SAR图像目标定位的方法,包括:分别对获取的两幅高分辨率SAR图像进行连通域分割标记、特征提取、目标匹配,得到两幅图中对应目标区域几何中心,输出同名像点坐标;将像点坐标矩阵、两SAR的系统参数、定向参数等代入定位解算模型,经过牛顿迭代实现无控制点条件下的目标在直角坐标系中的坐标解算。本发明能够有效地对SAR图像中目标进行检测及定位,采用两机载SAR数据融合定位的三维解算方法,可以不受相干性的限制,得到高精度定位结果。
机载SAR图像目标定位方法.pdf
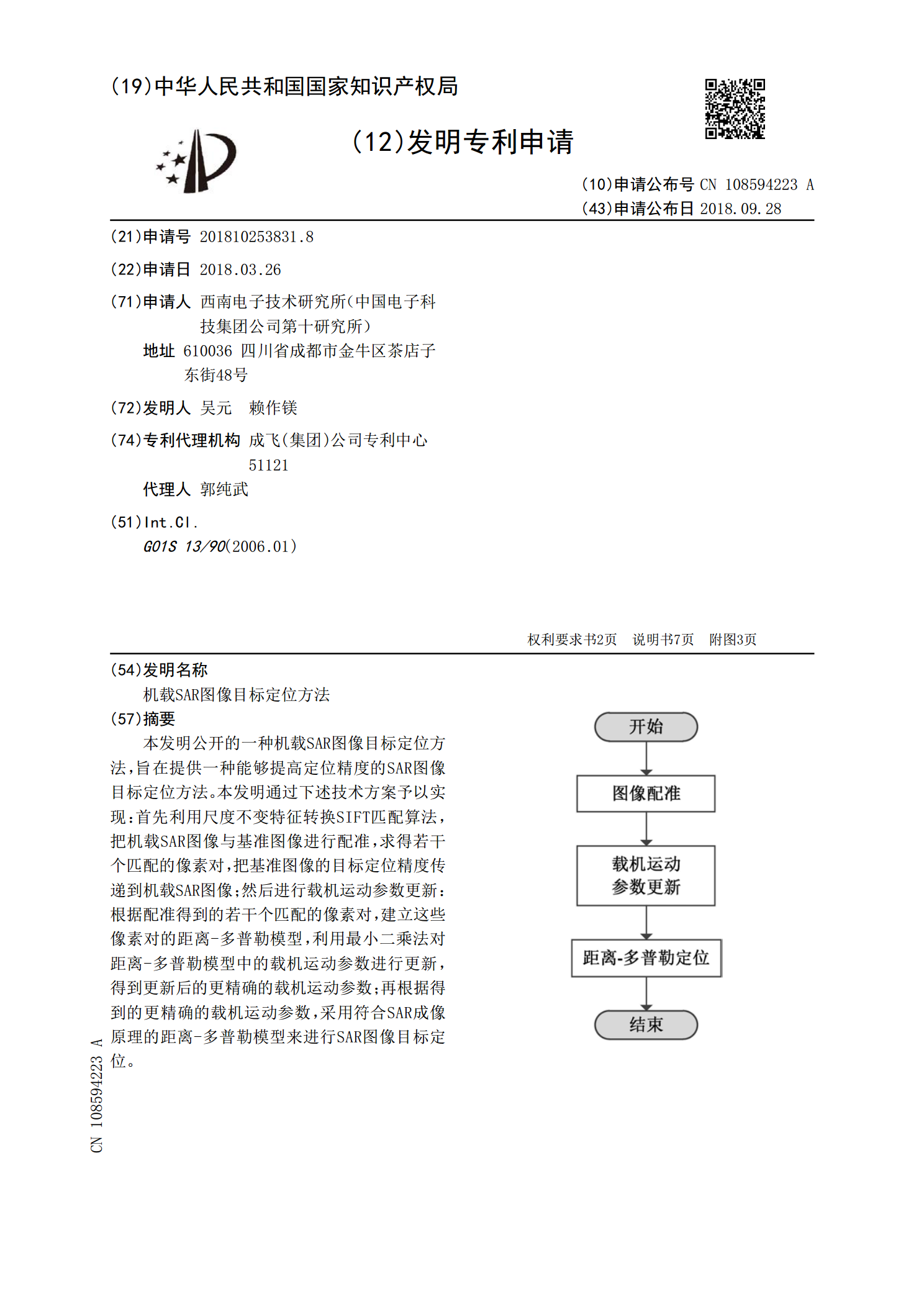
本发明公开的一种机载SAR图像目标定位方法,旨在提供一种能够提高定位精度的SAR图像目标定位方法。本发明通过下述技术方案予以实现:首先利用尺度不变特征转换SIFT匹配算法,把机载SAR图像与基准图像进行配准,求得若干个匹配的像素对,把基准图像的目标定位精度传递到机载SAR图像;然后进行载机运动参数更新:根据配准得到的若干个匹配的像素对,建立这些像素对的距离‑多普勒模型,利用最小二乘法对距离‑多普勒模型中的载机运动参数进行更新,得到更新后的更精确的载机运动参数;再根据得到的更精确的载机运动参数,采用符合SA

机载条带SAR图像绝对定位方法研究.docx
机载条带SAR图像绝对定位方法研究随着遥感技术的快速发展,机载条带SAR(合成孔径雷达)成为了一种重要的遥感技术应用之一。机载条带SAR可以获取大范围、高分辨率的地形、地貌、地物等信息,具有广泛的应用前景。机载条带SAR图像的绝对定位是机载条带SAR技术研究中的一个重要问题,在实际应用中具有很高的实用价值。一、机载条带SAR图像绝对定位的概述机载条带SAR图像绝对定位是指确定机载条带SAR图像的绝对位置和方向,实现SAR图像与地球表面的精确对应。SAR图像绝对定位是机载条带SAR应用的基础,它直接影响到S

机载SAR图像的海上目标检测方法的研究的任务书.docx
机载SAR图像的海上目标检测方法的研究的任务书任务书一、任务背景合成孔径雷达(SyntheticApertureRadar,简称SAR)具有天气、夜间、云蒙等环境下的探测优势,因此在海上目标监测中有着广泛应用。机载SAR是一种在飞机上安装SAR系统进行监测的方法,具有高速度、大范围和高分辨率等特点。目前,机载SAR已经成为海上目标检测的重要手段之一,广泛应用于海洋资源勘探、航道测量、渔业调查、海上无人机巡航等领域。然而,机载SAR系统数据处理涉及的专业知识和技术门槛较高,如何高效地进行海上目标检测成为值得

基于轮廓特征的无人机载SAR图像匹配方法.pdf
本发明公开了一种基于轮廓特征的无人机载SAR图像匹配方法,包括:步骤1,对基准SAR图像和实时SAR图像进行预处理;步骤2,对预处理后的图像进行图像分割,并对图像分割后的图像进行边缘检测、轮廓跟踪,获得基准SAR图像的闭合轮廓图和实时SAR图像的闭合轮廓图;步骤3,计算闭合轮廓图的质心距离,构建归一化轮廓中心距特征描述子;步骤4,采用欧氏距离对归一化轮廓中心距特征描述子进行双向匹配,取其交集作为正确匹配轮廓对。该方法增强了图像匹配算法对图像信息的利用度和对图像相干斑噪声的鲁棒性,并且对图像的几何形变具有很